
Fターム[3C007NS26]の内容
マニピュレータ、ロボット (46,145) | ワークの状態 (1,085) | 種類 (720) | 食品 (13)
Fターム[3C007NS26]に分類される特許
1 - 13 / 13
立体視ロボットピッキング装置
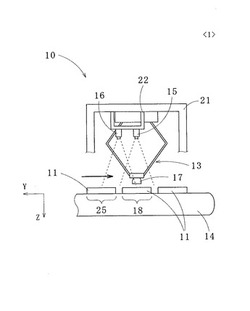
【課題】カメラとワークの間隔が長くなるのを抑制し、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供する。
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
(もっと読む)
ロボットハンド装置

【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
ロボットハンド
【課題】食製品の外周面を面接触によって均等に保持することのできるロボットハンドを提供する。
【解決手段】食製品5を保持自在なロボットハンドであって、ロボットハンド19におけるハンド支持部材29に互いに開閉自在に備えられた複数の開閉作動部材71を設け、各開閉作動部材71の開閉動作によって互いに中央部に集合する各開閉作動部材の集合端側に、食製品5を保持するためのフィンガ部材79を、前記ハンド支持部材29から下方向へ突出して備え、前記各フィンガ部材79が前記食製品5を保持する保持面77に、隣接したフィンガ部材79を摺動自在に接触して、前記各フィンガ部材79における前記保持面77によって囲繞して食製品5の周囲を面接触によって保持するための保持空間83を備えている。前記各開閉作動部材71が開閉動作する中央部に対応して、前記各フィンガ部材79の前記保持面77を清掃するための清掃手段を前記ハンド支持部材29に備えている。
(もっと読む)
保持部材
【課題】ロボットハンドにおいて食製品を保持する保持部材を提供する。
【解決手段】食製品を保持するためにロボットハンドに開閉自在に備えられる保持部材であって、ロボットハンド19におけるハンド支持部材29に開閉自在に支持される開閉作動部71と、この開閉作動部71の先端側において当該開閉作動部71の開閉作動方向に対して交差する方向へ突出して備えられたフィンガ部79と、前記食製品5を保持するために前記フィンガ部79に形成され、かつ隣接して備えられる別個のフィンガ部79と摺接すると共に食製品を囲繞する保持空間を形成するための保持面77とを備えている。
(もっと読む)
アクチュエータ及び把持装置
【課題】構造が簡単で製造コストが安価であり、狭い場所にも適用可能な把持装置を提供すること。
【解決手段】1対の把持指の各々について、少なくとも端部が重なるように配置し連結された2枚以上の金属薄板1と、この連結側端部6の反対側端部において金属薄板を金属薄板の長さ方向に対して垂直に往復動させ、把持指の連結側端部を、応力作用により揺動動作させる手段を設けること特徴とする。この揺動動作により、把持対象物を抱き込み、確実に把持できる。
(もっと読む)
把持装置
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
真空把持装置
把持器は、パッケージされ、加工され、あるいは原料のままのものを持ち上げるとともに保持するために、不規則で変形可能な加工中の製品をつかみ、素材ハンドリング、組み立て、パッケージング、および他のロボットおよび自動化された操作機能の目的で、前記加工中の製品を操作する。真空は、加工中の製品についての持ち上げ力を提供する柔軟把持フードを通じて、複数のポイントで誘導され、加工中の製品の迅速な移動を促進する。照明装置のアレイおよび分割されたミラーの二重リングアレイは、操作される前記加工中の製品に対しての前記把持フードの正確な位置合わせを確実なものとする、均一な照明を提供する。 (もっと読む)
運搬システム
【課題】
到着位置に誤差の生じるロボットへの運搬物搭載を、人手を介さずに行うことができるシステムを提供することを目的とする。
【解決手段】
運搬システムにおける計算機は、キャリブレーション用の第一のトレーを、カメラを制御して撮影する撮影部と、撮影部が撮影した撮影画像中の、第一のトレーのトレー位置を算出するトレー位置算出部と、ハンドロボットが第一のトレーにキャリブレーション用の第一の運搬物を搭載するときの、当該ハンドロボットの位置を示すハンド位置を取得するハンド位置取得部と、トレー位置及びハンド位置に基づいて、キャリブレーションデータを算出するキャリブレーション部と、移動ロボットが、到着予定領域に到着したとき、キャリブレーションデータに基づいて、当該移動ロボットが備える第二のトレーに、第二の運搬物を搭載するよう、ハンドロボットを制御する運搬物搭載部を備える。
