
Fターム[3C269QC01]の内容
Fターム[3C269QC01]に分類される特許
321 - 335 / 335
工具パラメータをコンピュータ支援生成するための方法、データ処理システム、およびコンピュータプログラム、ならびにデータキャリア

【課題】成形プロセスによりシートメタル成形部品を製造するための工具に関する、コンピュータ支援方法。
【解決手段】部品10の形状モデルにおいて、部品10の形状特性11−15の組を決定するステップを含み、形状特性の各々は特性の種類と形状パラメータにより記述される。方法基準は各々の形状特性を製造するための形態を記述する。形状特性に関連する方法基準の選択は当該特性の種類に依存する。方法基準は少なくとも1つの処理ユニットを表わすモジュールを含み、どの処理ユニットが実行されるかを記述する。方法はモジュールの各々について構成要素を決定するステップを含む。構成要素はモジュールを実現するのに必要な工具について記述し、形状特性の形状パラメータから構成要素パラメータを決定するステップを含む。構成要素パラメータは当該構成要素の、または各々の工具の形状パラメータを含む。
(もっと読む)
機械モデルを組み込まれた制御装置
生産機械(1)が、制御装置(16)によって、制御装置(16)に格納されている制御プログラム(18)に応じて制御可能である。生産機械(1)が少なくとも2つの要素を有し、2つの要素がインターフェースに互いに接続されている。制御装置(16)内に、変更要素の要素記述が格納され、要素記述は、どの要素(26)が互いに接続可能であるかを制御装置によって求め得るように、それぞれ、存在するインターフェースの少なくとも1つのリストを有する。制御装置(16)内には、生産機械(1)がどの要素を有しかつ要素がどのインターフェースを介して互いに接続されているかを少なくとも含む目標構成記述が格納されている。制御装置(16)はオペレータインターフェース(22)を有し、オペレータインターフェース(22)を介して目標構成記述が生産機械(1)のオペレータ(23)によって要求可能であり、要求に応じてオペレータ(23)に出力可能であり、かつオペレータ(23)によって変更可能である。  (もっと読む)
(もっと読む)
部品搭載プログラム作成システム

【課題】作業能率のよい部品搭載プログラム作成システムを提供する。
【解決手段】部品搭載プログラムを作成又は編集するときに、ライン管理装置のディスプレイで行うときも部品搭載装置の操作入力用表示装置で行うときも同一の画面が表示され同一の入力操作で処理が進行する。例えば部品マスターの編集作業では、先ず実装機・実装支援ソフトメイン画面が表示され(S201)、その8種類の処理作業メニューの中の「部品マスタ作成」のメニューを選択すると部品マスターコード一覧画面が表示される(S202)。ここで画面左側に形状や型番によりツリー構造で表示される部品コードの中から所望の部品コードを選択し、画面の右側に表示させて選択が正しいことを確認し、その部品コードをクリックすると、部品マスター編集画面が表示される(S203)。これで所望の部品に関するデータ入力又は修正を行うことができるようになる。
(もっと読む)
ロボット言語処理装置
【課題】ロボット言語の表示・編集を行う際に教示装置やプログラミングペンダントに表示されるのは、従来、ロボット言語の中間コードをキャラクタ表現に変換したものだけであり、ロボットの動作を直感的に把握することができず、言語の習得に時間を要し、教示後にロボットを実際に動かして作成したプログラムの正当性を確認する必要があった。
【解決手段】グラフィカル表示が可能でありポインティングデバイスによってその表示画面中の位置を指定できる表示装置と、ロボットプログラムを格納するメモリと、ロボットプログラムを参照して、作業区間及びエアーカット区間を連続した線として表示装置に表示し、ポインティングデバイスにより表示画面に表示中のいずれかの線が指定されたときには、その線における作業内容の種類を表示画面に表示するグラフィカル言語処理部とを設け、グラフィカル・ユーザ・インタフェースに基づく教示を可能にする。
(もっと読む)
柔軟なディスプレイを備えた操作盤
【課題】従来相当の操作キー及びディスプレイ機能を維持しつつ、さらなる小型化を図ることができる操作盤を提供する。
