
Fターム[3C007MT02]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 制御、動作の高速化 (87)
Fターム[3C007MT02]に分類される特許
21 - 40 / 87
7軸多関節ロボットの制御方法及び制御プログラム
【課題】手首の位置を移動する際に7軸多関節ロボットの形態の急激な変化を抑制する。
【解決手段】7つの回転軸のうちのいずれか1つを冗長軸に、残りの回転軸のうちの3つを基軸に、かつ3つの基軸のうちのいずれか1つを変数軸に定め、かつ、基端から前記手首までの直線距離と基端に最も近い回転軸の延在方向における基端から手首までの距離とに基づく手首の位置と前記変数軸の関節角とに関して定式化された4次方程式を解いて手首の位置を3つの基軸の関節角に逆変換するステップを含み、電源オン時に、7軸多関節ロボットの初期形態に基づいて4つの第1求解演算式のうちいずれか1つを特定して記憶し、 電源オンの後、記憶した1つの第1求解演算式を用いて逆変換するステップを遂行して手首の目標位置から3つの基軸の関節角を算定し、それにより、7軸多関節ロボットの動作を制御する。
(もっと読む)
ロボットシステム、その制御装置及び方法

【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
水平多関節ロボットおよびそれを備えた搬送装置
【課題】直動機構を用いることなくワークを出し入れすることができると共に、高速動作が可能で、かつ、低発塵、省スペース化に寄与する水平多関節ロボットおよびそれを備えた搬送装置を提供すること。
【解決手段】エンドエフェクタ20、第1アーム30、第2アーム40に、さらに第3アーム50を備え、第3アーム50を揺動回転動作させることによって、例えば、アクセス位置P1の軸線P1aの延長線上に第3回転軸N3がくるようにしてから直線状にエンドエフェクタ20を移動させてワークの出し入れを行う。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
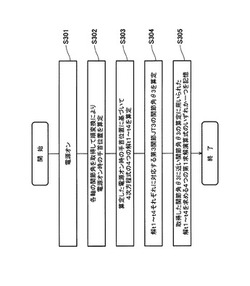
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物が検知されていない場合、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS1)。装置は、対象物が検知された場合、目標位置よりも対象物に近い位置を新たな目標位置として、新たな目標位置までの新たな経路を設定して、移動制御を切り替えるための切替条件が満たされるまでの間、新たな経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3及びS4)。装置は、切替条件が満たされた場合、視覚サーボ制御を実行する(ステップS5)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
ロボット制御システム、ロボット制御方法
【課題】高速かつ遅延の少ないデータ送受信をPCと動作制御装置との間で行うことができるロボット制御システムおよびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御システム1は、動作制御装置2と動作指示装置3を備え、動作制御装置2は、通信部201と、プロキシ部202と、プログラム記憶部203と、コントローラー統括部204と、プログラム実行部205と、ロボット制御部206とを備え、ロボット4が接続されている。動作指示装置3は、通信部301と、プロキシ部302と、データ読出・書込部303と、データ記憶部304と、プログラム部305と、入出力部306とを備え、画像表示装置5と入力装置6が接続されている。また、動作制御装置2と動作指示装置3は、LAN等のネットワークやUSB I/Fを介して接続している。
(もっと読む)
位置決め装置及び位置決め方法
【課題】被駆動体の電源遮断後における再起動時に位置の特定を必要とする最終出力端の現在位置を特定可能な位置決め装置及び位置決め方法を提供する。
【解決手段】被駆動体を減速機を介して駆動するモータ10と、減速機の被駆動体側出力軸に取り付けられ出力軸の回転位置を検出するアブソリュート型エンコーダ12と、モータの回転位置をパルスを介して検出するモータ側エンコーダ11と、電源投入によりモータを原点方向に動作させ、モータ側エンコーダの基準エンコーダパルスを出力させるパルス出力手段と、基準エンコーダパルスの位置におけるアブソリュート型エンコーダの現在値を読み取る現在値読み取り手段と、読み取った現在値と予め決められたモータの回転原点位置とからモータ回転数を演算するモータ回転数演算手段と、演算結果に基づき被駆動体の位置を検出する被駆動体位置検出手段とを備えている。
