
Fターム[3C030BC02]の内容
Fターム[3C030BC02]の下位に属するFターム
吸着位置の矯正部材 (5)
Fターム[3C030BC02]に分類される特許
41 - 60 / 109
ウィンドウガラスの取付装置及び取付方法
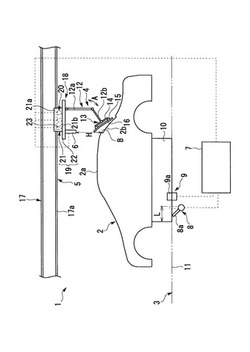
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
吸着装置

【課題】小型で騒音の小さい吸着装置を提供する。
【解決手段】モータ200と、モータ200に入力端が連結されたクランク機構300と、シリンダ400と、吸気室505に通じる吸気路504が形成されており、吸気路504の端部に、吸気室505内の負圧が作用すると開放され、正圧が作用すると閉鎖される吸気用チェック弁502を有するシリンダヘッド500と、クランク機構300の出力端に連結されてシリンダ400内を上下動するピストン603によってシリンダヘッド500の吸気室505内の圧力を変化させる構成とされており、ピストン603に形成された排気路613の端部に、吸気室505内の負圧が作用すると閉鎖され、正圧が作用すると開放される排気用チェック弁602を有するダイヤフラムポンプ600と、シリンダヘッド500に設けられたバキュームパット700と、を備えている。
(もっと読む)
小物部品のハンドリング方法及びその装置
【課題】吸引吸着を用いた装置の問題点を解消でき、小物部品の一般的なハンドリングについても好適に利用できる小物部品のハンドリング方法及びその装置を提供すること。
【解決手段】個片のワーク10を所定の位置へ順次供給するワーク供給機構11と、ガイド部12に設けられた穴13から突出入可能に配され、ワークの一面10aに当接して保持するために往復動可能に設けられた一面側プッシャー20と、一面側プッシャー往復動機構22と、ワークの一面10aとは反対側の他面10bに当接して一面側プッシャー20との間でワーク10を挟んで保持するように往復動可能に設けられた他面側プッシャー25と、他面側プッシャー往復動機構27と、他面側プッシャー25に外嵌された状態に配され、ワーク10の外側縁に複数の挟持爪32が当接することでチャックするコレット30と、複数の挟持爪32を作動させるコレット作動機構35とを具備する。
(もっと読む)
ウインドシールド取り付け装置及び使用方法
車両のウインドシールドを交換する際に技術者1人で使用するためのウインドシールド取り付け装置である。装置は、車両の側窓に貼り付け可能な第1組立体と、車両に設置されようとしているウインドシールドに貼り付け可能な第2組立体を含んでいる。第2組立体は、第1組立体に連結し、第1組立体に対して軸回転するように適合されている。 (もっと読む)
被挿入物の把持・挿入装置および被挿入物の把持・挿入方法
【課題】 被挿入物を挿入孔に軸心を揃えて挿入するに際して、種々の大きさの被挿入物に対応することができ、簡単な構造により、短時間に、作業能率よく挿入することができる被挿入物の把持・挿入装置を提供する。
【解決手段】 被挿入物を把持して挿入孔に軸心を揃えて挿入するために使用される被挿入物の把持・挿入装置60が、3本以上の把持指65を有し、これらの把持指65は、円周方向に間隔を置いて配置されて、放射方向に進退可能にされ、把持指65の内側面は、被挿入物を把持する把持面とされ、把持指65の外側面は、少なくともその先端部に先端に行くに従い内方に向かうテーパが付されて、挿入孔の入口に接触可能にされ、被挿入物把持・挿入装置60の位置を挿入孔の位置にならわせて修正するならい機構を備えている。
(もっと読む)
ワーク整列システムおよびワーク移動方法
【課題】整列するワークの種類を容易に変更できるワーク整列システムを提供すること。
【解決手段】ワーク整列システム1は、ナット11が収容された収容装置10と、ナット11が載置される取り出し台30と、この取り出し台30からナット11を把持して取り出して整列するロボット20と、を備える。ロボット20のロボットアーム23の先端には、電磁石53が設けられる。収容装置10は、異なる種類のナット11が収容された複数のバケット131〜134と、複数のバケット131〜134の中から選択された1つを取り出し台30の近傍に移動する送りねじ機構14と、を備える。取り出し台30は、ナット11が載置される載置部31と、載置部31上のナット11を複数のバケット131〜134の中から選択された1つに排出する駆動装置32と、を備える。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークを傾斜させながら搬送する場合に、パワーアシスト装置による位置決め精度を確保しつつ、搬送効率の改善を図るべく、ワークを傾斜させながら搬送しても、作業者の操作力が小さく、また作業者が所望する操作方向と実際にワークの変位方向が一致する、操作性の良いパワーアシスト装置およびその制御方法を提供する。
