
Fターム[3C269SA09]の内容
数値制御 (19,287) | 教示方法、教示手段 (478) | 制御対象を直接動かして教示するもの (162) | 制御対象が自動的に動くもの (18)
Fターム[3C269SA09]に分類される特許
1 - 18 / 18
ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ
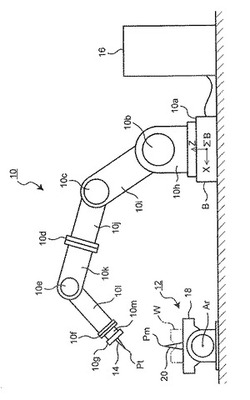
【課題】ポジショナ回転軸のロボットに対する相対的な位置姿勢を高精度に計測する。
【解決手段】
ロボット10に作業されるワークWを把持するポジショナ12の回転軸Arまたは直動軸の該ロボット10に対する相対的な位置姿勢を計測するロボット10の外部軸の計測方法であって、ポジショナ12の回転軸Arまたは直動軸に対する所定の位置に定義された計測点Pmにロボット10の基準点Ptが手動によって位置合わせされた状態の該ロボット10の姿勢を、基準点Ptが計測点Pmに位置合わせされた状態を維持しつつ計測姿勢に変更する。計測姿勢として、(1)関節10a〜10fそれぞれにおける、ポジショナ12が把持するワークWに対して作業を実行するときの作業姿勢時の関節値と計測姿勢時の関節値との間の差分値と、(2)関節10a〜10fそれぞれに対して予め定義されている重み値とに基づいて、作業姿勢に対する類似の程度が高い姿勢を決定する。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置

【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
ロボットの作業プログラム作成方法、ロボットの作業プログラム作成装置、及びロボット制御システム
【課題】位置及び姿勢の教示を厳密に行わなければならず、教示作業に非常に労力を要する。
【解決手段】教示モードでは、ラフ教示点であるセンシング点においてセンシング命令が入力される(S22)。この命令とセンシング点を記憶する(S23)。狙い角・前進後退角が入力される(S24)。センシングモードでは、センシング点にロボットを移動させ(S32)、レーザセンサを検出動作させてワーク形状を取得し(S33)、位置及び姿勢を算出して作業プログラムを作成する(S35)。ワークに位置ずれが発生しない環境下において教示作業を大幅に簡略化できる。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、溶接ワーク、スポット溶接ガン及び多関節ロボットの剛性に依存することなく、溶接ワークの対向電極側表面位置を正確に検出する。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガンの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、可動電極を溶接ワーク表面に接するように位置決めした後、サーボモータで可動電極を対向電極に接近させる方向に移動させると同時に、多関節ロボットを用いて対向電極と溶接ワークとを接近させる方向に同じ速度で相対移動させながら、可動電極の移動速度及び加速度の少なくとも一方を監視することにより、対向電極と溶接ワークとの接触を検出し、このときの対向電極の位置から溶接ワークの対向電極側表面位置を検出する。
(もっと読む)
ロボット教示システム
【課題】ロボットの通過位置が加工位置であるか退避位置であるかを簡単に設定することができ、ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、通過位置データ26、加工位置データ27、および退避位置データ28を入力するための入力部22と、ロボット11の通過位置を設定する通過位置設定部24とを有している。通過位置編集部30は、ロボット11の通過位置が加工位置であるかまたは退避位置であるかを設定する。プログラム作成部31は、移動プログラム32を作成し、出力部33により移動プログラム32がロボットコントローラ12へ送信される。
(もっと読む)
ロボットシステム
【課題】操作性に富んだ複数のロボットにたいする教示装置を提供すること。
