
Fターム[3C007LW04]の内容
マニピュレータ、ロボット (46,145) | 具体的な制御方法 (336) | オブザーバを用いるもの (40)
Fターム[3C007LW04]の下位に属するFターム
外乱オブザーバ (21)
Fターム[3C007LW04]に分類される特許
1 - 19 / 19
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
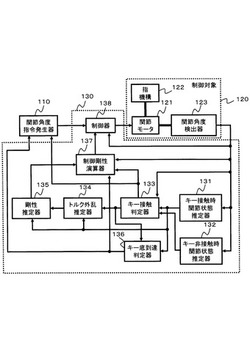
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
力制御装置

【課題】力覚センサの低コスト化を実現しながら、ロボットの先端部に作用する外力を高精度に算出すること。
【解決手段】モータにより駆動されるロボット3と、前記ロボット3の先端部が指令位置に追従するように前記モータを駆動する電流指令を生成するロボット制御手段2と、前記ロボット3の先端部の6個の動作方向のうち、x軸方向、y軸方向、z軸方向の3個の動作方向の夫々にかかる外力を検出する力覚センサ31と、前記力覚センサ31の検出値、前記モータの位置、および前記電流指令に基づいて、前記ロボットの先端部のn個の動作方向のうちの少なくとも前記力覚センサ31が外力を非検出とする3つの軸の回転方向の外力算出に必要となる摩擦係数を夫々同定し、当該同定した摩擦係数に基づいて当該3つの軸の回転方向にかかるモーメントの推定値を算出する力推定オブザーバ4と、を備える。
(もっと読む)
3軸力センサを用いて力制御をおこなうロボットの制御装置
【課題】3軸力センサによっては検出できない力およびモーメントを推定する。
【解決手段】ツール(4)およびワーク(W)の一方に対して他方をロボット(1)の手先部によって相対的に移動させ、ツールとワークとの間に作用する力を制御するロボット制御装置(11)は、1軸方向の力と、該1軸に直交で且つ互いに直交する2軸方向の軸回りのモーメントとを検出する力検出部(3)と、ツール(4)とワーク(W)との間に作用する力を推定するための力推定用点を設定する力推定用点設定部(12)と、力検出部により検出した1軸方向の力および2軸方向の軸回りのモーメントと、力推定用点設定部により設定された力推定用点の位置とに基づいて、前記2軸方向の力またはさらに前記1軸回りのモーメントととを推定する力推定部(13)と、を備える。
(もっと読む)
外力判定用パラメータ決定装置及びプログラム、並びに移動体装置
【課題】ロボットに与えられている外力判定を高精度に行うための閾値を決定する。
【解決手段】近似部142が、ロボットに対して人的操作による外力及び積載による外力をそれぞれ与えたときにロボットに加わる垂直抗力を所定のサンプリング周期(Δt)で取得し、各サンプリング間隔における垂直抗力の変動量を指数関数で近似する。また、取得部144が、f0の値を変更しつつ、各外力における垂直抗力の変動量がf0を超える確率GL、GHをそれぞれ求め、それらの確率の差分を取得する。そして、パラメータ導出部146が、取得部が取得した確率の差分に基づいて選択されるf0の値を、外力の判定に用いるパラメータ(閾値fc)とする。
(もっと読む)
力制御装置
【課題】力制限を超過した際にロボットを停止処理する場合においても、作用力が許容値以下となる制約を満たす範囲で、動作時間の短縮化、立上げ調整時間の短縮化を図る。
【解決手段】対象物に対するロボットの目標位置指令を生成する指令生成手段(10)と、目標位置指令に応じて追従制御を行うロボット制御手段(20)と、対象物からロボットへ働く作用力が所定の力制限値を超過した場合に停止指令を生成する力制限超過判別手段(30)と、ロボットを減速停止させる場合を考慮して、対象物の特性および所定の力制限値に基づいて、減速停止中において作用力が所定の許容値以下になる制約を満たす範囲で動作速度を最大にする最適速度を算出する速度最適化手段(40)とを備え、指令生成手段(10)は、最適速度に応じた目標位置指令を生成し、停止指令を受信した場合には、ロボットを減速停止させる指令を生成する。
