
Fターム[3C007WC11]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | 利用方法 (187)
Fターム[3C007WC11]の下位に属するFターム
ゲーム (5)
癒すもの (7)
アカデミックな利用 (1)
付加機能付き(例;電話、FAX) (10)
監視、警備 (42)
Fターム[3C007WC11]に分類される特許
1 - 20 / 122
カメラシステムおよびその制御方法
【課題】高操作性を確保しつつ、ミスコミュニケーションの発生を軽減することができないという問題を解決することが可能なカメラシステムを提供する。
【解決手段】画像処理部16は、カメラ11で撮像された撮像画像に対して、その撮像画像内の所定領域を加工する画像処理を行って、加工画像を生成する。表示部は、加工画像を表示する。操作部は、カメラの向きを示す操作コマンドを受け付ける。モータ制御部18は、操作コマンドに応じてカメラ11の向きを調整する。
(もっと読む)
ロボット装置

【課題】頭部の高さを低く抑えたままで広い認識可視領域を確保可能なロボット装置を提供すること。
【解決手段】ロボット1は、胴体2と、胴体2の上部に連結された首関節機構4と、首関節機構4により支持された頭部5と、頭部5の前面に配置された認識部6と、を備える。首関節機構4は、胴体2の上面に対する水平方向を長軸とし、胴体2の上面に対する垂直方向を短軸とする楕円形の軌道に沿って、頭部5を移動させることを特徴とする。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
給仕サービスのためのロボットシステム
【課題】複数台の移動型ロボットを合理的に運用して省エネルギのもとに質の高い給仕サービスを提供すること。
【解決手段】各移動型ロボット100の状態情報に基づいて移動型ロボット100が調理物引渡場所14に到着できる時刻を予測演算し、予測演算された各移動型ロボット100の到着時刻のうち最も到達時刻が早い一台の移動型ロボット100を選択して当該移動型ロボット100に調理物配達を実行させる処理を行う。
(もっと読む)
ロボット、及びその制御方法
【課題】被誘導者を適切に誘導することができるロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様にかかるロボットは、ハンドを有する腕部と、脚部と、胴体部と、を有し、人201を誘導して移動するロボットであって、所定のロボット位置におけるハンドの目標位置とハンドの測定位置との偏差に応じて、ロボットに対する被誘導者の追従状態を推定する追従状態推定部136と、追従状態の推定結果に応じて、ロボットの移動速度を調整する歩行調整部137と、歩行調整部137によって調整された移動速度に応じて前記ロボットを移動させるよう、脚部を駆動する駆動制御部138と、を備えたものである。
(もっと読む)
サービス提供装置、サービス提供プログラム及びサービスロボット
【課題】サービス対象者を適切に選択することを課題とする。
【解決手段】サービス提供装置1は、移動情報取得部2と、干渉判定部3と、サービス対象者選択部4とを有する。移動情報取得部2は、自装置を基準として規定される第1の領域に存在する複数の人の移動方向及び移動速度を取得する。さらに、干渉判定部3は、移動情報取得部2によって取得された複数の人の移動方向及び移動速度からそれぞれ推定される人の移動推定軌跡が第1の領域よりも小さく、かつ自装置を基準として規定される第2の領域へ干渉するか否かを判定する。サービス対象者選択部4は、自装置がサービスを提供するサービス対象者として、干渉判定部3によって移動推定軌跡が第2の領域へ干渉すると判定された人を選択する。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】ユーザとのインタラクションを介してロボットの周辺情報を更新し、ロボットへの指示を簡便化する。
