
Fターム[3C269EF69]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムの作成に関する特徴 (739) | 形状モデルの利用生成 (296)
Fターム[3C269EF69]の下位に属するFターム
素材形状を利用するもの (59)
製品形状を利用するもの (136)
中間形状を生成するもの (27)
Fターム[3C269EF69]に分類される特許
61 - 74 / 74
切削条件適正化装置、切削条件適正化方法、プログラム

【課題】幅広い切削加工に適用でき、正確、かつ高速に切削条件の適正化を行うことができる切削条件適正化装置を提供する。
【解決手段】切削条件適正化装置1の制御部3は、切削抵抗力のシミュレーションを行い、切削抵抗力データベース29を作成する。次に、制御部3は、工具経路情報から加工パターンを算出し、切削抵抗力データベース29を参照して切削抵抗力を予測する。そして、制御部3は、予測した切削抵抗力が所定の範囲内に入るように切削条件を調整する。
(もっと読む)
数値制御装置

【課題】干渉チェックの周期が長くても、確実に干渉発生を予測できる干渉チェック機能を有する数値制御装置を得る。
【解決手段】NCプログラムを実行し可動部を駆動する各軸への移動指令量を出力する所定周期毎の補間、分配処理を行う。この補間、分配処理よりも所定時間だけ早く、補間、分配処理して先行位置予測と干渉チェック周期間の各軸の最大/最小位置(座標値)を求める処理を行う。前回の干渉チェック時の可動部1の位置Aと今回の干渉チェック時の可動部1の位置Bへ移動する間の各軸の最大/最小値及び可動部1の立体形状より、干渉チェック用の立体領域4を求め、この立体領域4と干渉対象物2が干渉しているか否かを判別する。干渉チェック間の移動における各軸の最大位置、最小位置によって、干渉チェック用の立体領域4が求められ干渉チェックがされるから、確実に干渉発生を予測できる。
(もっと読む)
製造システムおよび製造物
【課題】対象物に印加されるフィールド[f] に応じて生成されるポテンシャル[x] を有する対象物の製造システムを提供する。
【解決手段】演算処理可能な対象物の数学モデル(801)は対象物外形状より分割した複数の有限要素(802)に関連するフィールド[f] 及びポテンシャル[x] の各数値を特定して生成する。各有限要素(802)の素材の各物性値(804)の対称性が特定され、関係式[f]=[k][x]及び対称性に基づいて素材の物性マトリックス[k] を算出する。素材の物性値(804)の係数を、素材の物性マトリックス[k] から有限要素毎に抽出し、抽出された素材物性値(804)の係数と既知の素材物性値の係数とを一致するように比較する。製造設備を制御するための各製造パラメータ(805)を一致した素材物性値(804)の各係数に基づいて決定し、上記決定された各製造パラメータ(805)に応じて製造設備を制御して上記対象物を製造する。
(もっと読む)
工作機械の制御装置
【課題】作業者が移動体を簡単に且つ安心して手動操作することができる工作機械の制御装置を提供する。
【解決手段】工作機械の制御装置1は、手動操作時に外部から入力される動作信号を基に移動体の移動位置及び移動速度を制御する位置制御部12と、移動体及び構造体のモデルデータを記憶するモデルデータ記憶部13と、構造体のモデルにその外形形状を外側にオフセットして得られる1以上の速度制御領域を設定するとともに、設定した速度制御領域及び位置制御部12から受信した現在位置などを基に、移動体を現在位置に移動させた状態のモデルデータを生成して、移動体が速度制御領域内で移動するか否かを確認し、移動を確認すると、移動する速度制御領域について予め設定された制限速度を位置制御部12に送信する移動領域確認部17とを備える。位置制御部12は、動作信号に応じた移動速度が制限速度を超える場合には、移動体を制限速度で移動させる。
(もっと読む)
経路作成装置及び経路作成方法
