
Fターム[3C269QC02]の内容
Fターム[3C269QC02]に分類される特許
61 - 79 / 79
数値制御装置及び数値制御システム

【課題】 二重化の信頼性を高めることができる数値制御装置及び数値制御システムを得る。
【解決手段】 CPUを内蔵するPLC101とバスで結合されるとともに、PLC101に入力される信号と同一の信号が入力され、且つPLCで実行されるPLC用プログラム109と実質的に同一の数値制御装置用プログラム110が、PLC用プログラム109の実行と並行して実行される数値制御装置において、PLC用プログラム109、数値制御装置用プログラム110及び各プログラムの動作を規定するパラメータを記憶する記憶手段106と、この記憶手段106に記憶されたPLC用プログラム109及びパラメータをPLC101に転送するとともに、この転送されたPLC用プログラム109及びパラメータを呼出し、且つこの呼出されたPLC用プログラムと数値制御装置に予め存在するPLC用プログラム109とを照合するとともに、呼出された制御装置側パラメータと数値制御装置側パラメータとを照合する手段とを備える。
(もっと読む)
ロボット教示システム及びロボット教示方法

【課題】ロボットをジョグ送り動作によって移動させる際、接触検知用センサなどを別途設けることなく、作業効率を向上させることが可能なロボット教示システム及びロボット教示方法を提供する。
【解決手段】ロボット教示システムにおいて、教示操作端末300は、ロボット100を現在位置から教示すべき目標位置へジョグ送りで移動させるジョグ送り手段を備え、ロボットコントローラ200又は教示操作端末300のいずれか一方又は双方には、目標位置の仮座標を記憶する記憶手段と、現在位置から目標位置へのジョグ送りによるロボット100の移動範囲を、仮座標と現在位置の座標の差分により定義する範囲に制限する制限手段と、を備える。
(もっと読む)
多軸制御システム
【課題】余分な配線を増やすことなく、モータを動かさずに、上位コントローラが指定したモータ駆動装置とモータの組合せの接続を確認できる、多軸制御システムを提供する。
【解決手段】通信ネットワーク4を介して上位コントローラ1により複数軸のモータ3をモータ駆動装置2で制御する多軸制御システムにおいて、モータ駆動装置2に報知手段21およびモータ3に報知手段31を備え、モータ駆動装置2を指定する通信コマンドを上位コントローラ1側で作成送信したとき、その通信コマンドで指定されたモータ駆動装置2の報知手段21および指定されたモータ駆動装置2に接続されたモータ3の報知手段31が報知動作をする。
(もっと読む)
ロボット制御装置
【課題】一方のロボットの作業線に対して教示点の追加、位置修正等の編集操作を行う場合、他方のロボットを移動させなくても対応する位置に自動的に教示点を追加または位置修正する。
【解決手段】複数のロボット毎に教示された同数の教示点で形成される複数の作業線を1の作業プログラムに記憶するロボット制御装置において、いずれか1の作業線WR1に対する編集操作として教示点の追加または位置修正が行われたときに、編集操作された教示点P111及び直前の教示点P110の離間距離aと、編集操作された教示点P111及び直後の教示点P120の離間距離bと、の比率を算出し、この比率に基づき、残りの作業線WR2に対して編集操作された教示点P111に対応した教示点P220を追加または位置修正する。例えばアーク溶接ロボットにおいては、両ロボット間の溶接速度の変動を抑えることができる。
(もっと読む)
作りつけの表示ランプを有する手動式および押ボタン式両用の手動パルス発生器
