
Fターム[3C269EF52]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムの作成に関する特徴 (739) | プログラムの再利用 (38)
Fターム[3C269EF52]の下位に属するFターム
ライブラリ化、モジュール化 (21)
Fターム[3C269EF52]に分類される特許
1 - 17 / 17
多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法
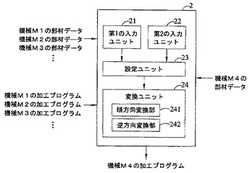
【課題】多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法を提供する。
【解決手段】第1の機械と第2の機械との間でプログラムの変換を行うための多軸同期動作機械のプログラム変換モジュールであって、複数組の第1の機械の加工プログラム及びメカニズムデータが入力される第1の入力ユニットと、複数組の第2の機械のメカニズムデータが入力される第2の入力ユニットと、第1の機械のうちの少なくとも1つをソースマシンに設定するとともに、第2の機械のうちの1つをターゲットマシンに設定する設定ユニットと、ソース及びターゲットマシンのメカニズムデータに基づいて、運動学的方法を利用してソースマシンの加工プログラムをターゲットマシンに適用される加工プログラムに変換する変換ユニットと、を備える。これにより、複数台の異機種である多軸同期動作機械の間において加工プログラムの相互変換を行うことができる。
(もっと読む)
オフラインティーチング方法

【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
NCプログラムの解析編集装置、方法、プログラム、および記憶媒体
【課題】編集作業を容易にする。
【解決手段】本装置を、NCプログラム21を編集画面71に編集可能に表示するNCプログラム編集手段41と、概要情報を抽出し概要情報画面72に表示する概要情報編集手段43と、切削加工情報を抽出する切削加工情報抽出手段45と、CADデータ23から形状情報を抽出する形状情報抽出手段47と、切削加工情報、または形状情報の少なくとも一つの情報に基づき、工具軌跡データ層51、穴明図データ層52、またはワーク図データ層53を生成するとともに、描画画面73に重ね合わせ可能に描画表示する図形描画手段49と、切削加工情報をリスト画面74に表示する切削加工情報表示手段55と、表示領域をそれぞれ連動表示させる連動表示手段57と、ミル加工または穴明加工について解析し、対応する画面に表示させる切削加工解析手段59と、を備えるように構成する。
(もっと読む)
4軸加工機用数値制御装置
【課題】5軸加工機用のプログラム指令によって5軸加工機で行っていた加工を、4軸加工機で加工する。
【解決手段】4軸加工機用数値制御装置100は、指令解析部10でプログラム指令を解析して補間用データを作成し、補間部11で補間用データによって補間を行い各軸のサーボ12X,・・・12Cを駆動する。仮想角度判断手段15は、許容値16と仮想角度設定手段14によって設定されている仮想角度13とを参照しながら、B軸(仮想軸)指令が仮想角度13と一致するかどうか判断し、一致すると判断した場合に仮想軸のプログラム指令は仮想角度13であるとみなす。仮想軸のプログラム指令は仮想角度13であるとみなすとは、仮想軸に対して仮想角度13のプログラム指令があったことを想定した補間用データを作成し補間を行うことである。ただし、毎ブロック同じ位置(仮想角度)が指令されるとみなすことになるので、実際の補間は行われない。
(もっと読む)
4軸加工機用数値制御装置
【課題】従来の5軸加工機用のプログラム指令によって5軸加工機で行っていた加工を4軸加工機で加工する。
【解決手段】4軸加工機用数値制御装置100は、指令解析部10で補間用データを作成し、各軸のサーボ12X,・・・12Cを駆動する。仮想角度判断手段15は、許容値16と仮想角度設定手段14によって設定されている仮想角度13とを参照し、演算回転軸位置と演算仮想軸位置の2組の解について、一致解があるかどうか判断する。回転軸指令みなし手段17は、一致解があると判断した場合、前記一致解の前記演算回転軸位置と前記仮想角度を回転軸と仮想軸に対するプログラム指令とみなす。回転軸指令みなし手段17において仮想軸のプログラム指令を仮想角度とみなすとは、仮想軸に対して仮想角度のプログラム指令があったことを想定した補間用データを作成し補間を行うことである。ただし、実際の補間は行われない。
(もっと読む)
多関節ロボットのティーチングデータ検証方法
【課題】新たに作成した多関節ロボットのティーチングデータについて効率的に検証を行う。
