
Fターム[3C269QC02]の内容
Fターム[3C269QC02]に分類される特許
21 - 40 / 79
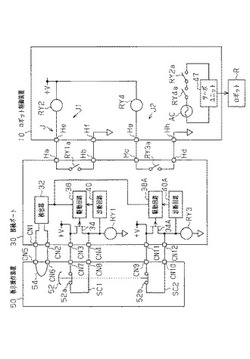
可動機械制御装置及び可動機械制御システム
【課題】
操作装置と可動機械制御装置とを非接続状態としても可動機械を稼働させる場合において、接続状態に戻す際に、非常停止機能の安全性を確認するために可動機械を停止する必要があった。
【解決手段】
半導体スイッチ34,34Aは、教示操作装置50が非接続状態において、オン作動すると、リレーRY1,RY3を励磁して非常停止スイッチ回路SC1,SC2が外されたことによるロボットRの停止を無効化する。診断回路40,40Aは、半導体スイッチ34,34Aがオン作動している期間に、メーク接点RY1a,RY3aがオフ作動しない範囲で半導体スイッチ34,34Aの診断を行う。教示操作装置50を接続状態に戻す際に可動機械を停止することなく非常停止機能の安全性を診断することができる。
(もっと読む)
工作機械の制御装置および運転制御方法

【課題】手動パルスモードと1ブロック停止モードとの両方を選択してNC装置を運転する場合に、NCプログラムの動作がブロック終了位置で自動停止した後における運転再開のための操作性を向上させる。
【解決手段】CNC部50のNCプログラムがブロック終了位置で停止した後、手動パルス発生器20のハンドル14の回転停止および当該回転停止後の回転開始をPLC部40において検出したときに、NCプログラムの次のブロックの実行を開始するように制御することにより、NCプログラムがブロック終了位置で自動的に停止した後も、ハンドル14を回転させるという1つの操作を行うだけで、NCプログラムの動作を再開させることができるようにする。
(もっと読む)
ロボットシミュレータ
【課題】ロボットとワークとの位置関係に変化が生じることを前提に、位置関係に変化が生じてもロボットの姿勢が動作可能な領域であるか否かを簡単な処理で判定する。
【解決手段】設置位置判定部67は、ワークに想定される誤差Δpに対応するエンドエフェクタの位置変化量Δrから、線形に近似された演算式を用いてマニピュレータの姿勢変化量Δqiを算出している。すなわち、設置位置判定部67は、演算部52にとって処理が容易な線形式を利用してロボットが作業可能な範囲であるか否かを判定する。
(もっと読む)
誤動作を防止する機能を備えた数値制御装置
【課題】工作機械において、座標系の変更による、加工不良、機械干渉を防止し、および加工不良、機械干渉の発生時の原因究明に要する時間を短縮することが可能な誤動作を防止する機能を備えた数値制御装置を提供すること。
【解決手段】機械の基準となる第一の座標系と所定の位置関係に設定された第二の座標系でプログラムする機械を制御する数値制御装置10において、前記第一の座標系と第二の座標系の位置関係を確立した後に座標系が変更されたか否かを監視する座標系変更監視手段16と、座標系変更監視手段16によって座標系の変更が行われたと判断された場合に、前記機械の運転の停止(アラーム発生手段19)あるいは警告表示(ワーニング表示手段20)の少なくともいずれか一つの処理を実行する手段と、を有することを特徴とする誤動作防止機能を備えた数値制御装置。
(もっと読む)
工作機械の制御装置
【課題】象限突起補正等に関するNCパラメータの調整を容易に行うことができる工作機械の制御装置を提供する。
【解決手段】複数のNCパラメータの調整レベルをそれぞれスライド式又はロータリ式の調整手段3で変えることができる入力部と、NCパラメータを変更することによって変化する機械の状態を図形で表した図形データを記憶するとともに、入力部で入力したNCパラメータの調整レベルに対応した図形データを生成する図形データ生成部7と、生成された図形データに基づいて図形を画面に表示する表示部4と、を具備する。
(もっと読む)
工作機械
【課題】制御対象物を省電力で駆動可能な工作機械を提供する。
【解決手段】工作機械1は、主軸80が目標回転速度に達するまでの時間と、主軸頭50が目標位置に達するまでの時間とを算出する時間算出部150と、目標回転速度に達するまでの時間と目標位置に達するまでの時間とを比較する比較部160と、主軸80の駆動と主軸頭50の駆動とを制御する駆動制御部110とを備え、駆動制御部110は、目標回転速度に達するまでの時間が目標位置に達するまでの時間よりも長いと判断された場合、主軸頭50が目標位置に達するまでの時間が、算出された目標位置に達する時間より長く、かつ算出された目標回転速度に達するまでの時間以下の時間となるように、主軸頭50の駆動を制御する。
(もっと読む)
産業機器、および工作機械
【課題】手動パルス発生器を用いて回転体の回転方向および回転速度を容易に設定、動作可能な工作機械を提供する。