(もっと読む)
ロボットの制御装置およびロボットを制御する方法
【課題】ロボットがラフな寄り付きでそのまま精密な作業をすることができるための作業教示データ修正方法、および装置を提供する。
【解決手段】ロボットが行うべき作業対象物に対する作業手順を記憶する作業手順記憶手段と、再生時のロボットと作業対象物との相対的位置及び相対的姿勢が、別の位置及び姿勢となったことを位置・姿勢検出手段によって検出したことに応じて、位置及び姿勢の変化量を獲得し、算出値に基づいて作業手順を修正する作業手順修正手段とを備え、修正される作業手順が、接触状態検出手段によって検出された作業対象物の位置及び姿勢をもとに得られる、ロボットを基準とした座標から作業対象物を基準とした座標への同次変換行列を用いてロボットを基準とした座標上での作業手順として与えられる、ロボットの制御装置。
(もっと読む)
移動体遠隔操作システム、環境情報収集システム
【課題】直進運動と回転運動についてのバイラテラル制御を正確に行うことが可能な移動体遠隔操作システム等を提供すること。
【解決手段】人が操作を行う操作デバイスを有する操作システムと、前記操作システムに対してなされた人の操作に基づいて駆動される移動体システムと、を備え、前記操作デバイスには、前記移動体システムが環境から受けた反力を再現するためのアクチュエータが取り付けられ、前記操作システムと前記移動体システムとの間でバイラテラル制御が行われる移動体遠隔操作システムであって、前記操作デバイスには、直進運動指示と回転運動指示の双方を含む操作が可能となっており、前記バイラテラル制御の少なくとも一部において、直進運動と回転運動のそれぞれについて独立した演算を行うことを特徴とする、移動体遠隔操作システム。
(もっと読む)
ロボットの制御装置
【課題】ロボットのリンクの振動を十分に抑制する。
【解決手段】複数のリンクと、対応するリンクを駆動する複数のモータとを有するロボットの制御装置であって、対応するモータの回転角度または回転角速度を検出する複数のセンサと、各リンクと対応するモータとの間のバネ要素それぞれについて、そのねじれ角度およびねじれ角速度を、複数のモータそれぞれへの制御入力と複数のセンサそれぞれが検出した回転角度または回転角速度とに基づいて推定する状態観測器と、状態観測器が推定した対応するバネ要素のねじれ角度およびねじれ角速度に基づいて、対応するバネ要素のねじれが解消するトルクをモータが出力するように、対応するモータの制御入力に加算するトルク補償量を算出する複数のトルク補償量算出手段と、トルク補償量算出手段が算出したトルク補償量を加算した制御入力を対応するモータに出力する複数のモータ制御手段とを有する。
(もっと読む)
制御装置
【課題】力センサを用いることなくマニピュレータの先端に作用する力を高精度に求める。
【解決手段】フィンガ14の制御装置10は、関節毎のトルクT1、T2、T3を求めるトルク取得部72と、角度センサ26a〜26cにより関節毎の角度を検出して、フィンガ14の姿勢に関するヤコビ行列を求める行列演算部76と、トルク取得部72で得られたトルクT1〜T3を行列演算部76で得られたヤコビ行列に当て嵌めて、座標変換によってフィンガ14の先端に作用する外力を演算する先端力演算部74とを有する。トルク取得部72は、関節毎に設けられたモータ24a〜24cに対するモータ指令u1〜u3とトルクT1〜T3との関係を示し、関節毎に設けられたトルクマップ82a〜82cを有する。トルク取得部72は、トルクマップ82a〜82cを参照することによってトルクT1〜T3を求める。
(もっと読む)
マニピュレータシステムおよびその制御方法
【課題】把持力等の作用力を安定に精度よく制御可能なマニピュレータシステムおよびその制御方法を提供する。
