
Fターム[3C007MT02]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 制御、動作の高速化 (87)
Fターム[3C007MT02]に分類される特許
61 - 80 / 87
位置制御装置、位置制御方法及び位置制御プログラム
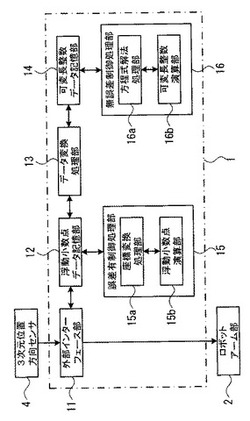
【課題】リンク機構の制御動作を安定化及び高信頼化することができるとともに、リンク機構を高精度に制御することができる位置制御装置を提供する。
【解決手段】データ変換処理部13は、ロボットアーム21の先端部の目標データPから関節角度θを求める解法処理に使用される係数aij及び係数biを浮動小数点データ形式から可変長整数データ形式へ変換し、無誤差制御処理部16は、可変長整数データ形式の係数aij及び係数biを用いて除算を除く加減算及び乗算からなる無誤差演算を実行して係数a6ii及び係数b6iを求め、データ変換処理部13は、係数a6ii及び係数b6iを可変長整数データ形式から浮動小数点データ形式へ変換し、誤差有制御処理部15は、上記解法処理において浮動小数点データ形式の係数a6ii及び係数b6iを用いて1回のみの除算を含む浮動小数点演算を実行することにより浮動小数点データ形式の関節角度θを求める。
(もっと読む)
ロボットハンド装置

【課題】 滑りの有無を効率的に判断できるロボットハンド装置を提供する。
【解決手段】 物体Wを把持する把持手段2と、該把持手段に設けられ前記物体との接触圧を複数点で検出する接触圧検出手段3と、前記接触圧検出手段の出力に基づいて前記把持手段による前記物体の把持力を制御する制御手段8と、前記把持手段を移動させる移動手段5とを備えて、前記物体を把持して移動させるロボットハンド装置1であって、前記制御手段8が、前記把持手段2の移動方向に基づいて、前記接触圧検出手段が検出する前記接触圧をスキャンする領域を限定する。物体Wが滑り出す領域の接触圧だけを監視するようにしているので、高周波の信号が接触圧検出手段から出力されても短時間で処理して、滑り発生の有無を効率良く判断できる。
(もっと読む)
プログラムの教示点修正方法及びプログラム教示点修正装置
【課題】 ロボット教示点の修正作業を短時間で行うことができるプログラムの教示点修正方法及びプログラム教示点修正装置を提供する。
【解決手段】 教示された動作経路にしたがってロボットを動作させるプログラムの教示点修正方法において、対象ワークのCADデータに付加された加工指示データと、CADデータ上の相当加工部位に対するロボットの教示点とを関連付けて記憶し、個々の加工指示データの精度を基準となる精度と比較し、加工指示データの精度の優劣を相対評価して、多数の相当加工部位の中から寸法精度の劣る相当加工部位を特定し、特定した相当加工部位に対応する対象ワークの実加工部位を計測し、実加工部位の計測データに基づいて教示点を修正する。
(もっと読む)
情報処理システム、情報処理装置および方法、並びにプログラム
【課題】時系列データに対する計算処理をより高速に行うことができるようにする。
【解決手段】 サーバノードは、ステップS21において、端末装置より送信される時系列データを元データ271として取得し、時系列上において隣り合う分割データ同士でその範囲の一部が重複する(境目付近のデータがどちらの部分データにも含まれる)ように時系列データを分割し、その分割データ281乃至284をそれぞれクライアントノード291乃至294に分配する。各クライアントノードは、ステップS23において、分割データに対する予測計算を並列的に行い、得られた計算結果をサーバノードに送信する。サーバノードは、ステップS24において、それらの計算結果を時系列に沿って集約し、1つの出力用時系列データ301を作成し、それを端末装置に出力する。本発明は、予測計算情報処理システムに適用することができる。
(もっと読む)
ロボットの制御装置
【課題】 ロボットの基準可動部が予め定められる設定位置に達したときに設定位置通過信号を出力する場合において、基準可動部の速度低下を防ぐロボットの制御装置を提供する