【解決手段】多関節ロボットのティーチングデータ検証方法では、第1車両100において複数の作業点Pnに対する多関節ロボット12の新たな第1ティーチングデータ104を、第2車両102において複数の作業点Qnに対する既存の第2ティーチングデータ106に基づいて検証をする。第1ティーチングデータ104における所定の作業点Pnを比較対象データとして、対応する第2ティーチングデータ106における作業点Qnのデータを比較基準データとし、それぞれの作業点Pn、Qnの位置データの位置差分ΔAと、該作業点に対して作業をする電極22a、22bの角度データの角度差分ΔBとを求める。位置差分ΔA及び角度差分ΔBに基づいて、比較対象データについて異なる種別の検証を行い又は検証を省略する。
(もっと読む)
ロボットオフラインプログラミング装置
【課題】最適な情報を含むロボットのプログラムを短時間で作成する。
【解決手段】各ロボット(11、12)のプログラムを作成するロボットオフラインプログラミング装置(20)は、第一車体(A)においてスポット溶接が行われる打点の打点位置情報(33)、打点順序情報(34)および打点配分情報(35)を記憶する第一記憶手段(32)と、を含み、打点配分情報においては、スポット溶接の打点のそれぞれに対してロボットの一つが配分されており、さらに、第二車体(B)においてスポット溶接が行われる打点のスポット溶接の打点位置情報を記憶する第二記憶手段(42)と、第一車体の打点位置情報および打点順序情報と第二車体の打点位置情報とに基づいて第二車体の打点順序情報および打点配分情報を決定する決定手段(22)と、第二車体の打点位置情報、打点順序情報および打点配分情報に基づいて第二車体をスポット溶接するための各ロボットのプログラムを作成する作成手段(23)とを含む。
(もっと読む)
金型加工データ変更方法
【課題】元の加工データを有効に利用して短時間に二番型用の加工データを得る。
【解決手段】成形品モデルに基づき、NC加工データを作製する。NC工作機械により、NC加工データに基づいて金型を作製する。金型の修正をして一番型を得る。計測器により、一番型を3次元的に計測して、メッシュデータ34を得る。NC加工データにおける加工工具16の移動経路20を示す複数箇所のデータから選択された箇所36で、加工端面16aがメッシュデータ34に対して点接触する位置まで加工工具16をZ方向に移動させる。元のNC加工データを、移動後の加工工具16の位置に基づいて変更する。
(もっと読む)
制御プログラム作成プログラム、及び制御プログラムの作成方法、繊維機械システム
【課題】一括制御プログラムを作成するのに要する労力を低減できるよう、基準となる個別制御プログラムを用意するだけで自動的に他の個別制御プログラムも作成されるプログラムを提供する。
【解決手段】ユニットコントローラ19が複数の紡績ユニット2を制御するのに供される一括制御プログラムを作成するための、制御プログラム作成プログラムにおいて、一括制御プログラムは、各紡績ユニット2に対応する固有の個別制御プログラム1−a〜1−d、2−a〜2−dを含むものであり、コンピュータに、基準となる個別制御プログラムとしての基準個別制御プログラム1−a、2−aを取得する第1の機能と、前記第1の機能によって取得した前記基準個別制御プログラム1−a、2−aに基づいて、他の個別制御プログラム1−b〜1−d、2−b〜2−dを作成する第2の機能と、を実現させる。
(もっと読む)
プログラム作成方法
【課題】移動命令に付随した複数の制御命令をもつロボットの教示プログラムを編集して、往復動作を実現するための教示プログラムを作成する。
【解決手段】ロボットの教示プログラムを展開するためのRAM領域上には、時系列に連続して並べられた複数の制御命令からなるプログラムが展開されている。このプログラムを基本プログラムとし、このプログラム中に時系列ごとに並べられた複数の制御命令を選択して、制御命令群を作る。これらの制御命令群には少なくとも1つの第1種制御命令と1つの第2種制御命令が含まれている。また、少なくとも3個以上で構成されている必要がある。この制御命令群の単位ごとに順次処理を行うことで、基本プログラムを往路動作とした、復路動作の教示プログラムを作成する。
(もっと読む)
穴加工のためのNCデータを生成する方法およびシステム
【課題】穴形状に対応するNCデータを自動的に作成する方法及びシステムを提供する。
【解決手段】製品の穴形状データがCAD上で作成され(S100)、CAMが製品の穴形状データを受け付けて製品の穴形状データを反転させた金型の穴形状データを認識する(S110)。穴の形状特性を指示する情報が抽出され(S120)、被加工物における加工開始位置と加工終了位置を算出し加工位置を決定し(S130)、加工IDを決定し(S140)、加工IDに基づいて加工パターンを決定する(S150)。工具の有効長のチェックが行われ(S160)、工具の動作を制御するパラメータの値を決定し(S170)、ホルダの干渉チェックを行い(S180)、NCデータを生成する(S190)。工具の寿命によりNCデータを分割し(S200)、工具を使用する優先順位を決定し(S210)、加工者に加工情報を伝達し(S220)、加工を開始する(S230)。
(もっと読む)
軌跡データ生成装置、軌跡データ生成方法及び軌跡データ生成プログラム
