
Fターム[3C030BC02]の内容
Fターム[3C030BC02]の下位に属するFターム
吸着位置の矯正部材 (5)
Fターム[3C030BC02]に分類される特許
101 - 109 / 109
ワーク取出し装置およびワーク取出し方法
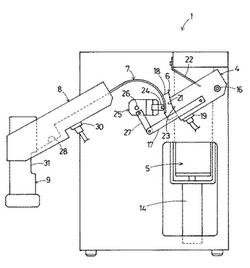
【課題】所定個数のワークを確実かつ簡単に取り出し、作業効率を大幅に向上させることができる取り出し装置を提供する。
【解決手段】ワーク取出し装置1のホッパーに溜まっているワークを第一昇降板の受止面に少数個受止して持ち上げ、昇降動作の上死点で第一昇降板の受止面から固定板の受止面に移乗させ、昇降動作の下死点で固定板の受止面から第二昇降板の受止面に移乗させ、再び昇降動作の上死点で第二昇降板の受止面から第一シューター4に供給し、第一シューター4の回動の上死点でワーク2を一個ずつ移乗台部6の上端移乗面18に転落移乗させ、回動アーム25のマグネット24で磁着して円弧状搬送ガイド7上を第二シューター8側に搬送し、受取り筒9を持ち上げて開口部31を介して受取り筒9内に転落させて所定個数のワークを取り出す。
(もっと読む)
塗料フィルムの車体部分への自動貼付方法及び装置、及び引き伸ばされた粘着性ストリップの利用
本発明は複合フィルムの中に組み込まれた塗料フィルムの、車体部分へのロボットでガイドされる貼付工具を用いた自動貼付のための方法及び装置に関する。粘着側保護片は組み込まれた工具によって引き離され、引き伸ばされたフィルムブランクは工具に組み込まれた状態で、可視側の保護片の存在下で貼付位置の上からブレードにより車体部分に貼付される。2層の複合フィルム及び、従って単純な貼付工具のみを使用するために、個々に、硬い基材上に強制的に平らに配置された複合フィルムは、本発明によれば、工具に組み込まれた方式でローラに格納され再び使用後に該工具内に巻き取られることができる、粘着性ストリップによって捕捉され、それにより該粘着性ストリップは工具に組み込まれた方式でブレードによって複合フィルム上へ貼付されることが可能である。運ばれた塗料フィルムブランクはそのとき粘着側が露出された後に車体部分に貼付される。粘着性ストリップは保護片として使用される。粘着性ストリップは次に、貼付された塗料フィルムから引き離される。前記ストリップはその結果、貼付工具内でのその後の貼付プロセスにおいて再び使用できる。粘着性ストリップの実作業部分は繰り返し使用の後、工具内で自動的に更新可能である。  (もっと読む)
(もっと読む)
レンズモジュール組立装置及びその方法

【課題】 部品の供給から組立を自動化して、製品の安定供給と組立時間の短縮とを実現可能としたレンズモジュール組立装置を得る。
【解決手段】 搬送ユニットにより所定の工程から次の工程へバレル(鏡筒)の搬送を行いつつ、少なくともレンズ、絞りの各部品を工程順に鏡筒内に組込んでレンズモジュールとする場合に、バレルを搬送ユニット21の搬送ライン上に載置するバレル供給ユニット11と、バレル内への第1レンズ組込ユニット12と、バレル内への絞り組込ユニット13と、バレル内への第2レンズ組込ユニット14と、バレルへの接着剤塗布ユニット15と、接着剤硬化のためのUV照射ユニット16とを、この順に設けておき、これら全ての工程を同時に行うと共に、搬送ユニット21により、これら各工程を連続して行うようにする。
(もっと読む)
シート部材の組付け方法
【課題】2台のロボットを用いてシート部材の組付けを行うと共に、被組付け物の位置を力覚センサを用いて検出できるようにして、設備費の大幅な削減を図る。
【解決手段】2台のロボットの動作端に取付けた第1と第2の2つの治具11,21によりシート部材2を保持する。両治具11,21を接近させてシート部材2を弛ませた状態で、第1治具11に設けたピン16を被組付け物1の基準孔に押し込み、第1治具11とロボットの動作端との間に介設した力覚センサで検出される位置検出ピンの押し込み反力に基づいて第1治具11の位置を修正し、位置検出ピン16が基準孔に同心で挿入されたときの第1治具11の位置に基づいて被組付け物1の位置を検出する。検出された被組付け物1の位置に基づいて第1と第2の両治具11,21を被組付け物1に対し位置合わせし、被組付け物1にシート部材2を組付ける。