【解決手段】ワーク保持装置3と、ハンドル3cと、ハンドル3cに作用する作業者の操作力を計測する力センサ3dと、ワーク保持装置3を支持するロボットアーム2と、力センサ3dの計測結果に基づいてロボットアーム2の動作を制御する制御装置5と、を備えるパワーアシスト装置1の制御方法であって、ワーク保持装置3には、ワーク保持装置3の傾斜角度を計測する角度センサ6が備えられ、角度センサ6の計測結果と、力センサ3dの計測結果に基づいて、制御装置5によって、ロボットアーム2の動作を制御する。
(もっと読む)
フローティングチャック装置及びフローティングチャックユニット
【課題】 簡易な構成でもってチャックのフローティングを可能としコンパクト化を図ることができるフローティングチャック装置及びフローティングチャックユニットを提供する。
【解決手段】 上下方向に延びる軸部21を有し、その先端の吸着部にワークを吸着させて該ワークWを保持するチャック20が、該チャック20を移動させる移動基板3に対してフローティング可能に支持されるフローティングチャック装置10又はこれが複数並設されたフローティングチャックユニット1において、チャック20にフランジ部22を設け、軸部21を挿通させるチャック挿通孔11cを有しフランジ部22を支持する第一ガイドブロック11と、該第一ガイドブロック11と対をなしフランジ部22を上方から挟み込む第二ガイドブロック12とを設け、第一ガイドブロック11とフランジ22との間、及びチャック挿通孔11cと軸部21との間にクリアランスn1、n2を形成する
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
軸状部品の保持装置
【課題】 供給ロッドに保持した軸状部品を目的箇所に到達させるのと同時に、相手方部材との間で強固に挟み付けることができる軸状部品の保持装置を提供する。
【解決手段】 係止部材7が軸状部品1を係止して進出し、保持部材20との間に軸状部品1を挟み付けるものであり、保持部材20の表面24に軸状部品1の一部を受け止める受け部材25が設けられ、係止部材7に進出方向に開放した係止凹部18が設けられているとともに、係止凹部18の幅W1は受け部材25の幅W2よりも大きく設定され、この設定により係止部材7が進出したとき係止凹部18内に受け部材25が相対的に進入して軸状部品1を挟み付けるように構成した。
(もっと読む)
自動組立装置
【課題】比較的簡易な構成によって効率的に部品を組み付けることができる、撮像手段を備えた自動組立装置を提供すること。
【解決手段】自動組立装置は、少なくとも2軸制御される移動ヘッド(1)と、移動ヘッド(1)に取り付けられた部品把持手段(3)と、移動ヘッド(1)に取り付けられた撮像手段(4)とを具備し、撮像手段(4)は、部品供給ステーション(S1)に配置された組立部品(W1)、及び部品把持手段(3)によって把持された組立部品(W1)、及び組立ステーション(S2)に配置された被組立部品(W2)を撮像視野内に収めるように、少なくとも2軸制御の制御軸に対して非平行な光軸(4a)を有する。
(もっと読む)
ガラス搬送装置及びその制御方法、並びに車両の製造方法
【課題】ガラスを精度よく取付位置まで搬送することができるガラス搬送装置、ガラス搬送装置の制御方法、及び自動車の製造方法を提供すること。
【解決手段】本発明の一態様にかかるガラス搬送装置は、自動車100のガラスをその取付位置まで搬送するガラス搬送装置である。ガラスを保持する吸着治具60と、吸着治具60を移動させるための関節52を有するアーム機構50と、吸着治具60で保持したリアガラス2bを、ボディ101形状に応じた仮想ガイドGrに沿って移動させるよう、アーム機構50を制御する制御部80とを備えている。フロントガラス2aの取付位置の高さを記憶し、取付位置の高さに応じて仮想ガイド高さを算出し、仮想ガイド高さの仮想ガイドGrに沿って、リアガラス2aを移動させている
(もっと読む)
自動組み立て装置
【課題】複数の部品からなる物品を製造する場合に、組み付け工数を低減してコストの低減を図るとともに、誤組み付けが起こり難くする。
【解決手段】自動組み立て装置4は、予め成形された本体部品2を供給する本体部品用パーツフィーダ15と、予め成形された弁体部品3を供給する弁体部品用パーツフィーダ16と、本体部品用パーツフィーダ15から供給された本体部品2を位置決めする位置決め装置25と、弁体部品用パーツフィーダ16から供給された弁体部品3を本体部品2に組み付ける組み付け装置23とを備えている。
(もっと読む)
チャック及び時計の製造方法
【課題】 微小なワークを保持することができるとともに、様々な表面形状のワークを確実に保持することができ、一台で表面形状の異なる複数のワークに対応することができるチャックを提供すること、及び、チャックの台数を削減してコストダウンを図るとともに、調整時間を短縮して生産性の向上を図ることができる時計の製造方法を提供することを目的とする。