【課題】本発明は、音楽に合わせて動き対象を動かすための軌跡を得る。
【解決手段】本発明は、音楽ロボット装置11の楕円体状筐体20が動くときに再生する圧縮音楽データを設定し、ユーザによって描かれた楕円体状筐体20の動きの軌跡に対し、その設定した圧縮音楽データの再生時間情報を関連付けて軌跡データを生成することにより、楕円体状筐体20を動かすための所望の軌跡を示し、かつ圧縮音楽データの再生に同期して楕円体状筐体20を動かすための軌跡データを容易に生成でき、音楽に合わせて楕円体状筐体20を動かすための軌跡を容易に得ることができる。
(もっと読む)
ロボットプログラムを作成するための装置、プログラム、記録媒体及び方法
【課題】ロボットによる新規ワークに対する最適な搬送作業プログラムを、オペレータの熟練を要することなく、少ない工数で容易かつ確実に作成できるようにする。
【解決手段】ロボットプログラミング装置10は、ワーク特徴情報12を取得するワーク特徴取得部14と、ワークとワーク保持具との相対位置情報16を取得する保持具位置取得部18と、ワークとハンドとの相対位置情報20を取得するハンド位置取得部22と、ワーク特徴情報12、相対位置情報16及び相対位置情報20を、一組の既得データDとして互いに関連付けて、複数種類のワークについて記憶する記憶部24と、記憶した複数組の既得データから、新規ワーク特徴情報26との合致度が最も高いワーク特徴情報を含む最適既得データSDを検索する既得データ検索部28と、最適既得データを用いて新規ワークに対する搬送作業プログラム30を生成するプログラム生成部32とを備える。
(もっと読む)
水車ランナの製造装置及び水車ランナの製造方法
【課題】水車ランナの設計や加工成形に費やされる期間の短縮化を図る。
【解決手段】水車ランナ製造装置1のCAD/CAM装置8上で実行される切削用データ作成プログラムは、第1の水車ランナの加工成形に適用されるカッタ7による切削範囲を定めた第1の切削用データを記憶する外部記憶装置19と、第2の水車ランナの形状に対応した羽根設計点列データを入力する点列データ入力部15と、羽根設計点列データに基づいて第2の水車ランナの外形データを生成する外形データ生成部16と、外形データと第1の切削用データとを重ね合わせて重なり状況を検出するデータ重なり状況検出部17と、この検出結果に基づいて、第2の水車ランナの加工成形に適用されるカッタ7による切削範囲を定めた第2の切削用データを生成する切削用データ生成部18とを備える。
(もっと読む)
ロボットの動作設定方法
【課題】
作業や移動順序等の実行条件を位置に関して設定することで指定された位置で予め決められた作業を実行するロボットの動作設定方法を提供する。
【解決手段】
ロボットで実行可能にするために、実行条件を位置に関して設定する。そして、位置設定プログラム、作業及び動作プログラム及び位置設定プログラムで設定された位置のデータ及当該位置に関して設定された作業及び動作、設定された位置間の移動順序を設定する手段で設定された移動順序に基づいて、位置のデータと当該位置に設定されたプログラムとを一致させて、設定された位置間の移動途中においてプログラムに基づく所定の動作を実行させる制御命令が設定されて、定された制御命令が前記位置に関連して記憶される。
(もっと読む)
ロボット
【課題】
作業や移動順序等の実行条件を位置に関して設定可能なロボットを提供する。
【解決手段】
作業を実行する複数の位置を設定する手段で複数の位置を設定し、該設定された位置における作業を設定する。そして設定された位置間の移動順序を設定する。
その作業を設定する手段は、予め用意された作業プログラムから作業を設定し、設定された複数の位置に基づく移動位置と順序は、作業内容によって又は移動先を表すデータが与えられることのいづれかで決定される。
当該移動位置データと当該移動位置に設定された作業プログラムとを一致させて、位置間の移動途中において作業プログラムに基づく所定の動作を実行させる制御命令を設定して記憶させる。制御装置は設定された位置において、設定された作業を実行させることで、各設定に基づいてロボットの作業を機能させる。
(もっと読む)
ロボットにおけるコンピュータ読み取り可能な記録媒体及びコンピュータ読み取り可能な記録媒体を備えたロボット
【課題】
作業や移動順序等の実行条件を位置に関して設定されるロボットにおけるコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】
ロボットで実行可能にするために、位置設定プログラム、作業及び動作プログラム及び位置設定プログラムで設定された位置のデータ及当該位置に関して設定された作業及び動作、設定された位置間の移動順序を設定する手段で設定された移動順序に基づいて、設定された位置間の移動途中においてプログラムに基づく所定の動作を実行させる制御命令が設定されて、定された制御命令が前記位置に関連して記憶され、ロボットにおけるコンピュータ読み取りが実行される。
(もっと読む)
1 - 17 / 17
[ Back to top ]