
Fターム[3C269QC01]の内容
Fターム[3C269QC01]に分類される特許
201 - 220 / 335
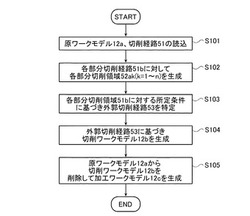
ワークモデル生成方法、及びそのプログラム
【課題】演算時間の浪費を抑制し、且つ演算エラーを抑制したワークモデル生成方法、及びそのプログラムを提供する。
【解決手段】ワークモデル生成方法は、削り刃によって切削する経路を示す切削経路の外郭部である外郭切削経路を特定する外郭切削経路特定ステップと、外郭切削経路にて囲まれる面を含んで構成される所定厚みの切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成する加工ワークモデル生成ステップとを備える。このように、外郭切削経路にて囲まれる切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成するので、切削経路全体について切削ワークモデルを生成する必要がなく、演算時間の遅延を抑制することができる。
(もっと読む)
ロボットの動作余裕量演算表示方法及びその装置

【課題】ロボットの動作可能な領域をオペレータや生産ラインの現場作業者に対して直感的に認識できる態様で定量的に通知する。
【解決手段】ロボット1の教示プログラムに含まれる複数の教示点のそれぞれについて、ロボット1の位置姿勢を示す複数のパラメータのうちの1個又は複数個を変化させて、ロボット1の各関節θ1〜θ6の動作範囲内で教示点から連続して動作可能な領域を示す動作余裕量を計算する(ステップS2−2)。各教示点の動作余裕量を数値で定量的に表示する(ステップS2−3)。
(もっと読む)
アラーム情報を表示する機能を有する数値制御装置
【課題】アラームになった要因を数値制御装置に記憶したデータを使用して表示装置に具体的に表示するようにし、アラームが発生した際に顧客(ユーザ)が問題を解決するのに必要な工数を削減すること。
【解決手段】プログラムの実行中のアラーム発生時に実行していたプログラム番号、プログラムブロックの指令内容、アラームの判定に使われたデータを、数値制御装置内に記憶するアラーム情報記憶手段Gと、各アラームに対応するアラームの判定内容を記載したアラーム要因メッセージの雛形を記憶しているアラーム要因メッセージのアラーム要因メッセージ雛形記憶手段Iと、アラーム情報記憶手段Gに記憶されたアラーム情報を、対応する前記アラーム要因メッセージの雛形に組み入れる組み入れ手段Hと、組み入れ手段Hによって完成されたアラーム要因メッセージの表示を行う表示手段(J、K)と、を備えたアラーム情報を表示する機能を有する数値制御装置。
(もっと読む)
コントローラ装置
【課題】 信号コード接続端子31,32と電源コード接続端子41,42とがコントローラ装置の背面において不規則に配列されている場合、コントローラ装置へコード類を取り付けるにあたり、どのコードをどの端子に接続すれば良いのか判別しにくいという問題があった。
【解決手段】 操作面上に配置された操作キーと端子部とを対応させて配置するので、操作面の操作キー配置を確認することで、複数の制御対象機器を同一のコントローラ装置に接続する場合であっても、どの制御対象機器と端子部が対応するのかを判別可能とした。
(もっと読む)
5軸加工機を制御する数値制御装置
【課題】工具先端点位置と工具姿勢の変化が小さいブロックのプログラム指令を間引き、工具の小さいぶれを取り除くことによって、加工形状を滑らかにし加工時間を短縮することが可能な、5軸加工機を制御する数値制御装置を提供すること。
【解決手段】加工プログラムであるNCプログラムのブロックは、指令読み取り手段1で解析され、間引き手段2を介して所定の間引き処理がなされ、所定の間引き処理がなされた直線軸機械座標位置と回転軸の回転位置に対して補間手段3により移動経路上を指令された相対移動速度で移動するように補間周期毎に各軸位置を求める補間処理がなされ、補間処理されたデータに基づき各軸のサーボ4X、4Y、4Z、4B(A)、4Cの各軸が制御される。
(もっと読む)