【解決手段】 ストロー部材4の先端面4aをワークXに当接させるとともにストロー部材4の基端側からエア吸引することで、ストロー部材4の先端面4aにワークXを吸着させ、ワークXを保持するチャック1において、ストロー部材4は、その軸線L方向に沿って平行に配設された軸線L方向に移動可能な複数のパイプ40からなる。
(もっと読む)
チャック及び時計の製造方法
【課題】 様々な表面形状のワークを確実に保持することができ、一台で表面形状の異なる複数のワークに対応することができるチャックを提供すること、及び、チャックの台数を削減してコストダウンを図るとともに、調整時間を短縮して生産性の向上を図ることができる時計の製造方法を提供することを目的としている。
【解決手段】 通気性を有する吸着部4の先端面4aをワークXに当接させるとともに吸着部4の基端側からエア吸引することで、吸着部4の先端面4aにワークXを吸着させ、ワークXを保持するチャック1において、少なくとも吸着部4の先端面4aが、弾性変形可能である。
(もっと読む)
中空部品の供給ヘッド
【課題】 供給ヘッドに中空部品を安定性よく保持することができる中空部品の供給ヘッドを提供する。
【解決手段】 供給ロッド14の先端部に取付けたヘッド部材32に中空部品1を保持して目的箇所へ供給するものである。中空部11の一端に開口部12が設けられ他端に閉鎖部8が設けられた中空部品1を供給の対象とし、ヘッド部材32の中央部に中空部品1の中空部11内に合致するガイド部材48が設けられている。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置に対する作業負荷を軽減しつつ、ワーク組み付け作業の作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】パワーアシスト装置1の制御方法であって、ウィンドウ10の基準位置10a乃至10dが取付対象物たる本体11の嵌め込み基準位置11a乃至11dに合致したことを検知する位置決め完了検知工程と、位置決め完了検知工程が完了したときのウィンドウ10の基準位置10a乃至10dと本体11の嵌め込み基準位置11a乃至11dの合致位置を検知する基準位置検知工程と、合致位置に基づいて仮想回転軸を生成し、ウィンドウ10が仮想回転軸を中心としてパワーアシスト装置1により自律的に回転される自律回転工程から成る。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークの位置決めをする際には、作業者による判断や経験(勘やコツ)を活かしながら、位置決めの一部についてパワーアシスト装置に負担させることにより、ワークの位置決め作業に対する作業者の負担を軽減しつつ、位置決め精度の向上と作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】制御装置2aを備え、作業者の作業動作をアシストするべく前記作業者の作業動作に協調して自律的に作動するパワーアシスト装置1の制御方法において、制御装置2aには、一連の作業タスクを複数の作業区間に分割し、作業区間ごとに制御ロジックが設定されるパワーアシスト装置1の制御方法であって、パワーアシスト装置1が自由度を有する作動方向ごとに、制御ロジックが設定される。
(もっと読む)
ワーク搬送装置およびワーク設置方法
【課題】ワークの周縁部を均一な力で被設置物に押圧することが可能なワーク搬送装置およびワーク設置方法を提供する。
【解決手段】把持具20によりリアガラス5を把持し、把持したリアガラス5を支持アーム10の動作により車体7の窓枠7aまで搬送するとともに、窓枠7aに対して押圧しつつ設置するワーク搬送装置1であって、前記把持具20の各吸着パッド30は、該吸着パッド30にかかる力を検出可能な力検出センサ31を備え、ワーク搬送装置1の制御装置80は、前記窓枠7aにリアガラス5を設置する際に、前記各吸着パッド30の力検出センサ検出値31の大きさに基づいて、前記支持アーム10の動作を制御する。
(もっと読む)
ワーク搬送装置
【課題】昇降用の駆動手段および回動動作用の駆動手段といったように、大きく重量大な駆動手段を2種類も備えなくて済み、小型で軽量に構成することができるワーク搬送装置を提供する。
【解決手段】ワークとなるウィンドウ5を把持する把持具20と、把持具20を移動可能に支持する支持アーム10とを備え、把持具20にて把持したウィンドウ5を支持アーム10によりウィンドウ5が組み付けられるウィンドウ枠7a・枠7bまで搬送するとともに、ウィンドウ5の姿勢をウィンドウ枠7a・7bに応じた姿勢に変更するワーク搬送装置1であって、支持アーム10を、複数のリンク11・12・13・14が閉ループ状に接続される閉ループリンク機構に構成し、支持アーム10の把持具20に接続される一対のリンク13・14のうち、何れか一方のリンク13・14に対する把持具20の姿勢を固定可能に構成する。
(もっと読む)
41 - 60 / 109
[ Back to top ]