
Fターム[3C269MN13]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 動作位置、動作範囲の監視 (324) | 指令値との偏差の監視 (22)
Fターム[3C269MN13]に分類される特許
1 - 20 / 22
位置制御装置
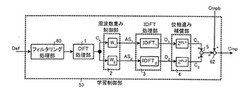
【課題】繰返し学習制御部を持つ位置制御装置において、位置偏差に多様な高調波成分が含まれる場合にも、繰返し学習制御によって、位置偏差の高い減衰性と、迅速な収束性を達成する繰返し学習制御機能を持つ位置制御装置を提供する。
【解決手段】位置偏差を離散フーリエ変換して得られたフーリエ係数ベクトルに、複数の周波数重み係数を乗じることで、周波数帯域別に成分分割し、成分毎に離散フーリエ逆変換した信号データに、最適な位相進み補償を与え加算することで、学習時の補正値データを構成する。
(もっと読む)
マスタ軸とスレーブ軸との同期制御を行うモータ制御装置

【課題】マスタ軸を駆動するマスタ軸モータとスレーブ軸を駆動するスレーブ軸モータとを正確に同期制御することができる、小型で低価格のモータ制御装置を実現する。
【解決手段】マスタ軸を駆動するマスタ軸モータ14とスレーブ軸を駆動するスレーブ軸モータ54とを同期制御するモータ制御装置1は、マスタ軸の位置データと所定一定周期の基準信号とを出力するマスタ軸位置検出器11と、マスタ軸位置検出器11が出力した位置データと基準信号とを受信するマスタ軸受信回路13と、マスタ軸受信回路13が受信した位置データと基準信号を受信した時点の位置データとの差分を、マスタ軸差分として算出するマスタ軸演算回路13と、マスタ軸差分をマスタ軸モータ14の動作と同期を取るための信号として用いてスレーブ軸モータ54の動作を制御するスレーブ軸モータ制御部55と、を備える。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
ロボット制御装置および制御方法
【課題】角度センサから正常に回転角度が取得できなくなった場合に、迅速にサーボモータを停止させることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、角度センサ160から取得した回転角度に応じてサーボモータの駆動をフィードバック制御する第1の駆動制御部と、サーボモータの電気的変量に基づいてサーボモータの回転角度および回転速度を推定する推定部と、推定された回転角度に応じて、サーボモータの駆動をセンサレス制御する第2の駆動制御部と、サーボモータに対して発電制動を行う発電制動部とを備える。ロボット制御装置200は、角度センサ160の異常を検出すると、推定回転速度が所定の閾値以上の場合には、第2の駆動制御部によってサーボモータを減速させ、推定回転速度が所定の閾値未満の場合には、発電制動部によってサーボモータに発電制動を行う。
(もっと読む)
加工精度を指標化する機能を備えた数値制御装置
【課題】大容量のハードウェア資源を必要とせず、単純な処理で精度悪化等のデータの確認が可能な数値制御装置を提供する。
【解決手段】数値制御装置10は、加工プログラムに従ってサーボモータ12に指令パルスを与えるパルス指令部14と、該指令パルスとサーボモータ12に取り付けたエンコーダ16等の位置検出器による位置フィードバックパルスとの偏差を求めて、サーボモータ12の位置ループ制御を行う制御部18と、加工プログラムの運転中に、サーボモータ12への指令パルスとフィードバックパルスとの差の絶対値を所定周期毎に積算する積算部20と、積算部20により積算された値を、加工精度を表す指標として加工プログラムと対応付けて記憶する記憶部22とを有する。
(もっと読む)
周期的な往復動作を制御するサーボモータ制御装置
【課題】周期的に往復動作を行う被駆動体についての角度同期方式の学習制御を可能にするサーボモータ制御装置を提供する。