本発明は作り付けの表示ランプを有する手動式および押ボタン式の両用の手動パルス発生器を提供する。この手動パルス発生器は回転パルス入力ユニットと中央処理ユニットとを備えている。中央処理ユニットは正転表示ランプと逆転表示ランプに接続されている。回転信号入力ユニットおよび/または押ボタン信号入力ユニットは出力信号を中央処理ユニットに転送し、ここで処理される。その後、差分チップを介して制御信号が出力される。一方、中央処理ユニットはフィードバック回路を通して制御信号を収集することにより、工作機械起動時のセルフチェックを行う。このパルス発生器は非接触構造を採用することにより、従来技術より使用寿命が大幅に延長し、長持ちする。さらに、手動パルス発生器に制御器、作りつけの表示ランプ、および押ボタン制御ユニットを取り付けることにより、従来の手動パルス発生器の欠点を克服し、故障発生率を低減し、作業効率を大幅に向上する。加えて、構成が簡単なため生産が容易であり、また工作機械制御の分野で広く普及することに適する。  (もっと読む)
(もっと読む)
工作機械の制御装置
【課題】移動体と構造体の位置関係などをオペレータが容易に把握することができる工作機械の制御装置を提供する。
【解決手段】工作機械の制御装置1は、画面表示処理部19と、構造体のモデルにその外形形状を外側にオフセットして得られる1以上の干渉危険領域を設定した後、移動体移動後のモデルデータを生成して、移動体が干渉危険領域内に侵入するか否かを確認し、侵入を確認すると、その侵入位置及びどの干渉危険領域内に侵入するのかを示す信号を画面表示処理部19に送信する移動状態認識処理部18とを備える。画面表示処理部19は、移動状態認識処理部18によって生成されたモデルデータを基に、これに応じた画像データを生成して画面表示装置43に画面表示させるとともに、侵入位置が画面表示装置43の中央部に、侵入する干渉危険領域に応じた表示倍率で表示されるように画像データを生成して拡大表示させる。
(もっと読む)
工作機械の制御装置
【課題】オペレータがより安心して作業することができる工作機械の制御装置を提供する。
【解決手段】工作機械の制御装置1は、移動体の動作指令を基に送り機構部の作動を制御して移動体の移動位置を制御する駆動制御部13と、移動体及び構造体のモデルデータを記憶するモデルデータ記憶部15と、移動体の移動位置などを基に、移動体を移動位置に移動させた状態のモデルデータを生成し、生成したモデルデータに応じた画像データを生成して画面表示装置47に画面表示させる画面表示処理部20とを備える。画面表示処理部20は、移動体を画面表示する際の基準となる位置であって、移動体の、構造体と干渉する恐れのある部分に設定された表示基準位置と、画面表示装置47の画面表示領域の中心位置とが一致するように画像データを生成して画面表示させる。
(もっと読む)
駆動軸制御システムおよびその非常時の動作方法
【課題】 駆動軸制御機器の動作状況によって非常時の対処内容を変更できる駆動軸制御システムおよびそのおける非常時の動作方法を提供する。
【解決手段】 駆動軸制御機器4と、駆動軸制御機器4の動作を監視する制御監視用パネル1と、通信媒体3とを備えた駆動軸制御システムにおいて、駆動軸制御機器4に非常時に動作する非常時動作プログラムを複数格納する非常時動作プログラム格納部7と、非常時動作プログラムを選択する選択情報を格納する非常時動作選択情報格納部6と非常時動作選択情報格納部6の内容を設定する非常時プログラム選択部9を備え、制御監視用パネル1から非常時用の信号を駆動軸制御機器4に送ると、非常時動作選択情報格納部6の内容に従って、非常時動作プログラムを実行する。
(もっと読む)
製造システムおよび製造物
【課題】対象物に印加されるフィールド[f] に応じて生成されるポテンシャル[x] を有する対象物の製造システムを提供する。
【解決手段】演算処理可能な対象物の数学モデル(801)は対象物外形状より分割した複数の有限要素(802)に関連するフィールド[f] 及びポテンシャル[x] の各数値を特定して生成する。各有限要素(802)の素材の各物性値(804)の対称性が特定され、関係式[f]=[k][x]及び対称性に基づいて素材の物性マトリックス[k] を算出する。素材の物性値(804)の係数を、素材の物性マトリックス[k] から有限要素毎に抽出し、抽出された素材物性値(804)の係数と既知の素材物性値の係数とを一致するように比較する。製造設備を制御するための各製造パラメータ(805)を一致した素材物性値(804)の各係数に基づいて決定し、上記決定された各製造パラメータ(805)に応じて製造設備を制御して上記対象物を製造する。
(もっと読む)