【解決手段】マニピュレータシステムの制御装置2は、把持開始推定オブザーバ51と、把持角度決定部52と、逆キネマティック行列演算部53と、PID制御部54と、モータ駆動部55と、目標把持角度設定部56と、最閉角度決定部57と、操作量更新部58とを有する。把持開始推定オブザーバ51は把持開始角度を推定し、推定した把持開始角度に基づいてグリッパ4の最閉角度を設定して、最閉角度に達するまでグリッパ軸角度を制御する。これにより、モータのトルク制御で把持力を制御する場合よりも、精度よくグリッパ4の把持力制御が可能となる。
(もっと読む)
部品把持装置とその方法
【課題】部品を把持したままで、部品の角度や位置を制御でき、且つ迅速な把持力制御が可能であり、部品搭載装置に適用したときには部品認識から部品搭載までを迅速に行う。
【解決手段】部品102を把持する把持手段150と該把持手段150を制御する制御手段180とを有する部品把持装置において、前記把持手段150が、前記部品102を把持するための3つ以上の把持爪172、174、176と、該把持爪172、174、176を駆動する互いに独立した駆動源154、156、158とを備え、且つ、前記制御手段180が、前記把持手段150を制御するための外乱オブザーバ200と、軸ねじれ反力推定オブザーバ202とを備え、前記制御手段180から前記駆動源154、156、158への制御指令により前記把持手段150が共振比制御される。
(もっと読む)
制御装置、制御方法、プログラム及びロボット
【課題】本発明は、安定した目標位置追随制御を実現可能な制御装置を提供する。
【解決手段】駆動軸の検出位置を入力するための駆動軸位置入力手段101と、出力軸の検出位置を入力するための出力軸位置入力手段102と、出力軸の位置と駆動軸の位置との関係を示す干渉行列に関するデータを保存するための記憶手段4と、出力軸の目標位置と入力された出力軸の位置に対して、データを用いて駆動軸に対する位置補償を算出する位置補償算出手段11と、入力された出力軸の位置及び入力された駆動軸の位置に対して、データを用いて駆動軸に対するトルク補償を算出するトルク補償算出手段17と、位置補償及びトルク補償から、駆動源への指令値を算出する指令値算出部15と、指令値に基づいて駆動軸を駆動するための信号を出力する出力手段103とを備える。
(もっと読む)
マニピュレータ装置
【課題】マニピュレータ装置において、オートクレーブ滅菌を可能としつつ、高帯域の力覚をフィードバックでき、安定性と応答性を向上すること。
【解決手段】マニピュレータ装置は、スレーブマニピュレータ1、マスタマニピュレータ2、制御装置3を備える。スレーブマニピュレータ1及びマスタマニピュレータ2は、ジンバル部に平行リンクを介して結合した並進軸をそれぞれに備える。制御装置3はスレーブエンコーダとマスタエンコーダの検出信号に基づいて生成した広帯域の力覚を術具17からマスタマニピュレータ2の手元操作部27にフィードバック制御する。
(もっと読む)
ロボットシスシステム及びロボット制御装置
【課題】所望の時刻での位置を高精度に推定することが可能なロボットシスシステム及びロボット制御装置を提供する。
【解決手段】 モータによって所定部位が動作するロボット2と、モータをサーボ制御するサーボ制御器と、個々のサーボ制御器21等に対して動作指令を送信するロボット制御装置1と、を有するロボットシステムにおいて、ロボット2には、モータの回転角度に基づく位置データを検出するセンサと、が設けられ、ロボット制御装置1には、サーボ制御器21等への動作指令を生成するとともに、位置データを受信するホスト制御器10と、現在又は将来の位置データを推定する推定器13と、が設けられ、推定器13は、動作指令とサーボ制御器21等のサーボ制御パラメータを使用したシミュレータ出力を、既に知られた過去の位置データで補正することによって、現在又は将来の位置データを推定する。
(もっと読む)
モーション習得システムおよびその制御方法