【課題】ロボットの障害物を回避する動作経路を高効率に作成する経路作成装置及び経路作成方法を提供することを課題とする。
【解決手段】ロボットの障害物を回避する動作経路を作成する経路作成装置1であって、ロボットと障害物との干渉確認を行うための平面の数を設定する平面数設定手段4と、障害物を認識する障害物認識手段2と、平面数設定手段4で設定した数分の各平面において、ロボットと障害物との干渉を確認する干渉確認手段6と、干渉確認手段6における確認結果に基づいて動作経路を作成する経路作成手段7とを備えることを特徴とする。
(もっと読む)
板金板取方法
【課題】小物部品に予め外枠を加えたNCデータを作成する必要がなく、TPP板抜き加工後の部品毎搬出を可能とする板金板取方法を得る。
【解決手段】TPP加工部品を加工後に単独で搬出可能な切離し用部品P1と、単独では搬出不可能なミクロジョイント付部品A、B、C、Dとに分け、切離し用部品P1については、板素材と最終的に切離される一点の最終切離し切断部6を有するようにNCデータを作成し、ミクロジョイント付部品A、B、C、Dについては、周囲の板素材との間で複数点のミクロジョイント部9により接続されるようにNCデータを作成して、まず、切離し用部品P1を板素材に配置し、その後に板素材の切離し用部品P1を配置していない部品未配置領域にミクロジョイント付部品を配置するようにした。
(もっと読む)
シミュレーション方法およびその装置
【課題】 加工経路を決定するパラメータや三次元形状モデルデータを個々に設定することなく、実機から取込むことにより、工具経路を忠実に再現できるシミュレーション環境を構築することが可能なシミュレーション装置を得る。
【解決手段】 機械に保有するパラメータ、三次元形状モデルデータ等の、経路チェックやシミュレーションに必要なデータを出力する事ができる数値制御装置と、その数値制御装置から出力したデータを使用して、実機と同条件のシミュレーション環境を再現し、且つ、実機に搭載するシーケンス制御用H/Wと同一のH/Wを搭載することにより、周辺機器を含めて、実機と全く同じ工具経路を生成し、シミュレーションをすることが出来るように構成されていることを特徴とするシミュレーション装置。
(もっと読む)
作業ロボットのオフラインティーチング装置
【課題】 オフラインティーチングで、作業ロボットとワークおよび周辺装置の干渉チェックを行うに際して、干渉チェックの精度、信頼性を高く維持しつつも、干渉チェックの処理時間を減らす。また、作業ロボットの3次元モデルを画面上で実際の作業ロボットと同じ速度で再生動作させるに際して、画面更新間隔の時間内に干渉チェックを確実に終了させるようにして、コマ落ちすることなく画面上で作業ロボットを滑らかに再生動作させる。
【解決手段】 作業ロボット1の3次元モデル1M(ポリゴン90)とは別に干渉チェック用線分20が設定され、線分20と、ワーク10および周辺装置80の3次元モデル10M、80Mを構成するポリゴン91とが交差していることを判定することで、両者の干渉を判定する。また、干渉チェックサブルーチン処理に使用する干渉チェック用線分20の本数Cを調整することで、干渉チェックサブルーチン処理に要する時間を調整して、画面更新間隔の時間tを標準更新時間tstd付近に調整する。
(もっと読む)
回転体加工中心算出方法、回転体加工中心算出プログラム、および回転体加工中心算出装置
【課題】回転加工を行うワークの回転中心を的確に求めることのできる回転体加工中心算出方法を提供する。
【解決手段】加工前ワークの3次元形状を測定する段階と、ワークの回転加工後の出来上がり形状をシミュレーションにより作成する段階と、前記シミュレーションによる出来上がり形状に対して前記測定により得られた前記加工前ワークの3次元形状から余分な部分を取り除く段階と、前記余分な部分を取り除いた形状の回転中心を算出する段階と、を有することを特徴とする回転体加工中心算出方法。
(もっと読む)
ロボット言語処理装置