【解決手段】 移動開始位置Aから移動終了位置Bまで直接移動する移動速度でロボットハンド19を移動させる。移動開始位置Aから移動終了位置Bに移動するまでの移動経路上の設定位置をロボットハンド19が通過したとすると、設定位置通過信号を出力する。このとき、ロボットコントローラ24は、設定位置Cに達する前後でロボットハンド19の移動速度を低下させることがない。したがって設定位置Cの存在に起因する、ロボットハンド19の移動速度の低下を防ぐことができ、ロボットハンド19の移動時間の不所望な増長を防ぐことができる。これによってサイクルタイムを短縮することができ、ロボットの作業性を向上することができる。
(もっと読む)
ロボットの経路作成方法及び装置
【課題】 バックトラックを生じることなく短時間かつ小さな計算負荷で経路を求めることのできるロボットの経路作成方法を提供する。
【解決手段】 第nアームの姿勢のうち、作業空間内に存在する障害物と干渉せず、かつ、第n+1アームが障害物と干渉しない姿勢を少なくとも一つ有する姿勢を、前記第nアームの保持可能姿勢として、第nアームの保持可能姿勢集合テーブルに基づき、隣接する格子点の間で一の姿勢から他の姿勢に連続的に移動できる姿勢を集めた可接続関係テーブルを第1アームから第Nアームまでの各々について作成し、最終目標点と各アーム目標点とから、前記ロボットが最終目標点に到達可能か否かを判断し、到達可能と判断したときに、前記可接続関係テーブルに基づき、前記第1アーム〜第Nアームの各々を初期姿勢から順次前記最終目標点及び各前記各アーム目標点に向けてスタートさせて前記移動経路を作成する。
(もっと読む)
ロボット制御装置および制御方法
【課題】 衝撃や振動を抑えるとともに、タクトタイムが増加しない、直交座標系での精度が低下しない、指令速度を守るというような用途に合った動きを実現することができるロボット制御装置を提供する。
【解決手段】 作業指令から直交座標系運動指令を生成して、電動機へのトルク指令を生成するロボット制御装置において、制御シミュレーションを行うシミュレーション演算部と、前記シミュレーション演算部にて演算された内部の状態量を評価する状態量評価部と、前記状態量評価部にて評価された結果に基づき速度や加減速時間などの運動指令生成のためのパラメータを調整するパラメータ調整部とを備える。
(もっと読む)
遠隔操作装置および遠隔操作方法
【課題】 運動物体に関連する作業を映像に基づいて正確に遠隔操作することができる遠隔操作装置および遠隔操作方法を提供する。
【解決手段】 実作業空間100のカメラ13は作業アーム11を撮像し、その映像を映像信号として通信回線30を経由して仮想作業環境200の映像合成装置23に送信する。動画像生成装置24は合成映像の背景となる動画像を生成する。映像合成装置23は実作業空間100から送信された映像に動画像を合成する。広視野ディスプレイ25は映像合成装置23により得られる合成映像を表示する。操作者50は広視野ディスプレイ25に表示された合成映像を見ながらマスタアーム21を操作する。マスタアーム処理システム22は操作信号を実作業空間100の作業アーム制御システム12に送信する。作業アーム制御システム12はその操作信号に基づいて作業アーム11の動作を制御する。
(もっと読む)
加工装置
【課題】 加工精度を保ってタクトタイムを短縮できるように、ワークと計測機と加工機とを効率よく動作させる加工装置を提供する。
【解決手段】 搬入ステージ2に搬入ロボット10を設け、計測ステージ3に計測ロボット11、加工ステージ4に溶接ロボット12を設け、搬出ステージ5に搬出ロボット13を設け、前記計測ロボット11と溶接ロボット12との間にわたって複数のレーン6a,6b,6cを備えたスライド装置7を設け、この複数のレーンにそれぞれ往復移動する固定ジグ8a,8b,8cを設け、前記搬入ロボット10で各固定ジグ8a,8b,8cにホイール14を順次移送すると共に、この固定ジグをスライド装置に沿って移動させて前記計測ロボット11によるワーク計測部の計測と前記溶接ロボット12によるワーク計測部への加工とを行った後に前記搬出ロボット13で搬出するように制御する制御装置を設ける。
(もっと読む)
塗装用装置