【解決手段】制御装置100は、移動体に所定の処理を実行させる実行部108と、前記移動体が移動可能な領域の環境地図を記憶している記憶部104と、前記移動体の周辺情報を検出する検出部102と、前記検出部により検出された前記移動体の周辺情報に基づいて、前記環境地図を更新する更新部106と、ユーザ入力に応じて、ユーザの指示を示す指示情報を取得する取得部110と、を備え、前記実行部108は、前記環境地図を参照して、前記移動体に前記指示情報に基づく処理を実行させ、前記更新部106は、前記指示情報および前記指示情報に基づく前記移動体により実行される処理をもとに前記環境地図を更新する。
(もっと読む)
作業用装置
【課題】可動部位を含む作業機において、実際に作業機を動かす前に作業機のどの部位が作動するか、または、どのように作動するかを瞬時に把握した後、同一の操作で速やかに作業機を作動させ、操作性を向上することができる作業用装置を提供する。
【解決手段】操作手段の所定量未満の第1の操作量の操作を行うと、アクチュエータの駆動によって作動する部材に対応付けられた部位を、実際に作動する部材を作動させるときと同一の操作を行うことによって、いずれの部材が作動するか、または、どのように作動するのかを画像表示部220に識別表示し、操作手段の所定量以上の第2の操作量の操作で、前記識別表示した部位に対応する部材を作動させる。
(もっと読む)
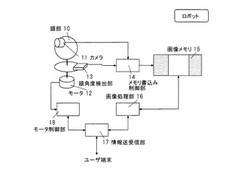
ロボット操作装置
【課題】遠隔コミュニケーションが行われるシステムにおいて、簡易な設備でユーザに負担を掛けることなくロボットが自然な身体動作を行うようにすることができるようにする。
【解決手段】ロボット操作装置は、ロボット20が存在する空間を撮像した映像を入力する映像入力部11と、映像入力部11が入力した映像を、ロボット20の頭部等の部位21の志向に対応する画像の部分から遠くなるほど解像度を下げるように加工する映像加工部12と、映像加工部12が加工した映像を表示器15に表示する映像表示部13と、表示器15に表示された映像におけるユーザが指定した位置を向くように部位21を移動させる命令を発行する映像位置指定部14とを備えている。
(もっと読む)
ユーザ支援システム
【課題】ユーザによる機器の操作を適切に支援すること。
【解決手段】ユーザ支援システムは、ユーザが操作する機器と、上記ユーザによる上記機器の操作を支援する処理を実行する支援装置と、上記ユーザの位置と姿勢を表すユーザ情報を取得するユーザ情報取得手段と、上記機器の位置と姿勢を表す機器情報を取得する機器情報取得手段と、上記機器の作動状態を表す作動状態情報を取得する作動状態情報取得手段と、を備え、上記支援装置は、支援装置自体の位置と姿勢のうち少なくとも一方が変化するよう可動する可動部を有している。さらに、上記ユーザ支援システムは、上記作動状態情報の履歴の変化に応じて、上記ユーザ情報と上記機器情報に基づいて上記支援装置による上記ユーザに対する支援処理が実行可能となるよう上記可動部の動作を制御すると共に、上記支援装置による支援処理を実行するよう制御する支援装置制御手段を備えた。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
料理プロセス指示装置及び料理プロセス指示方法
【課題】料理タスクを実行するロボットに対して料理プロセスを簡単な方法で指示することが可能な技術を提供する。
【解決手段】少なくとも材料の投入、材料の混ぜ又は返し、及び、材料の加熱を含む、複数の料理タスクを実行するロボットに対して、料理プロセスを指示するための料理プロセス指示装置であって、前記各料理タスクに対応するアイコンと、前記アイコンを並べるための時間軸と、を表示し、ユーザにポインティングデバイスの操作で前記アイコンを前記時間軸上に並べさせる料理プロセス入力部と、前記料理プロセス入力部において前記時間軸上に並べられた前記アイコンの種類及び位置に基づいて、前記ロボットに該並べられたアイコンに対応する料理タスクを実行させる順番及びタイミングと前記ロボットに該料理タスクを実行させるための動作とを計算し、前記ロボットに対して制御命令を送出する制御部と、を備える。
(もっと読む)
ロボットシステム
【課題】カメラをハンドに内蔵しながらも、より広範囲にある物品を検出して把持することができるロボットシステムを提供する。