(もっと読む)
移動ロボット
【課題】物体を運搬するタスクにおいて、ロボットの駆動状態等によって使用する参照データを切り替えることにより、タスクの実行時間を短縮する。
【解決手段】ロボット10は、画像取得を行うためのカメラユニット1と、カメラユニット本体の位置・向きを変えることができる、首・車輪・脚などの駆動部2と、把持対象物認識を行うために駆動部2を制御するロボット制御部3と、カメラユニット1により取得された画像の処理を行う画像処理部4と画像処理を行うための対象物データを登録・格納する認識対象物データベース部5を有しており、駆動部2の状態等によって、参照データ51として特徴の情報量の多いものと少ないもの等、少なくとも2ケース以上用意されたデータについて、いずれを使用するか決定して切り替えを行い、ロボットが移動中でも効率的に対象物認識を行う。
(もっと読む)
搬送ロボット装置
【課題】搬送全工程の所要時間を短縮することができる搬送ロボット装置を提供する。
【解決手段】制御装置と、この制御装置とのハンドシェイクにより指示されるコマンドに対応した処理を実行可能であって、現コマンドの実行中に並行して次のコマンドを読み込み、これを、現コマンドに引き続いて実行する搬送ロボットとを備えた搬送ロボット装置とする。この場合、現コマンドの実行中に並行して次のコマンドが読み込まれ、その後実行される、という過程が順次行われることにより、一度のハンドシェイクで複数コマンドを連続して実行することができる。
(もっと読む)
基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する場合の搬送経路の選択肢を増やし、これにより搬送時間の最短経路を選択することを可能にさせる。
【解決手段】基板搬送用ロボットのコントローラが、複数の教示位置が教示された際、教示位置の各々に対するアクセス待機位置11を生成し、アクセス待機位置11から基板搬送用ロボットの最小旋回姿勢12までの複数の経路を生成して記憶する。
(もっと読む)
モーション制御用指令システム、モーション制御用指令方法およびモーション制御システム
【課題】 安価で簡単な低速通信を使って段差なく滑らかな制御を実現でき、高速通信の場合と同等以上の制御性能を発揮できるモーション制御用指令システムを提供すること。
【解決手段】 モーション制御用指令システム1は、マスター制御装置2からその受信先装置であるスレーブ制御装置4に制御指令データCDを伝達するためのマスター制御装置2搭載のデータ送信手段3と、スレーブ制御装置4搭載のデータ受信手段5と、両制御装置2、4を結ぶデータ伝送経路8とからなり、制御指令データCDと同時にその処理に要すべき時間のデータ、つまり制御指令更新周期データTDも通信されるように形成されたシステムである。補間周期データTDはマスター制御装置2においてその都度生成され、制御指令データCDと一緒にスレーブ制御装置4側に送信される。
(もっと読む)
バラ積みピッキング装置とその制御方法
【課題】乱雑に重なり合って置かれた複数のワークの計測時間を大幅に短縮してピッキング時間を短縮できるバラ積みピッキング装置とその制御方法を提供する。
【解決手段】(A)レーザスキャナとカメラにより距離データと画像データをそれぞれ取得し、これから複数のワークの3次元位置と姿勢を認識して記憶しS1、S2、(B)複数のワークのうちピッキング可能なワークを決定してそれをピッキングしS4、S5、(C)ピッキング後に画像データのみを再取得してS2、直前の画像データと比較して位置と姿勢の変化が許容範囲内のワークの有無を判断しS6、S4、(D)許容範囲内のワークが存在する場合にそのワークをピッキング(S5)して(C)に戻り、(E)許容範囲内のワークが存在しない場合に、(A)に戻り再度距離データを取得する。計測時間を要するレーザスキャナからのデータ取得回数を減らして、ピッキング時間を短縮する。
(もっと読む)
搬送システム及び自動化製造システム
【課題】
従来の自動化製造システムでは、ガントリ形の水平・垂直移動装置と多関節形ロボットを同時に動かしている。ガントリ形の水平・垂直移動装置の移動速度は多関節形ロボットの移動速度よりも非常に遅く,これら2つを組み合わせて同時に動かすと,遅い方のガントリ形の水平・垂直移動装置の移動速度により全体の搬送速度が決まってしまうという問題がある。
【解決手段】
搬送システム50は被搬送物であるHDD100を搬送するために、垂直移動と水平移動ができるガントリ52と、ガントリ52に設置されたロボットハンドラ62が手先についた多関節形ロボット60を有する。多関節形ロボット60の現在位置における作業範囲内で、取り出し、搬送、設置の一連の搬送作業が行えるHDD100を優先して選択し、前記作業範囲内での搬送作業においては、ガントリ52を動かさず、多関節形ロボット60で搬送する。
(もっと読む)
ロボットオフライン表示装置