マイクロマシンやマイクロフライスマシンの工具長補間方法
【課題】非接触でワーク支持台および刃物台を原点復帰させるとともに、原点復帰した状態のワークと刃物との間の水平方向の距離を自動的に測定することができるマイクロマシンの工具長補間方法を提供する。
【解決手段】ワークを支持するワーク支持台25を、原点復帰センサー33,34を用いて原点に位置させる工程と、刃物台9を、原点復帰センサーを用いて原点に位置させる工程と、この刃物台を原点に位置させる工程で刃物台が原点に位置するとともに、前記ワーク支持台を原点に位置させる工程でワーク支持台が原点に位置した所で、前記刃物台に支持されている刃物工具8の先端部と前記ワーク支持台に支持されているワーク原点との間の水平方向の距離を、ベース板5にアーム35を介して設けられたCCDカメラ36を用いて測定する測定工程とでマイクロマシンの工具長補間方法を構成している。
(もっと読む)
数値制御装置及び数値制御装置用制御プログラム
【課題】 工作機械の数値制御装置及び数値制御装置用制御プログラムに関し、工作機械の主軸に装着された工具がセンター孔付き工具ではないと判断した場合に、冷却液供給手段による冷却液の供給を停止させるように制御できること。
【解決手段】 読み込まれた加工プログラムの制御コマンドに基づいて、現在主軸に装着されている工具がセンター孔付き工具か否かを判断し、主軸に装着されている工具はセンター孔付き工具ではないと判断した場合に(S3;No)、冷却液供給手段による冷却液の供給を停止させ、アラームメッセージをディスプレイに表示させた後(S11)、プログラム修正モードへ移行しこの処理を一時的に停止する(S12)。
(もっと読む)
数値制御装置
【課題】 タッチパネル付きの操作表示パネルと着脱式の着脱表示パネルを設け、着脱表示パネルを接続したときは操作表示パネルを入力手段とし、着脱表示パネルを接続していないときは操作表示パネルを入力手段及び表示手段として活用可能にし、操作表示パネルの入力手段としての操作性を向上させることのできる数値制御装置を提供する。
【解決手段】 マシニングセンタ1を制御する制御装置7は、着脱表示パネル8がマシニングセンタ1に接続されたことを検知した場合には、設定された作動モードに対応するキーやスイッチを最適な配置パターンで操作表示パネル9に、表示画面を着脱表示パネル8に夫々表示させ、着脱表示パネル8がマシニングセンタ1に接続されていないことを検知した場合には、設定された作動モードに対応する表示画面及びキーやスイッチを最適な配置パターンで操作表示パネル9に表示させる。
(もっと読む)
ロボットシミュレーション装置
【課題】ロボットの軌跡のうちのどの場所で信号出力が行われるかを表示する。
【解決手段】ロボットシミュレーション装置(10)が、ロボット(22)のモデルを表示する画面(17)と、ロボットの動作と信号出力とが記述されたプログラムをシミュレーションにより実行するシミュレーション手段(31)と、シミュレーション手段によりプログラムを実行したときのロボットの位置および信号出力の位置を時系列に算出する位置算出手段(32)と、位置算出手段により算出されたロボットの位置および信号出力の位置を時系列に記憶する記憶手段(13)と、記憶手段に記憶されたロボットの位置を時系列に画面上に表示する位置表示手段(35)と、位置表示手段により画面上に表示されたロボットの位置を結んだロボットの軌跡上に、記憶手段に記憶されたロボットの信号出力の位置を表す指標を表示する指標表示手段(36)とを含む。
(もっと読む)
移設防止機能を有する数値制御装置
【課題】機械の移設に伴って発生する機械の振動を数値制御装置に内蔵される加速度センサによって検知し機械の移設防止機能を実現すること。
【解決手段】数値制御装置に搭載されるシステムLSI1は、機械を移設する際に発生する振動による加速度を検出する加速度センサ4、加速度センサ4の出力信号であるアナログ信号をデジタルデータに変換するAD変換器5、MPU6、AD変換器5からのデジタルデータをMPU6の制御により記憶する保持型メモリ7、インタフェース回路8を有する。数値制御装置10が通常の稼動状態では、スイッチ手段2はオフに制御され、バッテリ3からシステムLSI1への電力の供給はなされない。数値制御装置10が稼動状態にある時、システムLSI1へは数値制御装置10から直接電力を供給するように構成されている。
