
Fターム[3C269EF90]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムされた作業のための準備動作 (406) | 各種構成要素の校正動作 (66) | 検出器の校正動作 (15)
Fターム[3C269EF90]に分類される特許
1 - 15 / 15
溶接ロボット制御装置
【課題】
レーザセンサを用いて相対位置方式により教示点の位置補正を行う場合、レーザセンサの着脱等により溶接トーチとの取付位置関係が狂うと、教示修正に多大な時間を要する。
【解決手段】
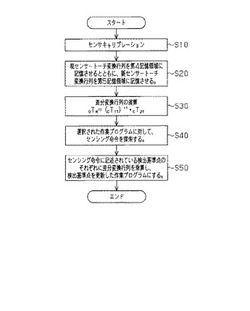
S10でレーザセンサと溶接トーチ間のキャリブレーションを行い、新センサ−トーチ変換行列CT2Tを得て、S20で記憶部に格納する。S30で差分変換行列OTNの演算を行う。S40で予め選択しておいた作業プログラムに対して、センシング命令に記憶された検出基準点を探索する。S50で、見つけ出した検出基準点に対してそれぞれ差分変換行列OTNを乗算して、検出基準点を更新する。
(もっと読む)
学習制御機能を備えたロボット

【課題】大部分の現場において、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部と、ロボット機構部の動作を制御する制御装置とを含むロボットであって、制御装置は、ロボット機構部の動作を制御する通常制御部と、作業プログラムによりロボット機構部を動作させて、センサによって検出した前記ロボット機構部の制御対象位置を通常制御部に与えられた目標軌跡もしくは位置に近づけるために学習補正量を算出する学習を行う学習制御部と、を有し、学習制御部は、学習稼動状態で設定可能な最大速度オーバライドを算出し、最大速度オーバライドに至るまで複数回に渡って速度オーバライドを増加させながら学習補正量を算出する学習を行うことを特徴とする。
(もっと読む)
加工状況監視装置
【課題】複数のカメラの中から選択されたカメラにより生成される画像を通してオペレータがワークの加工状況を監視することができる加工状況監視装置を提供する。
【解決手段】加工状況監視装置1は、加工プログラムを基に3次元モデルデータを更新する加工シミュレーション実行部16と、複数のカメラ11,12,13,14のカメラパラメータと3次元モデルデータとを基に、ワークにより工具の先端が隠れない2次元画像データを生成可能なカメラ11,12,13,14を加工プログラムのブロック毎に選択するカメラ選択部24と、加工プログラムのブロックと、選択されたカメラとを関連付けて記憶する選択カメラ記憶部25と、選択カメラ記憶部25に格納されたデータを基に、制御装置60から得られる実行ブロックに対応したカメラ11,12,13,14により生成される2次元画像データを画面表示装置66に表示させるカメラ切換部27とを備える。
(もっと読む)
切削機械及びその加工位置補正方法
【課題】チャックに対する芯押軸等の変位量を精度良く検出し得る切削機械及びその加工位置補正方法を提供する。
【解決手段】X方向およびZ方向について、NCテーブル原点からテスト材66の軸心へ向かって移動する移動量(Geometric−Offset値)及び傾き角度θ(即ち、長尺ワークに対するチップ26Aの仮想移動軌跡の仮想データ)を設定する。即ち、バイト26の仮想移動軌跡に関する仮想データに基づき、CPUはチャック12と芯押軸89の軸心の傾きθ及び図示しないNCスライダの傾きを補正するように長尺ワークを加工する。具体的には、長尺ワークに対し、仮想移動軌跡の仮想データに基づいてバイト26を補正しながら加工する。従って、バイト26における仮想移動軌跡の仮想データを精度良く検出し得るので、長尺ワークを切削する場合でも加工精度が向上する。
(もっと読む)
自動作業システムにおけるロボットの診断方法及び診断プログラム
【課題】 位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレ量を検出してこのズレ量に基づいて位置決めロボット又は作業ロボットに異常が生じたか否かを診断する。
【解決手段】位置決めロボット100が保持ツール105により保持したワークを作業ツール205の目標位置に搬送して位置決めするとともに、作業ロボット200がワークに対し所定の作業を行う際、ロボット制御装置300が、第1のロボットアーム110の先端部位又はワークに設けられた慣性センサ106において検出される慣性力に基づいて保持ツール105の位置ズレ量を検出し、検出した位置ズレ量ΔP1を用いて位置決めロボット100に異常が発生したか否かを検出する。