(もっと読む)
移載方法及びその装置
【課題】移載本体と、支持板材の対向する移載ユニット側となる作用面側から先端部を折り返して非作用面側を経て後端部で折り返して巻回配置された被移載物を移載可能な移載ベルトと、移載ベルトの作用面側の部位を移載本体に固定可能な固定機構と、支持板材を進退移動させる進退機構とを備えてなるから、簡素な構造とすることができる。
【解決手段】各移載ユニットTは、それぞれ、移載本体1と、支持板材3の対向する移載ユニット側となる作用面3b側から先端部3aを折り返して非作用面3d側を経て後端部3cで折り返して巻回配置された被移載物Wを移載可能な移載ベルト4と、移載ベルトの作用面側の部位を移載本体に固定可能な固定機構5と、支持板材を進退移動させる進退機構6とを備えてなる。
(もっと読む)
移載方法及びその装置
【課題】支持板材を進退機構により進退移動させることにより移載ベルトの支持板材の作用面側により被移載物を移載することができ、この移載により、移載ベルトと被移載物との間での摩擦は生じないので被移載物を傷つけたりすることがなく、柔軟性や難掴持性の被移載物を容易に移載することができると共に複雑な機構を採用することがなく、簡素な構造とすることができる。
【解決手段】移載本体1と、支持板材3の作用面3b側から先端部3aを折り返して非作用面側3dを経て後端部3cで折り返して巻回配置された被移載物Wを移載可能な移載ベルト4と、移載ベルトの作用面側の部位を移載本体に固定可能な固定機構5と、支持板材を進退移動させる進退機構6とを備えてなる。
(もっと読む)
貫通可能な対象物を把持し、保持し更に開放するための装置及び方法
本発明は、貫通可能である、対象物(30)を把持し、保持し更に開放するための装置に関する。装置は、お互いから所定の距離で設置された針の長手方向において、中心軸線を有する少なくとも2つの針(1,2)を具備する。少なくとも1つの駆動ユニットは、針(1,2)に接続して、これらの針を伸張位置と収縮位置との間で駆動する。針の中心軸線の少なくとも1つは、この針が伸張位置にある場合に、円の一部を形成する。更に本発明は、貫通可能である、対象物(30)を把持し、保持し更に開放するための方法を開示する。  (もっと読む)
(もっと読む)
イチゴ挟着具及びそれを用いたイチゴ自動収容装置
【課題】 更にイチゴの損傷を減少でき、より簡単な構造で、修理や点検等も容易なイチゴ挟着具及びイチゴ自動収容装置を提供する。
【解決手段】 開閉式の二つの挟着片でイチゴの蔓を挟着把持してそのイチゴを容器へ収容し、収容後に挟着を開放するイチゴ挟着具200において、二つの挟着片にイチゴの蔓を挟着する蔓挟着部220と、イチゴの上部(肩部)を支持してイチゴを容器へ収容するのに適した姿勢に保持する肩支持部221を有する。イチゴ挟着具の二つの挟着片を開閉操作して二つの挟着片の蔓挟着部でイチゴの蔓を開閉操作すると共に肩支持部をも開閉操作する操作部を備えた。このイチゴ挟着具を、往復移動手段によりイチゴ供給部側と容器側とにイチゴ挟着具を往復移動させて、イチゴを容器に自動的に整列収容するイチゴ収容装置に備えた。
(もっと読む)
刺し込むことのできる対象物の把持装置及びその方法
本発明は、刺し込むことのできる対象物を把持するための把持装置に関するものであって、お互いに角度をつけて配置された少なくとも二つの針(2)と、前記針(2)を延伸位置と引き込み位置との間で長手方向に作動するために前記針(2)に接続された駆動ユニット(3)とを含んでいる把持装置において:前記駆動ユニット(3)を取り付けるためのツールブロック(1)が、剛な接触面(8)を含んでいて、前記針は前記延伸位置と前記引き込み位置との間で前記ツールブロック(1)を出入りするように作動されるようになっていて;そして前記ツールブロック(1)が前記ツールブロック(1)の中に設置された針(2)用のガイド(2a)を含んでいて、前記針は前記延伸位置において交差部分(9)を形成するようになっていることを特徴としている。さらに刺し込むことのできる対象物の把持方法にも関する。  (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]