【課題】塗料の飛散等による塗装不良を低減し、塗装工程に掛かる時間を短縮できる塗装用装置を提供する。
【解決手段】被塗装部材26に塗料を噴霧して塗装を行う塗装ロボット20と、搬送路24に沿って被塗装部材26を搬送するための走行軸22aと、被塗装部材26の姿勢を変更するためのアーム22bとを有し、被塗装部材26を把持して搬送する搬送ロボット22と、を備える塗装用装置200により上記課題を解決することができる。
(もっと読む)
ロボット制御装置
【課題】 実際にワークが配置されている位置に応じた経路に沿ってロボットハンドを移動させ、ロボットハンドの動作のサイクルタイムを低減させる。
【解決手段】 ロボット制御装置では、まず、ロボットハンドの接近経路及び離隔経路を設定するために特定の目標位置が選定され、選定された特定の目標位置に対するロボットハンドの接近経路と離隔経路として異なる複数の経路パターンを経路パターン記憶手段に記憶される。次に、視覚センサによって検出されたワークの位置に基づいて、経路パターン記憶手段に記憶された複数の経路パターンから一つの経路パターンを選択し、ロボットハンドが向かうべき目標位置と実際のワークの位置とが一致するように、選択された経路パターンを修正したものを接近経路及び離隔経路として規定し、規定された接近経路及び離隔経路に沿ってロボットハンドを移動させる。
(もっと読む)
分散制御システム
【課題】 階層的に構成された分散制御システムにおいて、上位モジュールと中位モジュールとの間の通信負荷を増大させることなく、中位モジュールと下位モジュールとの間の通信負荷を軽減することにより通信時間を短くし、もって高速制御を可能とするとともに、通信バス配線を少なくしてロボットや自動化機器内の配線の手間を軽減することができる分散制御システムを提供する。
【解決手段】 複数の駆動軸を制御する自動化機器内に機能別に上位から下位までの複数のモジュールを通信バス35により階層的に結合して構成された分散制御システムであって、前記モジュールのうち階層的にみて最下位のモジュール23は複数あり、この複数の最下位のモジュール23は、直接的にその上位に位置するモジュール21に対し、相互に独立した複数系統の通信バス35により複数グループに分割して結合されている。また、複数系統の通信バス35は、自動化機器の機械的構造に合わせて配線されているとよい。
(もっと読む)
産業用ロボット
【課題】昇降部の落下をより確実に防止でき、設計上の自由度を向上可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1000は、基体部B1と、基体部B1に対して昇降可能な昇降部B2と、モータ110と、モータ110の駆動力を伝達する伝達機構ST1と、伝達機構ST1を介して伝達される駆動力により昇降部B1を昇降させる駆動機構ST2と、モータ110から昇降部B2への駆動力の伝達の異常を検出するセンサ70と、基体部B1に支持され、センサ70により異常が検出されたときに、昇降部B2に係合する位置へ移動して昇降部B2の落下を防止するストッパプレート90と、を備える。
(もっと読む)
搬送装置およびスパッタリング装置
【課題】搬送効率を向上させ得る搬送装置を提供する。
【解決手段】ベース部31を回動させるモータ32と、ベース部31の中心部に挿通された中心軸33を回動させるモータ34と、基材101を保持可能に構成されると共に中心軸33に対して接離する方向に沿ってスライド可能にベース部31に配設されたスライダ35a,35bと、中心軸33の回動に応じてスライダ35a,35bをスライドさせるリンク機構とを備えている。これにより、基材101を搬送する効率を向上させることが可能となる。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】 高い計算能力を要せず簡単な計算で精度よく、姿勢に応じた最大加速度を求めて、低コストにロボット動作の高速化をはかる。
【解決手段】 ロボットアーム5の現在位置と目標位置から姿勢算出部7で各位置での姿勢を求め、その姿勢情報から、許容最大加速度算出部8において、アームの各回転軸廻りの慣性項およびアームの加速方向を加味した重力項を求め、これらに所定の係数を乗算して和算し、さらにさらにこれとロボットアーム5の最大負荷姿勢時の許容最大加速度とを乗算した値を、最大負荷姿勢時の許容最大加速度に付加して、現在位置と目標位置での許容最大加速度を算出する。