(もっと読む)
ロボットの制御方法
【課題】 ロボットと位置検出カメラ間の座標軸の回転方向のずれを修正するロボットの制御方法を提供する。
【解決手段】 XY平面上に設定した3点以上の計測位置と前記XY平面に垂直なZ軸方向に設定した2点以上の計測位置に対し、前記ロボットを操作し前記三次元位置計測装置によって前記各計測位置の位置座標を計測し、前記三次元位置計測装置の座標系における各計測位置の位置座標と前記ロボットの動作量に基づいて、前記三次元位置計測装置の座標系から前記ロボットの座標系への変換係数を算出し、前記三次元位置計測装置より計測した対象物の位置情報を前記変換係数によって変換し、この変換した値に基づいて前記ロボットを動作させる。
(もっと読む)
バックラッシュ算出装置、観察システム及びバックラッシュ算出プログラム
【課題】ヒステリシス特性を有するセンサを用いる場合でも正確なバックラッシュ値を算出する。
【解決手段】バックラッシュ算出装置は、センサプレート323が正転方向D1に移動する際に原点センサ324がセンサプレート323に反応してから反応しなくなるまでのセンサプレート323の移動量を示す値Cに基づいて、原点センサ324の反応状態がOFFからONに切り替わる位置と中心位置との間の距離を示す値xと、原点センサ324の反応状態がONからOFFに切り替わる位置と中心位置との間の距離を示す値yとを算出し、センサプレート323が逆転方向D2に移動する際に原点センサ324がOFFしてからONするまでのセンサプレート323の移動量を示す値zと、算出されたx、yとに基づいて、バックラッシュ値を算出する。
(もっと読む)
電子部品実装装置および電子部品実装装置におけるカメラ位置補正方法
【課題】部品の実装作業中における基板認識カメラや部品認識カメラによる画像の取り込みに際して校正マークが邪魔にならず、常に安定した位置ずれ補正を行なうことのできる電子部品実装装置を提供する。
【解決手段】座標系相互間の位置ずれ補正を行なうために必要とされる画像を基板認識カメラ2や部品認識カメラ4に取り込む間だけ透明な液晶表示パネル5に校正マーク12を表示し、画像の取り込み完了後には校正マーク12の表示を終了させて液晶表示パネル5を透明な状態に戻す。校正マーク12を支承する部材を着脱する必要がないので補正処理の実施が容易であり、校正マーク12を支承する部材の着脱によって校正マーク12の取り付け位置にずれが生じる不都合も解消される。
(もっと読む)
角速度または角度の検出方法及びロボットの制御方法
【課題】ドリフト現象による誤差と感度の変動による誤差とを較正する方法を提供する。
【解決手段】角速度センサーを用いた角度検出方法にかかわる。角速度センサーの姿勢を第1姿勢から第2姿勢へ変更し、その間の角速度センサーの出力を積分した第1出力積分16aと変更に要した第1経過時間17とを検出する。角速度センサーの姿勢を第2姿勢から第1姿勢と同じ姿勢の第3姿勢へ変更し、第1姿勢から第3姿勢13へ変更する間の角速度センサーの出力を積分した第2出力積分16bと第1姿勢から第3姿勢へ変更する間の第2経過時間18とを検出する。第2出力積分16bを第2経過時間18にて除算してオフセット補正係数を演算する。第1出力積分16aからオフセット補正係数と第1経過時間17との乗算値を引き算した第1正味出力積分19aを演算し、第1姿勢と第2姿勢との回転角度の差を第1正味出力積分19aにて除算して感度係数を演算する。
(もっと読む)
ロボット教示プログラム修正装置
【課題】ロボット教示プログラムを教示修正するのに必要な時間等を大幅に削減する。
【解決手段】ロボット教示プログラム修正装置(1)は、ワーク(20)の画像を取得する撮像部(6)と、プログラム(13)の各教示点の三次元位置と撮像部により取得されたワークの画像とに基づいて、ワークの画像上における各教示点の二次元位置を計算する二次元位置計算部(11a)と、ワークの画像とワークの画像上における各教示点の二次元位置とを表示する表示部(5a)と、ワークの画像における明暗差に基づいてワークのバリ取り箇所を自動的に抽出する抽出部(11b)と、教示点の二次元位置が、バリ取り箇所に一致するように変更する教示点位置変更部(11c)と、変更後のワークの画像上における各教示点の二次元位置とロボット教示プログラムの各教示点とに基づいて、プログラムの各教示点の三次元位置を変更するプログラム変更部(11g)とを含む。
(もっと読む)