(もっと読む)
加工装置
【課題】加工時にトラフルが発生した場合にトラブルの原因を検証することができる加工装置を提供する。
【解決手段】被加工物保持手段と、被加工物に加工を施す加工手段と、加工前の被加工物を供給する加工前被加工物供給手段と、加工後の被加工物を後処理する後処理手段と、前記各手段の作動を制御する制御手段と、制御手段に加工情報を入力する入力手段と、入力された加工情報等を表示する表示手段とを具備する加工装置であって、前記各手段の稼動状況を検出し検出信号を制御手段に送る稼動状況検出手段を具備し、制御手段は入力手段によって入力された加工情報を記憶する加工情報記憶領域と稼動状況検出手段から送られる稼動状況を記憶する稼動状況記憶領域を備えた記憶手段と、加工情報記憶領域に記憶された加工情報および稼動状況記憶領域に記憶された稼動状況を再生して表示手段に表示せしめる再生手段を具備する。
(もっと読む)
精密加工のための最適加工条件の決定を支援する装置
【課題】技術者が精密加工のための最適加工条件を決定しようとする作業において、当該作業を効果的に支援できる装置を提供すること。
【解決手段】本発明は、精密加工のための最適加工条件の決定を支援する装置であって、ワークの加工条件とNCデータとを記憶する加工用データ記憶部と、加工されたワークに関する測定データを記憶する測定データ記憶部と、対応する加工条件及びNCデータと測定データとに基づく一まとまりのデータ群を一つのノードとして、各ノード間の派生関係を記憶する派生関係記憶部と、前記派生関係に基づいて、各ノードの情報をツリー図として表示する表示部と、を備えたことを特徴とする装置である。
(もっと読む)
数値制御装置及び数値制御装置用移動量補正制御プログラム
【課題】加工プログラムで加工したワークを測定し、移動量を補正する場合多数のプログラムブロックの各々について制御コマンドの移動量毎に補正した値に修正するため、多大の労力と時間がかかり、汎用性に欠ける。
【解決手段】機械座標系における各軸方向のピッチ誤差補正量を装置出荷前に予め設定して記憶させたテーブルT1,T3,T5と、機械座標系の第1原点と異なる第2原点を有するワーク座標系における各軸方向のピッチ誤差補正量をユーザーが設定して記憶させたテーブルと、機械座標系における任意位置x,y,zまでの各軸方向の移動量補正値を、テーブルT1,T3,T5のピッチ誤差補正量から夫々演算した第1移動量補正値と、それに対応するテーブルのピッチ誤差補正量から夫々演算した第2移動量補正値との合計値として演算する。
(もっと読む)
複合機械加工の方法および装置
コンピュータで使用可能な方法および装置(102)は、ユーザインターフェース(150)のメニューを介した機械加工パターン(410)の選択あるいは指示と工作機械の軸の向き(430)の選択あるいは指示とによって、機械加工パターンと工作機械の軸の向きの様々な組み合わせを取り扱うことによって機械語命令(121)を生成するための迅速な構成を可能にする。
(もっと読む)
CADシステム及びCAM加工情報の生成方法
【課題】 CAM加工情報を生成する三次元CADシステム及び三次元CADを利用したCAM加工情報の生成方法において、二次元CADを合理的に利用する手法を提供すること。
【解決手段】処理装置は三次元CAD画像を生成しモニタに表示可能であり、この三次元CAD画像からCAMによる加工情報を生成する。処理装置は、二次元輪郭抽出部、区画分割部、最高点抽出部及び二次元加工範囲抽出部を備え、二次元輪郭抽出部は製品における加工対象部側視で加工対象部の二次元輪郭を投影させて抽出する。二次元加工範囲抽出部は、各区画A〜Nと区画高さZ0〜Z4により定まる二次元加工範囲を抽出し、CAMによる加工情報を生成する。
(もっと読む)
工作機械のパラメータ設定装置およびパラメータ使用数値制御工作機械設備
【課題】 不用意なパラメータの変更による予想外の機械動作の発生が回避でき、安全性の向上、付加価値の流出防止が図れるようにする。