【解決手段】工作機械1の制御装置800は、手動パルス発生器の回転ハンドルの回転によって生じたパルス信号に基づき、回転ハンドルの回転量、回転速度、および回転方向を判断する第1判断部850と、手動パルス発生器を有する操作器の軸選択信号発生部が発生した信号に基づき、軸選択スイッチによる軸の選択によって位置制御および回転速度制御のうちのいずれが選択されたかを判断する第2判断部860とを含む。制御装置800は、位置制御が選択されたと判断した場合、回転ハンドルの回転量と回転方向とに基づき、主軸の移動量と移動方向とを制御する。また、制御装置800は、回転速度制御が選択されたと判断した場合、回転ハンドルの回転速度と回転方向とに基づき、テーブルの回転速度と回転方向とを制御する。
(もっと読む)
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
動作入力装置
【課題】 イネーブルスイッチを操作しながら、他の入力操作を行うことができる動作入力装置の提供
【解決手段】 ティーチング装置1は、把持部11及び操作部13を有している。使用者は、ティーチング装置1を使用する際に、把持部11を掌及び第二指〜第五指を用いて把持する。操作部13は、把持部11を使用者が把持したときの第二指側に、把持部11に続いて配置されている。把持部11は、イネーブルスイッチ111を有している。使用者は、第二指〜第五指を用いてイネーブルスイッチ111を操作する。入力部131は、操作部13において把持部11が配置されている側とは反対側に位置する面P13に配置されている。これにより、把持部11を掌及び第二指〜第五指で把持しながら、入力部131への第一指による操作が可能となる。なお、入力部131は、タッチパッド133、液晶ディスプレイ135及び表示制御部137により構成されている。
(もっと読む)
工作機械
【課題】 主軸の軸心と工具の刃先間の主軸半径方向の距離を精度良く計測することができて、加工精度の向上が図れる工作機械を提供する。
【解決手段】 第1基準位置P1に対する主軸半径方向の主軸軸心位置Oを計測する主軸側位置計測手段20と、第2基準位置P2に対する刃物台7の位置を計測する刃物側位置計測手段30とを設ける。主軸側位置計測手段20は、主軸半径方向に延びるスケール21および読取部22からなり、スケール基端および読取部22のいずれか一方を主軸台5等の主軸軸心Oの付近に設置し、他方を第1基準位置P1に設置する。刃物側位置計測手段30は、スケール31の基端および読取部32のいずれか一方を刃物台7等に設置し、他方を第2基準位置P2に設置する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】動作制御部と動作指示部の電源が遮断された場合においても正常にロボットの動作停止を行え、また、正常に動作制御部と動作指示部を正常に終了するロボット制御装置およびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御装置1は、動作制御部2と動作指示部3と電源部5を備え、ロボット4が接続されている。動作制御部2は通信部201とプログラム記憶部203とプログラム実行部204とロボット制御部205と電源遮断検出部206とシャットダウン実行部207を備え、動作指示部3は通信部301と電源遮断信号抽出部302とデータ読出・書込部303とデータ記憶部304とシャットダウン信号生成部305とシャットダウン実行部306と電源制御信号生成部307を備え、電源部5は電力変換部501とUPS502と電源制御部503とスイッチ504を備えている。
(もっと読む)
NC工作機械における全駆動モーターに対する電力の供給及び切断制御方法
【課題】NC工作機械制御において、非常時用に電力の供給を生産するスイッチの存在に着目し、当該スイッチを全作動工程の終了段階においても、有効に活用すること。
【解決手段】NC工作機械において、工作及び搬送に関与している全駆動モーターに対し、専ら電力の供給及び切断を行うスイッチを設けずに、全駆動モーターに対し非常時に際し電源からの電力の供給を切断し、非常時以外の段階では電源からの電力を供給している非常時用スイッチに対し、中央コントローラーがNC工作機械の全作動行程が終了した段階において、全駆動モーターに対する電力供給の切断指令を伝達することによることにより、前記課題を達成し得る電力の供給及び切断制御方法。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
加工装置
【課題】加工工具の折損を自動検出でき、加工後の加工工具に折損がない場合、従来のように操作者により起動ボタンを押下する必要をなくして作業効率を向上させる。
【解決手段】昇降する加工工具5を検出する工具検出スイッチ3をテーブル1上に設けると共に、この工具検出スイッチ3がオンすることでオン、オフ信号を出力するスイッチ回路を有する自動起動操作ボックス11を設け、1加工工具による加工終了後、テーブル1の移動により工具検出スイッチ3を検出位置に位置づけて加工工具5を下降させ、その際工具検出スイッチ3が押下されたか否かにより加工工具5が折損しているか否かを判断すると共に、加工工具5が折損していないことで工具検出スイッチ3が押下されることにより前記スイッチ回路からオン、オフ信号が出力された場合、前記起動スイッチ17のオン、オフが行われなくとも自動的に次の加工に移るように制御する。