(もっと読む)
多関節型ロボットの制御方法
【課題】 従来のオブザーバ制御演算装置では、ロボット自身の姿勢や、アームに取り付ける負荷に変化に対応し、制御性能の劣化を防ごうとすると、負荷イナーシャ、状態オブザーバ、状態FBのパラメータのリアルタイムでの演算が必要であり、演算処理の負荷が非常に多くなるという課題を有していた。
【解決手段】 アームに取り付けられる複数の負荷に対応して予め調整されたパラメータを持つ複数の状態オブザーバ並びに状態FBの演算を同時に行い、アームに取り付けられる負荷情報に基づいて、それぞれの状態FB値のモータ電流指令への加算量を調整する手段を備えることにより、リアルタイムで負荷イナーシャ、状態オブザーバ、状態FBのパラメータ演算を行う必要はなく、十分な振動抑制効果が得られる状態で、演算時間を削減することができる。
(もっと読む)
指令値生成装置
【課題】 各軸の速度制限を超過する可能性を抑制するとともに、過度な低速操作を無用として、高速円滑な操作を実現する指令値生成装置を得ることを目的とする。
【解決手段】 各軸(各関節)の速度制限を満たし、かつ規定の速度以下となる移動速度および移動量を算出する移動速度・移動量演算手段1、この移動速度・移動量演算手段1で算出した移動速度に対して加減速を考慮した修正を加える移動速度修正手段2、この移動速度修正手段2からの出力を平均化する加減速手段3、フラグ決定手段11からのフラグ情報に基づいて加減速手段3から出力される先端位置指令を各軸の位置指令に変換する逆変換を実施する逆変換手段A4、およびこの逆変換手段A4の出力をフラグ決定手段11からの出力に基づき補正して各軸の位置指令を出力する補正手段12を備えている。
(もっと読む)
ロボット移動制御方法
【課題】 ロボットの移動制御において、所望の動作経路を得るために試行錯誤的に教示内容を調整する作業負担を軽減するとともに、該試行錯誤的調整作業によるサイクルタイムの無用な増加を避ける。
【解決手段】 指定された始点TP4と少なくとも一つの中間点TP5,TP6と終点TP7とを通るように規定される教示経路に基づいて決定された滑らかな経路10,11に沿ってロボットを移動させる。このとき、始点TP4又は中間点の近傍では、ロボットが実際に移動する経路が教示経路と一致することを保証するようにする。
(もっと読む)
ロボットシミュレーション装置および方法
【課題】 オフライン教示によって作成した教示データをシミュレーションした場合、実際のロボットを動作させた場合と比較して動作時間が異なることがあり、設定した動作時間となるように教示データを修正する必要があった。
【解決手段】 従来のシミュレータ(モーションシミュレーション部)にサーボ演算とロボットダイナミクスを考慮したサーボシミュレーション部を接続し、シミュレーション統括部で全体のシミュレーションを同期させて制御するようにする。また、サーボシミュレーション部の位置決め完了信号をモーションシミュレーション部で処理するようにする。
(もっと読む)
サーボツール切離し/結合方法及びロボット制御装置
【課題】 サーボツールの切離し/結合に要する実質的な時間を短くして、ロボットの作業効率を向上させる。
【解決手段】 サーボツールの切離し位置への移動指令を出力(A1)。この移動の間、サーボツールのアンプへ停止指令の出力、動力線・信号線の断線エラーの無効化処理、サーボパラメータの無効化処理を開始する(A2)。電力供給停止を確認する(A3)。断線エラーの無効化処理、サーボパラメータの無効化処理の終了を確認する(A4)。ロボットが切離し位置に到達すると(A5)、サーボツールの機械的切離し処理を実行する(A6)。サーボツールの結合時も、機械的結合後の次の移動中に結合に必要なソフトウェア処理を実行する。ロボット移動中にサーボツールの切離し/結合に必要なソフトウェア処理がなされるから、サーボツールの切離し/結合処理が短い時間で行われ、ロボットの作業効率を向上させる。
(もっと読む)
61 - 80 / 87
[ Back to top ]