【解決手段】 実制御用パラメータ記憶手段11に対応する入出力用パラメータ記憶手段12を設ける。実制御用パラメータ記憶手段11に対して入出力用パラメータ記憶手段12から、設定規則Rに従い、パラメータの変換処理を行って入力を行うパラメータ変換手段13を設ける。実制御用パラメータ記憶手段11の設定内容は、外部に非表示とし、そのパラメータの入力は、入出力用パラメータ記憶手段12を介して行う。前記設定規則Rは、個々の機械毎に特有の機械番号等を用いる。
(もっと読む)
自動塗布システム、および自動塗布システムの制御方法
【課題】高精度かつ高品位な接触塗布を行える自動塗布システムおよび自動塗布システムの制御方法を提供する。
【解決手段】被塗布物と接触して該被塗布物に塗布液を塗布するディスペンサーチップ180を有するサーボガン100をロボットアーム200で操作して、被塗布物にディスペンサーチップ180を接触させた状態で移動させ、サーボガン100に接触塗布を行わせ、ロボットアーム200にサーボガン100とともに装着され、サーボガン100が被塗布物上に形成した塗布液の塗布パターンをCCDカメラ800で撮影し、画像処理903で撮影画像データを解析して得た塗布液の塗布パターン形成状態に関する情報に基づき、サーボガン100の塗布動作、またはロボットアーム200の動作をフィードバック制御する。
(もっと読む)
材料取り合わせシステム
【課題】ファーストフィット法で割り付けをしたときに、最後のほうにしわ寄せがくるのを改善して、材料取り合わせの最適化を図る。
【解決手段】材料を一つずつ選択して、割り付け可能な製品を組み合わせて最適な割り付けを見つけ、仮割り付けとする。この処理に特殊な再起型アルゴリズムを採用する。材料を替えて同じ処理を繰り返す。複数の仮割り付け結果を比較して、歩留まりの良いものを製品の割り付けデータに採用する。これを繰り返しながら、あと2回で終了するタイミングを検出する。あと2回分は、複数の割り付けパターン候補を取得して比較し、使用材料長の総和が最小の割り付けパターンを採用する。
(もっと読む)
溶接シュミレーションプログラム、溶接シュミレーション装置、および溶接シュミレーション方法
【課題】溶接作業のシュミレーションが迅速かつ容易に行い得るプログラム、装置、および方法を提供することにある。
【解決手段】本発明のプログラム41は、溶接打点eの少なくとも2次元座標を含むデータ5が入力される第1ステップと、データ5またはデータ5および各溶接打点eの溶接面fを用いて、溶接打点eおよび溶接軸Jを作成する第2ステップと、仮想的に溶接ガンGが、溶接軸Jに合わせて、溶接打点eに配置される第3ステップと、少なくとも、溶接グループ名が変更される処理、または、溶接ガンGが変更される処理、または、溶接打点eのうちの何れかが削除される処理、または、溶接ガンGのアプロ−チ角が変更される処理、または、溶接ガンGの上下正反転の配置が変更される処理のうちの少なくとも何れかが行われる第4ステップと、第1〜第4ステップの情報が格納される第5ステップとを有す。
(もっと読む)
アラーム原因表示機能を有する数値制御装置
【課題】アラームに関連する情報を削減しメモリを節約したアラーム原因表示機能を有する数値制御装置を提供すること。
【解決手段】モータ4を駆動するためにアンプ3にドライブ指令7を出力する数値制御装置10やその周辺装置2,3,4の動作状態を診断する機能を有する数値制御装置10において、前記動作状態の異常を示すアラームメッセージと前記異常の原因を特定する情報をアラビア数字、または、アルファベット、または、アラビア数字とアルファベットとの組み合わせからなる追加情報として記憶する記憶装置5と、数値制御装置10やその周辺装置2,3,4に異常が発生した場合、該異常に対応したアラームメッセージおよび追加情報をメモリ5Aから選択してメッセージを作成し、作成されたメッセージを表示装置2に表示することを要求するようにした、アラーム原因表示機能を有する数値制御装置。
(もっと読む)
201 - 220 / 335
[ Back to top ]