【解決手段】物品を把持するハンドと、ハンドを回転駆動させるアームと、ロボットの動作を制御するコントローラと、ハンドに内蔵され、アームにより回転されるハンドの回転軸に対して撮像方向がオフセットするように配設されたカメラと、カメラにより取得された画像情報を処理してコントローラに信号を送信する画像処理装置と、を有して構成する。
(もっと読む)
救助ロボット
【課題】簡単な構造で、要救助者を確実かつ円滑に救助し、救出時間の短縮を図る。
【解決手段】救助ロボットは2機のクローラ5、6にそれぞれ、2台のコンベア8、9が分割配置され、要救助者の救出に際して、前側のコンベア8をクローラ5の進行方向前方の走行面に向けて前進傾動させ、各クローラ5、6の低速の前進走行とともに各コンベア8、9を各クローラの走行方向とは反対方向に各クローラの走行速度と同期させて回転駆動し、前側のコンベア8の先端を要救助者が居る地点の要救助者の接触面と要救助者の身体との間に潜り込ませて当該要救助者を前後の各コンベア8、9上に引き上げ収容する。
(もっと読む)
テルミン演奏ロボット
【課題】テルミンの特性モデルを有し、演奏前に特性モデルのキャリブレーションを行うことで、テルミン演奏環境に則した演奏を行うことができる、テルミン演奏ロボットを提供する。
【解決手段】第1のアーム12と第2のアーム11と、テルミンの音高に対応するアーム位置を示す音高モデルを有し、演奏目標の音符と音高モデルとに基づいて音符に対応したアーム位置へ第1のアーム12を移動させてテルミンを演奏するロボット10であって、テルミンの周囲の環境によって変化する音高モデルのパラメータを調整するパラメータ調整部50を備えている。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は生体信号の検出感度に応じたパラメータに補正することを課題とする。
【解決手段】動作補助装置10のキャリブレーション制御手段162は、装着者12が動作補助装着具を装着したときに、負荷発生手段164により電力増幅手段158に対して駆動源140からの駆動力を負荷(入力トルク)として装着者12に付与させる。そして、駆動源140からの駆動力を付与された装着者12は、予め決められた所定キャリブレーション動作を行って骨格筋から力を発生させる。これにより、上記キャリブレーション動作に伴って物理現象検出手段142が関節角度を検出し、生体信号検出手段144が筋電位信号を検出する。パラメータ補正手段156では、フェーズ特定手段152によって特定されたフェーズにおける差分導出手段154によって算出された負荷(入力トルク)と駆動力(筋力)との差に基づいてパラメータKを補正する。
(もっと読む)
展示品説明ロボット及びロボットを使用した展示品説明方法
【課題】説明に係る箇所を指し示すことで視覚的に説明部位を把握し易くし、さらにこのような現物上での指示と音声解説とをリンクさせる。
【解決手段】所望の方向へ移動するための自走手段11と、予め記録された所定の展示品に関する説明を音声で再生するための音声案内手段14と、展示品をレーザポインタ21で指示可能なレーザ指示装置2に対して、所定の展示品の特定の部位にレーザ光を照射するよう命令するための命令手段16と、自走手段11で所定の説明位置まで移動するタイミングと、命令手段16がレーザ指示装置2に対して、所定の展示品へのレーザ光照射命令を発するタイミングと、音声案内手段14で所定の展示品に関する説明の音声を再生するタイミングとを、予め決められた順番で相互に対応させながら実行する手順を記録した記憶手段15とを備える。
(もっと読む)
案内ロボット
【構成】 案内ロボット10は、擬人的な姿を有する人間型ロボットであり、イベント会場などに配置されて、人間を先導して目的地まで案内する案内サービスを提供する。案内ロボット10は、タスク設定手段(62,66,S1)を備え、不特定多数の人間を対象とする案内タスクを実行するときには、体の向きを後ろ方向に向けた状態で移動する。
【効果】 後ろ方向を向いた状態で移動するので、人間の関心を惹きつけながらの案内が可能となる。したがって、無関係の人間が合流し易くなり、より多くの人間を集めて目的地まで案内できる。
(もっと読む)
1 - 20 / 122
[ Back to top ]