【解決手段】操作盤10は、フレキシブルディスプレイ12、複数の操作キー14及びフレキシブルディスプレイ12をロール状に巻いた状態で格納可能な格納部16を有する。フレキシブルディスプレイ12は、第3操作キー14cを使用しない第2の操作モードにおいて、画像表示領域をより広くするために、第3操作キー14cを覆う第2の位置まで格納部16から引出されることができる。
(もっと読む)
複合テープコースを規定するコンピュータで実現される方法、複合テープコースを規定するためのコンピュータプログラムプロダクトおよびテープコース生成機
【課題】比較的複雑な表面にテープコース定義を効率的に生成できる方法および装置を提供する。
【解決手段】テープコース生成機はCNC複合テープ積層機械をプログラムする際の使用のためのテープコース定義を生成する。テープコース生成機は外形付きの表面をパラメトリック基準表面にマッピングする基準表面パラメータ化機と、基準表面を基準面にマッピングする基準面インスタンス化機とを含む。テープコース生成機はテープ境界を描くテープ境界プロッタと、テープ境界および層境界を基準面にマッピングする境界マッパーとをさらに含む。さらに、テープコース生成機は層境界とテープ境界との交点を識別する交点ロケータと、テープ切断を規定し、基準面のどの点がテープコース内にあるかを判定するテープコースデリミタとを含む。さらに、テープコース生成機は規定されたテープコースをマッピングして外形付きの表面に戻すテープコーストランスフォーマを含む。
(もっと読む)
機器制御装置
【課題】 通信処理時間を短縮すると共に、小型で低コストの機器制御装置を提供する。
【解決手段】 演算装置21と、主記憶装置22と、外部記憶装置23と、電源装置24と、表示器兼タッチパネル入力装置8と、キーボード10や入力装置13や上位コントローラ11と接続するための外部インターフェース14と、pci規格拡張バス9を有し、加工対象物を乗せた機械を制御するパネルコンピュータを使用した機器制御装置1において、機械を動作させるサーボアンプ5、インバータ7、入出力モジュール6等の周辺機器を制御するpci規格拡張型モーションコントローラ部2と、加工対象物の画像を入力し、位置情報、あるいは寸法情報、形状情報、濃淡情報等の加工に必要とされる画像情報を演算し演算結果をpci規格拡張型モーションコントローラ部2に出力するpci規格拡張型ビジョンシステム部3とを備える。
(もっと読む)
マルチヘッド複合材料使用機械を動かすプログラムを作成する方法、マルチヘッド複合材料使用機械をプログラムするためのコンピュータプログラムプロダクト、およびマルチヘッド複合材料使用機械を動かすプログラムを作成するための複合部品プログラムポストプロセッサ
【課題】複合部品プログラムを効率的に作成できる方法および装置を提供する。
【解決手段】コンピュータ数値制御(CNC)マルチヘッド複合材料使用機械とともに使用するための複合部品プログラムを作成する複合部品プログラムポストプロセッサ。ポストプロセッサは定義受信器、ルートデリニエータ、接近および離脱プロファイラ、機械軸解コンピュータおよび出力ファイルコンポーザを含む。定義受信器はたとえば複合部品プログラム生成器から材料使用経路定義を受取る。ルートデリニエータはツールキャリッジおよび製造ツールのルートを描く。さらに、接近および離脱プロファイラは接近および離脱のプロファイルを経路に追加し、機械軸位置コンピュータは機械軸位置を計算して複合材料使用機械を制御しかつ複合材料使用ヘッドを経路に沿って案内する。出力ファイルコンポーザはCNC複合部品プログラムを組合せる。
(もっと読む)
ティーチングペンダント
【課題】ロボットやティーチングペンダントを目視することなく、人間がロボットの動作状況を知覚できること。
【解決手段】ティーチングペンダント300に、アクチュエータ(サーボモータ107)を備え、ロボットの制御情報104に基づいた情報を、サーボ指令入力部301で選択等をおこなったうえで、サーボ制御部110に情報を送出し、これをもとにサーボ制御部110がアクチュエータを回転させる。これにより、人間がダイヤル108の触覚によりロボットの動作状況を知覚することができる。
(もっと読む)
動作制御操作盤
【課題】熟練の作業者でなくとも簡単に操作を行うことができる動作制御操作
盤を提供すること。
【解決手段】入力手段および出力手段の双方の機能を有するタッチパネル15