レーザ加工装置、レーザ加工条件設定装置、レーザ加工条件設定方法、レーザ加工条件設定プログラム、コンピュータで読み取り可能な記録媒体及び記録した機器
【課題】3次元加工データの設定に際して、加工パターンのイメージを容易に確認できるようにする。
【解決手段】所望の加工パターンに加工する加工条件として、加工対象面の3次元形状と加工パターンとを設定するための加工条件設定部と、加工条件設定部で設定された加工条件に従って、加工対象面のレーザ加工データを生成する加工データ生成部と、加工データ生成部で生成されたレーザ加工データのイメージを2次元的及び/又は3次元的に表示可能な加工イメージ表示部とを備え、加工イメージ表示部で作業領域内の加工対象面を2次元的に表示させる際、レーザ光の照射方向における平面図を表示可能に構成している。
(もっと読む)
工作機械の制御装置
【課題】作業者が移動体を簡単に且つ安心して手動操作することができる工作機械の制御装置を提供する。
【解決手段】工作機械の制御装置1は、手動操作時に外部から入力される動作信号を基に移動体の移動位置及び移動速度を制御する位置制御部12と、移動体及び構造体のモデルデータを記憶するモデルデータ記憶部13と、構造体のモデルにその外形形状を外側にオフセットして得られる1以上の速度制御領域を設定するとともに、設定した速度制御領域及び位置制御部12から受信した現在位置などを基に、移動体を現在位置に移動させた状態のモデルデータを生成して、移動体が速度制御領域内で移動するか否かを確認し、移動を確認すると、移動する速度制御領域について予め設定された制限速度を位置制御部12に送信する移動領域確認部17とを備える。位置制御部12は、動作信号に応じた移動速度が制限速度を超える場合には、移動体を制限速度で移動させる。
(もっと読む)
ロボットシステム
【課題】
マニピュレータを軸操作キーを操作して動作させる時に、誤って操作してマニピュレータを周辺機器に干渉又は衝突することを避けることができるロボットシステムを提供する。
【解決手段】
教示装置の軸操作キーを2段階の操作ポジションを備えることにより、軸操作キーの1段階目にて、マニピュレータの動作軸に備えられた、表示器により、動作軸、動作方向、動作座標を可視化させ、軸操作キーの2段階目で実際にマニピュレータが動作する。また、イネーブルスイッチによりマニピュレータの動作禁止状態での軸操作キー操作で表示器により、動作軸、動作方向、動作座標を可視化させ、マニピュレータの動作する前に操作者が煩雑な操作がなく確認することが出来る。
(もっと読む)
コントローラ
【課題】コントローラとして、取出ロボットの手動操作に際して操作ミスを起こさせないよう表示画像を工夫して使い勝手をよくする。
【解決手段】コントローラ1は、表示画面10にロボット擬似画像7と共に十字キーを模した矢印画像8を表示する。画像処理部により、軸選択ボタン6で選択されたアーム軸に対応するロボット擬似画像7のアーム軸画像72〜74部分、及び選択されたアーム軸72〜74の移動可能な方向に対応する矢印画像8のボタン画像81〜84部分をアクティブ表示させる。手動操作制御部により、アクティブ表示されたボタン画像81〜84に対応する軸移動ボタン5をオン操作すると、アクティブ表示されたアーム軸画像72〜74部分に対してアクティブ表示のボタン画像81〜84で示す方向と一致して実機の取出ロボットのアーム軸を移動させるよう取出ロボットに指令する。
(もっと読む)
工作機械、具体的には、レーザ工作機械の分散化制御のための方法
本発明は、工作機械(24)、詳細には、レーザ工作機械の分散化制御のための方法であって、この工作機械が、保護用ハウジング(22)によって囲まれ、機械加工領域(31)にアクセスするための少なくとも1つの監視される領域(27、28)を有する機械加工領域(31)を備え、工作機械(24)を始動するために少なくとも1つの制御盤(21)によって操作される制御部を備え、1つ又は複数の多機能キー(16)を用いて制御され、少なくとも1つの多機能キー(16)が、少なくとも1つのアクセス領域(27、28)と関連付けられ、それぞれの多機能キー(16)が押されると、工作機械(24)に対する運転シーケンスの連続作業ステップの繰返しシーケンスで次にある運転シーケンスの作業ステップが作動する方法に関する。 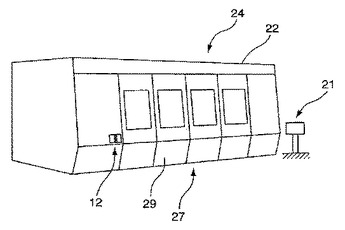 (もっと読む)