【解決手段】ポータブル・プログラミング・ターミナル20は、上記制御ユニット14とデータ接続されている。手動ガイド・デバイス30は、ロボット1の可動構造部2およびエンド・エフェクタ13の少なくとも一方に対して、自身を連結する連結手段を備える。手動ガイド・デバイス30は、ポータブル・プログラミング・ターミナル20とのワイヤレス通信チャンネルをセットアップするワイヤレス通信手段を有し、当該ワイヤレス通信手段は、手動ガイド・デバイス30上の第1トランシーバー・モジュールと、ポータブル・プログラミング・ターミナル20上の第2トランシーバー・モジュールと、を備える。
(もっと読む)
ロボット装置の教示方法及びロボット装置の教示用治具
【課題】ロボット装置の構成の複雑化や大型化を招来することがなく、また、教示動作のための専用のキャリブレーションツールが不要であって、教示動作のたびに微小な位置及び傾きのずれが生ずることがなく、かつ、迅速な教示動作を可能とするロボット装置の教示方法及びロボット装置の教示用治具を提供する。
【解決手段】把持部材9をマニピュレータ1によって把持して平面部11を基準平面10に倣わせて基準平面10の位置を検出し、円筒部12を基準円筒体6に嵌合させて基準円筒体6の位置及び傾きを検出し、把持部材9を回転止め部材7により阻止されるまで軸回りに回転させて基準円筒体6回りの回転角を検出し、これらに基づいて、基準平面10、基準円筒体6及び回転止め部材7との相対位置及び傾きが既知である対象ワークの位置及び傾きとマニピュレータ1との相対位置及び傾きを求める。
(もっと読む)
作業座標系の設定方法及び作業座標系の異常検出方法
【課題】本発明は、ハンドと対象ワークとの相対的位置精度が高く、再現性に優れる作業座標系の設定方法及び作業座標系の異常検出方法を提供する。
【解決手段】ロボット1と対象ワークの相対的な位置関係を規定する作業座標系の設定方法において、ロボット1のハンド4が対象ワークに接触したことを検出するために力センサ6を用いることと、力センサ6からの検出値が予め設定された閾値を超えたときにハンド4が対象ワーク9に接触したと判断することと、接触位置を記憶することと、接触位置から作業座標系Cを算出すること、を備える。
(もっと読む)
シミュレーション装置
【課題】実在機器と仮想機器とを混在させた状態でそれらの動作をシミュレーションする場合に、実在機器及び仮想機器の動作を制御するための接続関係の記述が容易であると共に、実在機器と仮想機器との動作を切換えた場合であっても確実に同期を図ることができるシミュレーション装置を提供する。
【解決手段】シミュレータ1のシミュレーション管理部2は、動作ツリーを構成するタスクの接続関係に基づいて、自己に予め記憶している実行用プログラムにより実機5を直接制御すると共に仮想表示空間で仮想機6を制御するように構成されている。これにより、実機5と仮想機6との動作の同期を確実に図ることができると共に、実機5と仮想機6との動作を切換えた場合であっても同期化を維持することができる。
(もっと読む)
ロボットへのティーチング装置とティーチング方法
【課題】 カメラの配置位置に起因する誤差を抑制し、ロボットに動作姿勢を精度よく教示することができる技術を提供する。
【解決手段】 第1部品の組付部に対応する位置に設けられたカメラ10を有するパレット4に、第2部品の組付部を模した模擬部品8が設けられているマスタ部品が6固定された状態でカメラ10が撮影した第1画像から第2部品の目標位置を計算し、マスタ部品6が固定されていない状態のパレット4が第1部品の配置位置に配置されるとともに第2部品がロボット16によって保持された状態でカメラ10が撮影した第2画像から第2部品の実際位置を計算し、第2部品の目標位置と実際位置との間の偏差が所定の値よりも小さくなるときの姿勢を、第1部品に第2部品を組み付つける組み付け姿勢として、ロボット16に教示する。
(もっと読む)
自動教示システム
【課題】簡易な構成により搬送ロボットに対して搬送対象ポイントまでのハンドの移動経路を自動的に教示することが可能な自動教示システムを提供する。
【解決手段】 自動教示システムは、第1の光学センサ72、第2の光学センサ74、記録手段および算出手段を実現するCPU50を備える。第1の光学センサ72および第2の光学センサ74は、搬送対象ポイントに対する相対位置が予め定められるように配置される。第1の光学センサ72は、ハンド20の水平方向の一端部を検出可能に構成される。第2の光学センサ74は、ハンド20の水平方向の他端部を検出可能に構成される。CPU50は、第1の光学センサ72および第2の光学センサ74によってハンド20の端部が検出された時におけるロボット座標系における座標値を記録するとともに、その座標値に基づいてロボット座標系における搬送対象ポイントの座標値を算出する。