【課題】未知の実環境との安定した接触動作を確立すると共に、人間の指のようなモーションを個々に抽出,保存,再現できるようにする。
【解決手段】ロバスト性を保ちつつ制御剛性をゼロにする加速度制御を、外乱オブザーバにより各ロボットシステムのアクチュエータ1に行なう。アクチュエータ1の外乱加速度θ・・extと加速度応答θ・・resとを、モード加速度変換手段27,28によりモードクオリー行列を用いて直交座標系の非干渉モードにおける加速度外乱m・・extや加速度応答値m・・resに変換する。そして、これらの加速度外乱m・・extや加速度応答値m・・resを基に、非干渉モードの各々に対応した対象物47に対するモーションを抽出する。
(もっと読む)
ロボット装置
【課題】 ロボットが外界と多様な物理インタラクションを行なった際にも、体の任意箇所における接触状態と作用力をともに計測する。
【解決手段】 各関節アクチュエータにおける現在の位置、速度、発生力を計測するとともに、機体上の1箇所で加速度及び角速度を計測する。機体上の外界との接触状態を検出して、外力の作用点を特定して、操作空間上でダイナミクス演算により操作空間慣性逆行列及びバイアス加速度を求めることにより、運動方程式上の既知項を算出し、操作空間慣性逆行列及びバイアス加速度の間に前記運動方程式に合致する関係が成立するように、外力の作用状態を推定する。
(もっと読む)
2脚ロボットの歩行制御装置および歩行制御方式
【課題】
2脚動歩行ロボットの転倒安定化と歩容生成を同時に解決する歩行制御装置であって、安価なCPUを用いて実時間で動作可能なもの、ならびにその歩行制御方式を提供する。
【解決手段】
本発明による歩行制御装置ならびにその歩行制御方式は、外力に対して受動的に歩行が生成されるように脚の運動を拘束することを特徴とし、とくに股関節部と遊脚の重心とを結ぶ直線が鉛直面となす角度およびその角速度が、支持脚のそれと鏡像関係になるように各関節を駆動した上で、上体の姿勢を目標とする歩行速度に応じて適応的に傾斜させることにより、実時間で安定な歩容を生成することができる。さらに重心がZMPの真上に位置しながら等速前進するように足首を操作することでエネルギー効率を高めることができる。
(もっと読む)
多関節型ロボットの制御方法
【課題】 従来のオブザーバ制御演算装置では、ロボット自身の姿勢や、アームに取り付ける負荷に変化に対応し、制御性能の劣化を防ごうとすると、負荷イナーシャ、状態オブザーバ、状態FBのパラメータのリアルタイムでの演算が必要であり、演算処理の負荷が非常に多くなるという課題を有していた。
【解決手段】 アームに取り付けられる複数の負荷に対応して予め調整されたパラメータを持つ複数の状態オブザーバ並びに状態FBの演算を同時に行い、アームに取り付けられる負荷情報に基づいて、それぞれの状態FB値のモータ電流指令への加算量を調整する手段を備えることにより、リアルタイムで負荷イナーシャ、状態オブザーバ、状態FBのパラメータ演算を行う必要はなく、十分な振動抑制効果が得られる状態で、演算時間を削減することができる。
(もっと読む)
ロボットの制御装置及び制御方法
【課題】 ロボットの手先部を設定された目標軌道に追従させるように制御するものにあって、目標軌道に対する実際のロボットの軌道のずれを効果的に低減する。
【解決手段】 ロボットコントローラのCPUは、所定のサンプリング時間毎に、目標軌道を細分化して途中目標点を設定し、その途中目標点にロボット本体の手先部を移動させるように位置指令(角度指令)Ptを出力するようになっている。このとき、現在(k)から所定のサンプリング時間先(k+n)のロボット本体の手先部の位置をモデルを用いて推定し、推定された位置と目標軌道とのずれを求めて位置指令の補正値を算出し、算出した補正値により現在の位置指令Pt(k)を補正する。このとき、推定されたロボット本体の手先部の位置から、目標軌道上に下ろした垂線ベクトルPαを補正値とする。
(もっと読む)
1 - 19 / 19
[ Back to top ]