【課題】効率的に干渉チェックを行うことができるロボットオフライン表示装置を提供する。
【解決手段】ステップS3において、干渉チェックを行うべきロボットの位置姿勢についての干渉チェック結果が存在していれば、ステップS4に進んで当該干渉チェック結果を採用する。また干渉チェックを行うべきロボットの位置姿勢と同一の位置姿勢が過去のデータに含まれていない場合でも、周辺機器との干渉チェックの結果が記録されているロボットの位置姿勢の中に、干渉チェックを行いたいロボットの位置姿勢との差分が指定範囲内のものがあれば、その干渉チェック結果を採用する。
(もっと読む)
サイクルタイム短縮のためのロボットの移動制御装置及び移動制御方法
【課題】面倒な試行錯誤をせずにロボットのサイクルタイムを効率的に短くすることができるロボットの移動制御装置及び移動制御方法を提供する。
【解決手段】移動時間初期値を使用したサイクルタイム(M0+Fc)の方がクランプ処理後のサイクルタイム(Mc+Fc)より短い場合は、新たな移動時間Mnewを計算し、これに基づいて新たな指令速度Vnewを計算する。このようにして得られた移動時間Mnew、指令速度Vnew及び時定数Fcが最終的な移動時間、指令速度及び時定数となり、サイクルタイムの短縮化が図られる。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】生産サイクルタイムのロスをより確実に低減できるロボットの制御装置を提供する。
【解決手段】制御装置は、所定位置に配置されたパレット56について、ロボット51のアーム54が右手系,左手系の各制御系列により動作可能となる領域を計算し、パレット56に対するワーク供給又は取出し位置Pwを基準に初期作業位置を決定すると、その初期作業位置からロボット51が順次作業を進める位置をパレット56内で決定する。そして、アーム54の現在位置Pl(n)に隣接する作業位置が同じ制御系列で作業可能であればその位置を優先して次の作業位置とし、同じ制御系列では作業不可であればそれ以外に継続して作業可能な位置があれば当該位置での作業を同じ制御系列で行い、前記位置がなければ異なる制御系列で作業可能な位置を次の作業位置とする。
(もっと読む)
移動型ロボット
【課題】ロボットの動作、実行タスク又は認識対象に対応でき、認識対象の認識精度を高くすると共に画像処理での演算量の増加を抑える移動型ロボットを提供する。
【解決手段】視覚センサC,Cが取得した撮影画像を画像処理し、撮影画像に含まれる対象に関する認識情報を生成する画像処理部10と、画像処理部10が生成した認識情報に基づいて統括制御を行う主制御部40と、を備えるロボットRであって、画像処理部10は、複数解像度画像生成部11と、低解像度画像処理部12と、所定の入力情報又は予め設定したルールに基づいて、高解像度画像を画像処理するか否かを判定すると共に、何れの解像度の高解像度画像を画像処理するかを判定し、低解像度画像の一部に解像度処理領域を設定する画像処理判定部13と、高解像度画像処理部14と、画像処理結果統合部15と、を備える。
(もっと読む)
ロボットの動作経路生成装置
【課題】拘束条件を満たしかつ様々な評価条件の最適化を図ることが可能な関節ロボットの動作経路を生成することができるロボットの動作経路生成装置を提供することを課題とする。
【解決手段】力学的拘束を伴う関節ロボットの動作経路を生成するロボットの動作経路生成装置1であって、ロボットの拘束条件を取得する拘束条件取得手段3と、ロボットの評価条件を取得する評価条件取得手段3と、拘束条件を満たすロボットの姿勢を複数生成する姿勢生成手段5と、評価条件に基づいて姿勢生成手段5で生成した複数の姿勢をそれぞれ評価する姿勢評価手段6と、姿勢生成手段5で生成した複数の姿勢の中から姿勢評価手段6での評価結果に基づいて姿勢を選択する姿勢選択手段6と、姿勢選択手段6で選択した姿勢を用いてロボットの動作経路を生成する動作経路生成手段7とを備えることを特徴とする。
(もっと読む)
移動ロボットの駆動装置
【課題】安全性を考慮した低電圧要求と高速移動のための高電圧要求とを共に満足し、よって効率的に電圧を供給するようにした移動ロボットの駆動装置を提供する。
【解決手段】関節を介して連結される複数本のリンク(大腿リンクなど)の関節に配置される電動モータ(1Yモータ42,2Yモータ46など)と、複数本のリンク以外の部位に配置される電源(バッテリ)28と、電源と電動モータを接続する電力線90を通じて電源から供給される電圧を通電指令に応じて電動モータに供給して駆動する駆動回路(モータドライバ92)とを備えた移動ロボットの駆動装置において、電動モータに供給される駆動電圧を昇圧する昇圧器98を備えると共に、電動モータと昇圧器と駆動回路とを同一のリンク(大腿リンクなど)に配置する。
(もっと読む)
21 - 40 / 87
[ Back to top ]