(もっと読む)
組付方法及びその装置
【課題】 大きな組付荷重に対しても組付部の変形等を生じることなく、小型・軽量で簡素な組付部構造とすることが可能な組付方法及びその装置を提供する。
【解決手段】 組付装置1は、被組付物10に部品11を組み付ける組付部3が、上下方向だけに移動可能に構成され、搬送部4が水平面内を2次元に移動するように構成されている。組付装置本体2に水平移動可能に支持される部品供給部5は搬送部4によって駆動される。搬送部は、被組付物を保持し移動させるグリッパ6と、グリッパを移動可能に保持する伝達部7と、伝達部を一軸方向に移動可能に保持する搬送部本体8と、伝達部を移動させる駆動部9とからなる。
(もっと読む)
光学部品の位置決め装置
【課題】 光学部品のハンドリングと位置決めとを高精度に実現することができる光学部品の位置決め装置を提供すること。
【解決手段】 光学部品の位置決め装置1は、軸方向に延びて配されたハンド本体3と、レンズ2を吸着する透明で筒形状の吸着部材5と、レンズ2を保持させるために供給される吸引力を吸着部材5に伝達する吸引流路6と、吸着部材5及び吸引流路6とを介して吸着されるレンズ2と対向してハンド本体3の反対側に配された透明部材7とを有するハンド(搬送部)8と、透明部材7及び吸引流路6を介してレンズ2を照射するように配された照明部10と、照明部10と対向して配された第一画像処理用カメラ(観察部)11と、第一画像処理用カメラ11の観察結果に基づいて吸着部材5に保持されたレンズ2を所定の位置に位置決めする位置決め部とを備えている。
(もっと読む)
嵌め込み装置および嵌め込み手段および嵌め込み方法
【課題】 嵌入孔や組み付け部品が比較的複雑な形状の場合や、2つの組み付け部品を同時に嵌入孔に嵌め込む場合などにおいても、迅速かつ精度のよい部品の嵌め込みをおこなうことのできる嵌め込み装置および嵌め込み手段および嵌め込み方法を提供する。
【解決手段】 組み付け部品93aを収容するための一端が開放した収容空間25を有する筒体2と、該筒体2の軸線方向に相対的に移動することのできる軸部材3と、軸部材3の内部に設けられた貫通孔31と連通する配管83と、配管83が繋がる負圧発生源82aとから嵌め込み装置1が構成される。ロボットハンドのチャック爪81aで軸部材3を把持し、貫通孔31の一端32でプラグ32aを負圧吸引しながら収容空間25内に収容し、スプールバルブ93bの頭部をガイドにしながら軸部材3を押し込むことにより、プラグ93aの嵌め込みをおこなうことができる。
(もっと読む)
部品組付方法及び部品組付装置
【課題】 部品組付方法及び部品組付装置において、部品を人手を介さずに容易に保持し、汎用性を高め、設備のコストを抑え、部品の組付精度を高めることにある。
【解決手段】 ドアにアウタモール13、ドアモール等の長尺部品を組み付ける方法であって、所定の位置に置かれた部品を吸着保持する工程と、部品を吸着保持した状態でドアの所定箇所に搬送する工程と、部品を吸着保持した状態で三次元的に位置決めしながらドアに組み付ける工程と、から構成した。
(もっと読む)
接着接合によって、小さい部品を取り付け表面に締結するための締結装置
部品と取り付け表面との間に接着接合を形成する加熱活性化接着剤を用いて、小さい部品、特定的には接着フランジ(29)が設けられたスタッド(28)を、取り付け表面(34)に締結するための締結装置が、部品及び/又は接着剤を加熱するための誘導コイル(3)と、締結装置が接合位置に移動する間、部品を保持する保持機構(4)とを有する。
部品を外側からもたらすことができる該部品のための座面(30)が、取り付け表面に面する側に設けられる。保持装置(4)は、誘導コイル(3)によって部品まで前進させることができ、座面の方向に向けられる保持力を生成するための電磁石を有する。  (もっと読む)
(もっと読む)
101 - 109 / 109
[ Back to top ]