【解決手段】学習制御器12は、被駆動体14の第1の位置偏差ε1を所定のサンプリング周期毎に取得し、第1の位置偏差ε1は第1変換部30において、周期的な往復動作を行う被駆動体14の1周期分の基準位置毎の第2の位置偏差ε2に変換される。第2の位置偏差ε2は、メモリ32に記憶された被駆動体14の往復動作の1周期前の第1の補正量が加算された後、新たな第1の補正量δ1としてメモリ32に記憶される。第1の補正量δ1は第2変換部34において、サンプリング周期毎の第2の補正量δ2に変換される。
(もっと読む)
工作機械のピッチ誤差補正方法及びピッチ誤差補正装置
【課題】 所望の加工精度誤差を確保可能な工作機械のピッチ誤差補正方法及びピッチ誤差補正装置を提供すること。
【解決手段】 出荷前の調整段階において制御装置50が、入力した1〜25ポイントのピッチ誤差測定値P0からピッチ誤差補正値P1を算出しテーブルに登録する。出荷先で、制御装置50が、1〜25ポイントのピッチ誤差補正値P1と、顧客が入力したオフセット値をRAM53から読み出し(S10)、このオフセット値を1〜25ポイントのピッチ誤差補正値P1に夫々加算することでピッチ誤差補正値P1を更新する(S11)。
(もっと読む)
ロボットオフライン表示装置
【課題】効率的に干渉チェックを行うことができるロボットオフライン表示装置を提供する。
【解決手段】ステップS3において、干渉チェックを行うべきロボットの位置姿勢についての干渉チェック結果が存在していれば、ステップS4に進んで当該干渉チェック結果を採用する。また干渉チェックを行うべきロボットの位置姿勢と同一の位置姿勢が過去のデータに含まれていない場合でも、周辺機器との干渉チェックの結果が記録されているロボットの位置姿勢の中に、干渉チェックを行いたいロボットの位置姿勢との差分が指定範囲内のものがあれば、その干渉チェック結果を採用する。
(もっと読む)
数値制御工作機械
【課題】移動指令における指令値とフィードバック値と加工負荷のタイムチャートと、加工プログラムとを対応付けて同一画面に表示可能にした数値制御工作機械を提供する。
【解決手段】数値制御工作機械は、工作機械の送り軸を駆動する送り軸駆動手段と、工具が取り付けられた主軸を回転駆動する主軸駆動手段と、加工プログラムに基づいて前記送り軸駆動手段と前記主軸駆動手段とを制御する制御手段と、表示手段とを備え、加工プログラムに基づきワークを加工中に、各移動指令で指令された移動における指令値、FB値、加工負荷の時系列データをリアルタイムで取得し、指令値とFB値と加工負荷のタイムチャートと加工プログラムとをディスプレイの同一画面に対応付けて表示させる。
(もっと読む)
理論機械位置算出手段を有する数値制御装置
【課題】理論的な機械位置と実際の機械位置の差分を検出する機能を備えた数値制御装置を提供すること。
【解決手段】
機械を駆動する軸の制御と位置検出を行うサーボ制御部2へ軸移動を指令する指令部1を有する数値制御装置において、サーボ制御部2は、実際の機械位置を検出する検出手段203を備え、指令部1は、機械座標指令位置D1から、加減速による出力の遅れ量D2、およびサーボ制御部2の出力の遅れ量FBを差し引いた理論上の機械位置を算出する理論機械位置算出手段103と、理論機械位置算出手段103で算出された値D4とサーボ制御部2で検出された実際の機械位置D3との差を算出する機械位置差分算出手段104と、機械位置差分算出手段104で算出した値を予め定められた値と比較する機械位置差分監視手段106と、機械位置差分監視手段106で比較した値が予め定められた値を超えた時、軸移動を停止する手段110とワーニングを出力する手段107の少なくとも一方を備えた数値制御装置。
(もっと読む)
工作機械の制御装置及び方法
【課題】工作機械の駆動を停止して省エネ制御した際に、垂直軸駆動源の発熱を抑えて機械加工精度の劣化を防止すると共に主軸や工具がワークに干渉することを防止する。