(もっと読む)
コンピュータ数値制御工作機械に適用する操作訓練シミュレーション装置
【課題】工作機械の切削加工作業が訓練できるコンピュータ数値制御工作機械に適用する操作訓練シミュレーション装置を提供する。
【解決手段】実体制御装置150、ソフトウェアシミュレータ160、伝送装置及びシミュレーション表示装置170を備える。実体制御装置150は、工作機械の動作コマンドを入力するための指令操作パネルを含む制御パネル110を有する。ソフトウェアシミュレータ160は、実体制御装置150に接続され、指令操作パネルで入力された動作コマンドを基に動作シミュレーションを生成する。伝送装置は、実体制御装置150及びソフトウェアシミュレータ160に接続される。シミュレーション表示装置170は、ソフトウェアシミュレータ160に接続され、ソフトウェアシミュレータ160により生成された動作シミュレーションを表示する。
(もっと読む)
設定状態表示機能付き工作機械
【課題】 制御や操作のための設定項目につき、設定状態の変更があった場合に、その変更状態の認知を作業者に促すことのできる設定状態表示機能付き工作機械を提供する。
【解決手段】 工作機械本体1と、この工作機械本体1を管理する管理手段2とを備える。管理手段2は、可変設定可能な設定手段11に設定された各種の設定項目の設定状態に従って工作機械本体1の制御および操作を行う制御・操作手段3、および作業者により操作されて前記設定手段11の設定状態を変更する変更操作手段14を有するものである。この管理手段2に、変更操作手段14による変更があれば、設定手段11の変更された設定状態を画面表示手段7の画面7aに表示させる表示出力手段6を設ける。表示出力手段6は、所定の基準設定状態を定めた基準設定状態記憶部16と、設定手段11の設定状態を基準設定状態記憶部16と比較して基準設定状態から逸脱する設定項目につき、変更された設定状態を表示させる比較部17とを有する。
(もっと読む)
工作機械の衝突防止方法
【課題】工作機械運転中の部材相互の衝突(干渉)を防止する方法に関し、特に、手動運転されている工作機械の工具や刃物台などの移動体と、その移動によりこれと干渉するおそれのある機械部分やワークなどの干渉体との衝突を、より確実に防止することが可能な技術手段を提供する。
【解決手段】移動体の移動動作を制御しているNC装置で当該移動体の現在の位置と指令された移動方向とを読取り、移動体の立体モデル表面の現在位置を指令された移動方向に延長した直線とコンピュータに登録された干渉体の立体モデル表面との交点を求め、当該交点の座標値をNC装置の進入禁止領域設定メモリに登録し、その後移動体の前記移動方向への移動を開始する
(もっと読む)
強化された手動制御によるCMMアーム
本発明は、外郭が設けられた強固CMMアーム用装置に関し、内部CMMアームと、内部CMMアームを、1つ以上の内部ボリュームが、固体対象物および流体の進入に対してシールされるように、複数の伝達手段を介して駆動する外郭を備える。本発明はまた、RCAの触覚制御にも関する。 (もっと読む)
工作機械または生産機械の少なくとも1つの機械軸線を移動させるための操作装置
本発明は、工作機械または生産機械の少なくとも1つの機械軸線を移動させるための操作装置であって、操作装置が、静止位置から変位可能な操作要素(2)を有し、変位(1)の量および持続時間に依存して機械の制御部(9)または調節部用の目標値(Xsoll)が発生可能であり、操作要素(2)の変位過程の間、そして操作要素(2)の変位が定常状態のとき、少なくとも1つの発生された目標値変更のため操作要素(2)を介してパルス状の機械的逆通知が操作者に逆通知可能となった操作装置に関する。それとともに本発明は、移動経路に関する機械的逆通知を操作者に与える操作装置を提供する。  (もっと読む)
(もっと読む)
61 - 79 / 79
[ Back to top ]