【課題】ロボット言語の表示・編集を行う際に教示装置やプログラミングペンダントに表示されるのは、従来、ロボット言語の中間コードをキャラクタ表現に変換したものだけであり、ロボットの動作を直感的に把握することができず、言語の習得に時間を要し、教示後にロボットを実際に動かして作成したプログラムの正当性を確認する必要があった。
【解決手段】グラフィカル表示が可能でありポインティングデバイスによってその表示画面中の位置を指定できる表示装置と、ロボットプログラムを格納するメモリと、ロボットプログラムを参照して、作業区間及びエアーカット区間を連続した線として表示装置に表示し、ポインティングデバイスにより表示画面に表示中のいずれかの線が指定されたときには、その線における作業内容の種類を表示画面に表示するグラフィカル言語処理部とを設け、グラフィカル・ユーザ・インタフェースに基づく教示を可能にする。
(もっと読む)
部品集合体の切断方法
【課題】本発明の目的は部品類一式の部品集合体の切断方法に関する。
【解決手段】本発明によると、本切断方法には次の工程が含まれる。すなわち、a)各部品の等高線を定める点とデカルト座標(X,Y)系における部品集合体の各部品の位置に関連するデータの生成工程、b)各構成部品が単一部品としてみなされる1つの枠により具体化される少なくとも1つの構成部品内の部品の第1再編成工程、c)各組立品が単一部品としてみなされる1つの枠で具体化される少なくとも1つの組立品内の構成部品の第2再編成工程、d)それぞれ(b)および(c)工程で定められた構成部品と組立品をもとにした部品切断順序の設定工程、e)切断工具が(d)工程から設定された前記切断順序に応じて部品から部品へと移動する切断工程である。
(もっと読む)
非線形工程計画の生成方法及びそれを利用したインターネット基盤のSTEP−NCシステム
【解決手段】本発明は、非線形工程計画の生成方法及びそれを利用したインターネット基盤のSTEP−NCシステムに係り、より詳細には、現場状況を反映した多様な代案工程と加工順序情報とを含む非線形工程計画を樹立することで最適の加工を遂行しながら、異常状態に自律的に対処できる非線形工程計画を生成させる方法と、樹立された工程計画からXML形式のSTEP−NCパートプログラムを作成することでインターネットを経由して他のシステムと容易に工程情報を交換できるインターネット基盤のSTEP−NCシステムに関する。 (もっと読む)
複数の相互作用ロボットをオフラインでプログラミングする方法及びシステム
複数の相互作用ロボットをオフラインでプログラミングする方法及び装置を開示する。例えば、複数の相互作用ロボットをオフラインでプログラミングするシステム(100)は、複数の相互作用ロボット(131〜133)のプログラムコード(111)をオフラインでプログラミングし、そして検証するコンピュータ(110)と、コンピュータ(110)に接続されてプログラムコード群の内の少なくとも一つのコードのダウンロードを受信して実行するロボットコントローラ(120)と、を含む。複数の相互作用ロボット(131〜133)はロボットコントローラ(120)によって制御することができる。 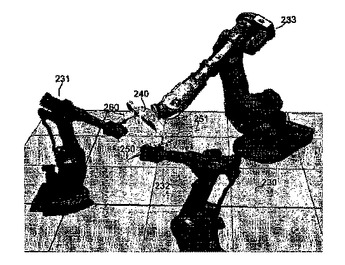 (もっと読む)
(もっと読む)
加工情報作成装置、プログラム及び加工情報作成方法
形状データベース(19)とCADからCADデータを取得しそのデータを基に形状データベース(19)を検索し対象とする加工形状のデータと工具とのシミュレーションから得られる削り残し量の結果に基づき加工形状に沿った削り残し量の数式モデルを作成する形状解析部(15)と、加工形状に沿った削り残し量の数式モデルを基にその数式モデルの特徴とその数式モデルによる削り残し量の推定結果の比較により最適な工具を選択する手段(17)と、加工形状に沿った削り残し量の数式モデルを基に、その数式モデルの次数や定数を、加工における形状の特性としてデータベースを構築する手段(18)を備えている。 (もっと読む)
61 - 74 / 74
[ Back to top ]