【解決手段】工作機械を省エネ制御するための制御装置20は、停止時に基準点移動手段23によって主軸をX軸、Y軸、Z軸の3軸方向に予め設定された有効範囲内の基準点位置として原点に保持し、主軸をX軸またはZ軸方向でワークと干渉しない位置に保持させる。タイマ24で省エネモード開始のための設定時間を計測した後に、Y軸駆動源停止手段21yでY軸サーボモータMyへの通電を遮断すると共にブレーキ装置13を作動させる。位置監視手段25によって主軸のY軸方向の位置ズレ量を検知し、検知した主軸の基準点位置からの位置ズレ量が有効範囲内か否かを判別手段31で判別する。主軸の位置ズレ量が有効範囲を外れた場合に解除手段32で省エネモードを解除する。
(もっと読む)
ワーク設置誤差補正手段を有する数値制御装置
【課題】ワークを設置した時の設置誤差を補正するワーク設置誤差補正手段を備える数値制御装置を提供する。
【解決手段】5軸加工機を制御する数値制御装置は、テーブルにワークを設置した時の設置誤差を補正するワーク設置誤差補正手段を備える。ワーク設置誤差補正手段は、指令数値に基づいて工具の指令座標系上の位置と方向とを計算する工具位置方向計算手段と、該工具位置方向計算手段で計算された工具の指令座標系上の位置と方向とを保つようにあらかじめ設定した誤差量によって直線軸3軸と回転軸2軸に対する誤差補正を行う誤差補正手段と、該誤差補正手段の中の三角関数の計算において解が複数存在した場合に該誤差補正によって補正された回転軸2軸の位置は該工具位置方向計算手段において計算した工具の指令座標系上の方向に近い解を選択する解選択手段を備えている。
(もっと読む)
ロボットプログラム調整装置
【課題】試行錯誤を行うことなしに、負荷の大きい軸に掛かる負荷を軽減する。
【解決手段】複数の軸を有するロボットアームの動作プログラムを調整するロボットプログラム調整装置(11)が、ロボットアームの動作プログラムから動作命令を順次読込んでシミュレーションを実行することにより、過負荷が掛かる軸を複数の軸から特定する過負荷特定手段(12)と、過負荷特定手段により特定された軸以外の軸に対して付加的な動作を生成して、特定された軸の負荷を軽減する付加的動作生成手段(13)と、付加的動作生成手段により生成された付加的な動作に基づいてロボットアームの動作プログラムを調整するプログラム調整手段(15)とを含む。
(もっと読む)
加工装置及び加工方法
【課題】ツールを交換した場合でも加工のずれを生ずることなくワークを加工する、加工装置及び加工方法を提供する。
【解決手段】加工装置のワーク取付部2にダミーワーク取付治具12が設けられ、ダミーワーク取付治具12には被加工物としてダミーワーク13が取り付けられている。制御部11がツール8に異常が発生したと判断した場合、例えば、センサ(図示なし)がツール8の破損等により発生する異常振動を検出して異常の発生を示す信号を制御部11に供給した場合には、制御部11は加工装置を非常停止させる。その後に、ツール8を良品に交換する。そして、新ツールによってダミーワーク13を加工し、旧ツールと新ツールとの間の位置ずれを補正するための補正量を制御部11が演算し、その補正量に基づいてワーク4に対して新ツールを位置合わせする。
(もっと読む)
誤差過大検出機能を有する制御装置
【課題】フィードフォワード制御が導入された制御装置の位置偏差異常をいち早く検出する。
【解決手段】位置偏差推定処理部40において、例えば式V/PG×(1−α)(ただし、V:位置指令の1階微分値、PG:位置制御器16におけるポジションゲイン、α:フィードフォワード項算出部32におけるフィードフォワード係数)により位置偏差推定値Errを算出し、それにマージンΔEを加算した誤差過大検出レベルにより位置偏差の異常を検出する。
(もっと読む)
数値制御装置
【課題】 ワークを回転させる主軸の実速度に同期して、前記ワークを加工するための工具を移動させる送り軸の送り速度を指令することにより、ねじ切り加工を行う数値制御装置において、加工されたねじの精度を容易に把握する必要があった。