(もっと読む)
ロボットシステム
【課題】異物に衝突したか否かにかかわらず、振動的な動作を伴うことなく且つ機構部品に損傷を与えることなくロボットを緊急停止させることができるロボットシステムを提供する。
【解決手段】緊急停止モードにおいて、位置制御部31は、上位制御部から与えられる位置指令pcにかかわらず出力する速度指令vcをゼロに固定し、通常の位置制御は行わない。速度制御部32は、モータMの回転速度v*をゼロに固定された速度指令vcに一致させるように電流指令演算値ic’を演算するとともに、その電流指令演算値ic’に対して所定のフィルタ制御を行って電流指令icの変化量を所定の制限値以下に制限する。
(もっと読む)
数値制御装置
【課題】時刻を記録したり作業内容を記録する必要がなく、機械の稼働状況、特に機械の送り軸そのものの稼働状況を各軸の総移動量を記憶することで、機械の送り駆動機構の劣化を予知するためのデータを得ることができる数値制御装置を提供する。
【解決手段】与えられた指令に基づいて分配処理により各軸の1サンプリング周期間毎の移動量を出力する分配部25と、分配部25からの各軸の1サンプリング周期間毎の移動量を積算して各軸の総移動量を得るデータ処理部30と、各軸の1サンプリング周期間毎の移動量を積算して各軸の制御周期間毎の目標位置を各軸サーボに与えて各軸のモータを駆動するサーボ処理部21と、データ処理部で得られる各軸の総移動量を記憶するメモリ22とを備える。
(もっと読む)
無線教示操作盤およびロボット制御システム
【課題】教示操作盤の非常停止機能が有効か無効かを容易に認識可能とする。
【解決手段】可搬式の教示操作盤20とロボット制御装置との間で無線通信手段を介して通信することにより、教示操作盤20からの指令に応じてロボットを制御する。教示操作盤20は、教示操作盤本体30と、教示操作盤対して着脱可能に設けられロボットへの非常停止指令が入力される非常停止入力部31と、から構成される。非常停止入力部31が取り外された状態では、非常停止回路35が常開になり、この状態では、非常停止入力部31の操作による非常停止機能を無効化し、常に非常停止信号を出力する。これにより作業者は教示操作盤20が有する非常停止機能が有効か無効かを非常停止入力部31の着脱に応じて容易に判断することができる。また着脱検出部26により非常停止入力部31の取り付けを検出し、非常停止入力部31が取り外しされたときのみ無線通信を遮断可能とする。
(もっと読む)
機械制御装置
【課題】
単一の故障で機械の非常停止動作の安全機能が損なわれることのないように多重化されたハードウエア回路と最小限の通信回路を有しながら信頼性を確保した通信プロトコルによって信頼性の高い非常停止通信を行うことができる機械制御装置を提供する。
【解決手段】
一対のCPU12,13中の1つのCPUが非常停止スイッチ11の複数接点に関する全モニタ結果を含む通信パケットを生成し、単一の送信回路は送信する。ロボット制御装置の一対のCPU22,23は送信された通信パケットの通信エラー検出データを解析し、モニタ結果及び通信エラー検出データの解析結果に応じて第1、第2電磁接触器制御回路にOFFの制御信号を出力し、モータM41の電力を遮断する。
(もっと読む)
工作機械に対してワークの供給及び取り出しを行うロボットを制御するロボット制御装置
【課題】ロボットと工作機械を組み合わせて使用する加工システムにおいて、工作機械に関連する作業のためにロボットの動作を停止させる必要性を低減させ、作業効率を向上させる。
【解決手段】ロボット制御装置18は、ロボット制御装置18の操作を行うための持ち運び可能な教示操作盤46を備え、ネットワークケーブル42によって工作機械制御装置20,22と接続されている。教示操作盤46は、様々な情報を表示するための表示器を有し、工作機械制御装置20,22からネットワークケーブル42を介して取得した工作機械14,16に関する情報を教示操作盤46の表示器の工作機械用画面上に表示するように構成されている。
(もっと読む)
姿勢可変型直接教示モジュール
【課題】一つの直接教示モジュールと複数の産業用ロボットとで直接教示システムを構築し、一つの直接教示モジュールで各産業用ロボットごとに教示可能とする。
【解決手段】複数の産業用ロボットには、各産業用ロボットのアーム先端部分に取り付け部2を設け、取り付け部2に固定されたアーチ状で矩形断面のレール1と、アーチ状のレール1に沿ってレール1上をスライドしてロール角を調整するスライダ4と、スライダ4の外円周上をスライドしてピッチ角を調整するスライダ3と、所望の姿勢角になったときスライダ3及びスライダ4の位置を拘束する固定用操作レバー7と、スライダ3に設けられ、教示ハンドル部の連結用板6の被係合部に着脱自在に係合する爪式ロック機構8とからなる姿勢調整機構部を設け、前記一つの直接教示モジュールには、力センサ10及び姿勢角センサ9を有する教示ハンドル部と教示情報生成部とを備えた直接教示システム。
(もっと読む)
21 - 40 / 79
[ Back to top ]