上に構成される複数の各個動作用の操作ボタンを、シーケンス・コントローラに
おける運転条件および起動条件を満足しているか否かに応じて、運転条件を満た
さない時、運転条件は満たすが起動条件を満たさない時、運転条件および起動条
件の双方を満たす時の3つの状態を視覚的に区別して表示をするようにした。
(もっと読む)
運動学的特異点補償システムおよび方法
処理通路における運動学的特異点を処理するシステムおよび方法が開示されている。1実施例では数値制御(NC)処理システムは、 予め定められた処理通路に沿ってリンクの先端部を位置させるように動作する多軸運動リンクを有する材料処理装置を含んでいる。システムはまた、処理通路における特異点を検出するように動作し、特異点の近くにおける先端部の位置の正確度を改善するように動作する補償システムを有するプロセッサを具備している。 (もっと読む)
機械の作業進行を可視化するための表示ユニットを有する工作機械または生産機械
本発明は工作機械または生産機械に関し、その機械は機械の作業進行およびパラメータ又はそのいずれか一方を可視化するための表示ユニット(4、5)を有し、表示ユニット(4、5)として投影ディスプレイ(4)が設けられている。この表示ユニットは、工作機械または生産機械のオペレータに従来の表示ユニットまたは操作盤にくらべて改善された可視化およびインプットを可能にする。 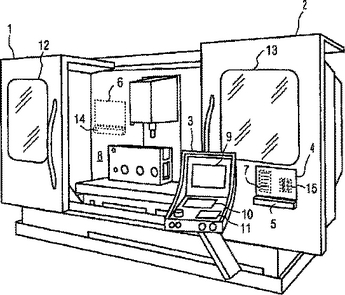 (もっと読む)
(もっと読む)
回転機械の制御指令自動発生装置及び方法
【課題】回転機械を駆動させる制御プログラムの自動的発生を、情報の対話的入力により可能にする装置及び方法を提供する。
【解決手段】回転機械上に設けられ、回転機械の対する制御指令を発生する処理ステーションであって、その入力及び表示端末が、
第一メニューレベルにて回転機械上に区分を選択及び/又は決定する可能性を提供し、
第1にメニューレベルで選択された区分に関して、回転機械及び/又は処理ステーションの機能を第2のメニューレベルで表示し、ここでこれ等機能は選択、且つ区分内で制御可能であり、
斯く規定された機能及びそれ等の区分内制御に基づいて制御指令を発生するように構成される手段を含んで成る処理ステーション。
(もっと読む)
デバッグ機能を有する機械の制御部
本発明は、機械(3)の制御部(1)、エンジニアリングシステム(11)、および制御部の駆動方法に関する。機械(3)を制御および/または調整するために設けられた、機械(3)の制御部(1)であって、該制御部(1)は少なくとも1つのユーザプログラム(5)を実行するために設けられており、前記ユーザプログラム(5)は、少なくとも1つの機能(7)を実行するために設けられており、前記制御部はデバッグ機能を有する。ユーザプログラム(5)が大きいと、デバッグ機能の機能性が、デバッグ機能が非常に複雑で、見通せないため制限される。本発明によれば、前記ユーザプログラム(5)が1つまたは複数のホールドポイント(9)をデバッグ機能のために有し、該ホールドポイント(9)はアクティベートおよび/またはデアクティベートすることができる、ことにより機能性が改善される。有利には機能(7)を群(13)にまとめることができ、これによりホールドポイント(9)を群ごとにアクティベートおよびデアクティベートすることができる。  (もっと読む)
(もっと読む)
機械、特に生産機械における位置案内されて移動可能な付加要素の付加位置目標値のコンピュータ支援による決定方法
コンピュータ(11)が空間内の1つの予め定められた基本軌道に従ってその都度1つの基本位置目標値(G*)を求める。従って、機械の基本要素(4)に設定されると、基本要素(4)は基本軌道に沿って位置案内されて移動される。更に、コンピュータ(11)がその都度の基本位置目標値(G*)に基づいて空間内の対応する現在の付加終端位置(Z4)が求める。コンピュータ(11)が空間内の予め定められた固定の付加始端位置(Z1)および現在の付加終端位置(Z4)に基づいてその都度1つの付加位置目標値(Z*)も求める。従って、機械の付加要素(2)に設定されると、付加要素(2)が付加始端位置(Z1)から出発して現在の付加軌道に沿って位置案内されて現在の付加終端位置(Z4)へ移動される。  (もっと読む)
(もっと読む)
321 - 335 / 335
[ Back to top ]