【解決手段】 送り軸の理想移動量と送り軸の実際の移動量を算出するとともに、この算出された理想移動量と実際の移動量の誤差を算出し、この算出された誤差を監視または検証することにより、加工されたねじの精度を容易に把握できるようにした。
(もっと読む)
ロボット安全監視装置及びロボット駆動制御システム
【課題】不必要な非常停止の発生を抑制すると共に、ロボットの教示基準点の現実の移動軌跡が動作許可領域内に存在するか否かの判断をより確実に実施して安全性を向上させる。
【解決手段】ロボットの教示基準点の実空間上における指令座標が、ロボットの各軸を駆動するモータの動作変位量に関する指令値に基づいて算出される。指令座標が、動作許可領域内に存在するか否かが判定される。各軸の実際値から実空間における教示基準点の実際座標が演算され、現在時刻から過去所定数分の指令座標を時系列順に結ぶことによって得られる指令経路までの、現在の実際座標から計った距離に基づいて、実際値と指令値との関係が適正か否かが判定される。指令座標が前記動作許可領域内にないと判定された場合、又は、実際値と指令値との関係が適正でないと判定された場合の何れかの場合には、ロボットを安全な状態にするための非常停止信号が出力される。
(もっと読む)
工作機械におけるワークの切削加工方法
【課題】工作機械の運転方法に関し、工具がワークに食い付くときのピーク負荷による工具の折損を防止し、送り速度を低くすることによって生ずる加工時間の無駄をなくす。
【解決手段】工具送りモータ4のトルクを定常トルクより低い値に制限して、すなわち、工具の送り力を低くして、定常送り速度で工具をワークに接近させ、工具とワークとの接触が検出されたときに、トルク制限を外すとともに工具送り速度を低くして工具をワークに食い付かせ、そのあと低くした工具送り速度を定常送り速度に戻す。トルク制限は、モータに供給する電流値を制限することによって行われる。工具とワークとの接触の検出は、工具送りモータの電流値の変化や、工具送りモータの制御系に生ずる位置偏差の変化によって検出する。
(もっと読む)
ロボット制御装置
【課題】サーボ制御部の異常を迅速かつ的確に検出すること。
【解決手段】監視部7は、二つの演算処理部10,11を有し、各演算処理部は、制御情報からロボットの位置を推測する位置推測手段10,11と、他の演算処理部における推測されたロボットの推測位置を取得する推測位置取得手段10,11と、推測したロボットの推測位置と取得したロボットの推測位置とが一致するか否かを判断する推測位置一致判断手段10,11と、ロボットの推測位置が一致すると判断された場合に、推測位置と検出されたロボットの現在位置との差を算出する位置差算出手段10,11と、算出された位置の差が所定値以上である場合又はロボットの推測位置が一致しないと判断された場合に、切り替え部5,6によりサーボモータに対する電力の供給を遮断する電力遮断手段10,11と、を備える。
(もっと読む)
サーボモータの制御方法
【課題】象限突起を補正しつつ、ボールネジが反転する際のフリーゾーンによって変化する摩擦に対してもトルク変化が追従するように適切な補正を行うことが可能なサーボモータの制御方法およびサーボモータの制御装置を提供する。
【解決手段】サーボモータにより円弧補間送り運動をされる移動体の位置を直接または間接に検出し、前記移動体の位置を位置指令に追従させるフィードバック制御を行うサーボモータの制御方法において、前記移動体の運動方向が切り換わる象限切換時のトルク指令値に対し、前記運動方向が切り換わった位置からの距離に応じたトルク補正を行う。特に切換時に静摩擦補正用の第1のトルク補正値を与え、フリーゾーン経過後の距離から動摩擦補正用の第2のトルク補正値を与えることで適切なトルク補正が可能となる。
(もっと読む)
1 - 20 / 22
[ Back to top ]