位置測定方法及び位置測定装置
【課題】測定された対象物の位置データに基づいて得られる補正後のデータの精度を高める。
【解決手段】対象物を実測して得た位置データに基づき該対象物の位置の基準となるマスターデータに対する補正値を算出し、該マスターデータに補正値を加味した補正位置データに基づいて前記対象物の所定部位に作業を行う構成の装置に適用される位置測定方法であって、対象物の複数のサンプル各々に設けられている基準点の位置を測定して該基準点の位置データを取得する事前測定ステップと、該事前測定ステップで取得された前記各サンプルの基準点の位置データに基づいて前記マスターデータを事前に算出する事前算出ステップと、対象物に設けられている基準点の位置を測定して該基準点の位置データを取得する実測ステップと、該実測ステップで取得された前記位置データに基づいて前記事前算出ステップで算出されたマスターデータに対する補正値を算出する補正値算出ステップとを有する。
(もっと読む)
位置決め装置及び工作機械装置
【課題】電源投入時に現在座標を許容誤差範囲の精度で検出し、所定位置への復帰動作をすることなく電源投入時の位置から動作を開始できる位置決め装置を提供する。
【解決手段】固定部12に対する可動部8の相対位置を検出するためのインクリメンタルエンコーダ23とアブソリュートエンコーダ21とを備え、制御装置19は、インクリメンタルエンコーダ23及びアブソリュートエンコーダ21の信号データの対応データを記憶した記憶手段と、電源投入時に読み取られた前記アブソリュートエンコーダ21の信号データから可動部8の初期座標を求める初期座標読取手段25と、電源投入時以後に読み取られたインクリメンタルエンコーダ23の信号データを基に可動部8の現在座標を求める現在座標読取手段25と、対応データによりインクリメンタルエンコーダ23の信号データに変換する信号変換手段と、を備えている。
(もっと読む)
ワーク寸法計測装置および工作機械
【課題】 ワークの材質および環境温度に応じた、より正確な補正値または補正係数を生成することができるワーク寸法計測装置および工作機械を提供する。
【解決手段】 計測器20と、計測器20で計測された計測値を補正値または補正係数で補正して計測出力値とする計測データ補正手段21とを備え、計測データ補正手段21は、計測器20が設置される環境温度の情報と、ワークWの材質の温度による熱変化量との関係を設定した材質別熱変化量設定手段22と、計測対象のワークWの材質の情報および環境温度の情報を入力する材質・環境温度入力手段23と、材質・環境温度入力手段23で入力されたワークWの材質の情報および環境温度の情報を、材質別熱変化量設定手段22の設定内容に照らして補正値または補正係数を生成する補正値生成手段24とを有する。
(もっと読む)
カメラとロボット間のキャリブレーション方法及びその装置
【課題】工数削減を実現するカメラとロボット間のキャリブレーション方法及びその装置。
【解決手段】3次元カメラを有する視覚装置が固定されたロボットを、ロボットの座標系である直交座標系の2つの座標軸に対して回転させ、回転に対応した2つの同時変換行列を求める段階と、2つの同時変換行列から、等価回転軸の単位ベクトルと、等価回転軸に対する回転角とをそれぞれ演算する段階と、2つの同時変換行列から、それぞれの回転による視覚装置の始点と終点を直線で結ぶことにより定義される2つの視覚装置移動ベクトルを演算する段階と、回転角と視覚装置移動ベクトルと単位ベクトルから等価回転軸の位置を演算する段階と、2つの等価回転軸の座標系を変換し共通にすることによりロボットの座標系の座標軸を演算する段階と、変換した2つの等価回転軸の交点であるロボットの座標系の原点を演算する段階と、を有する。
(もっと読む)
非真円形状加工装置
【課題】より高精度での加工が可能な非真円形状加工装置を提供する。
【解決手段】非真円形状加工装置において、工具7は、工具移動機構によりX軸方向に往復移動する。この工具移動機構の非可動部であるサドル11に第一加速度センサ6が設けられている。また、ワーク1を保持回転させる主軸の主軸軸受5には、第二加速度センサ15が設けられている。そして、この二つの加速度センサ6,15で、サドル11およびワーク1の変位量を計測し、得られた二つの変位量に基づいてワーク1と工具7間の相対距離の変位量を相対変位量として取得する。そして、この得られた相対変位量とX軸リニアスケール12の出力値とに基づいて工具7の位置を算出する。
(もっと読む)
1 - 15 / 15
[ Back to top ]