(もっと読む)
位置教示方法、位置教示プログラムおよび位置教示装置
【課題】 本発明は、装置の基板ホルダに円板状の基板を装着するロボットに対する位置教示に関し、より詳細には基板ホルダが確実に保持できる位置に基板を供給する位置教示方法、位置教示プログラムおよび位置教示装置に関する。
【解決手段】 本発明の位置教示方法は、複数の基板ホルダを備える装置において、基板を支持する爪で支持する基板ホルダに基板を装着するロボットに対する位置教示方法であり、ロボットに基板をキーボードへの供給位置まで搬送させ、基板の中心位置を第1の位置情報として取得する第1位置取得手順と、供給位置から基板ホルダに装着した後の基板の中心位置を第2の位置情報として取得する第2位置取得手順と、第1第2の位置情報との差分である偏差を求める偏差算出手順と、複数の偏差の中から所定の算出方法で偏差を代表する代表偏差を求める代表偏差算出手順と、代表偏差を基に教示位置を求め、ロボットに教示する教示手順とで構成する。
(もっと読む)
溶接教示位置補正システム
【課題】高性能なカメラを用いなくても、精度良く溶接チップの傾きを検出することができ、オフライン教示プログラムを補正すること。
【解決手段】溶接教示位置補正システム1は、ロボット2と、スポット溶接ガン3と、撮像装置4と、動作制御手段5と、画像処理手段6と、プログラム補正手段5と、を備える。溶接教示位置補正システムは、ワークWの打点部に取り付けられ、当該ワーク打点部からの高さが異なる二つの被撮像部が撮像装置により撮像されるターゲット10を備え、画像処理手段は、撮像装置により撮像した撮像画像における二つの被撮像部の位置からワークに対する溶接チップの傾き情報を取得し、プログラム補正手段は、画像処理手段により取得したワークに対する溶接チップの傾き情報に基づいて、教示プログラムにおける前記ロボットの教示位置を補正する。
(もっと読む)
ロボットの作業動作最適化装置
【課題】少ない作業試行数で迅速に最良の作業指令を自動的に決定することのできるロボットの作業動作最適化装置を得る。
【解決手段】作業結果評価部3は、ロボット部1の動作結果を観測し、動作結果が適切なものであるかを評価する。改良作業指令候補発生部4は、ロボット部1の動作が最も好ましいものになると推定される作業指令の候補を発生させると共に、作業指令の候補を発生させたことによるロボット部1の動作状態に対する作業結果評価部3の評価結果に基づいて新たな作業指令を発生させ、これを繰り返すことで最適化された作業指令を求める。
(もっと読む)
ロボットの教示装置
【課題】効率的に短時間で教示を行い、教示作業の負担を軽減することが可能となるロボットの教示装置を提供する。
【解決手段】ツール姿勢をツール姿勢入力手段1025で入力し、ジョグ移動させる際にロボット先端の位置または基本軸のみの軸操作で、姿勢を同時に変更させるツール姿勢自動変更手段1026を設け、冗長自由度がある場合は障害物位置入力手段1027から入力された位置情報を基に、ジョグ移動させる際にロボットが障害物に干渉しないように冗長自由度の姿勢をも変更させる冗長姿勢自動変更手段1028を設ける。
(もっと読む)
ロボット制御システムおよびロボットハンド
【課題】ティーチング作業を簡略化でき、ティーチング時間を短縮できるとともに、チョコ停の発生を防止できるロボット制御システムを提供する。
【解決手段】ロボット制御システム1において、ロボットアーム30、40と、ロボットアーム30、40の先端に設けられ、ワーク把持用のチャック部およびワーク撮影用の小型カメラを有するロボットハンド31、41とを備えたロボット3、4と、小型カメラで撮影された画像が表示されるタッチパネルを有し、ロボット3、4に対してティーチング入力を行うためのティーチングペンダントと、ティーチングペンダントでティーチング入力された所定の座標位置を、小型カメラで撮影されてタッチパネルに表示された画像に基づいて補正して、補正された座標位置に移動するようにロボット3、4を駆動制御するコントローラA、Bとを設ける。
(もっと読む)
棚位置自動ティーチング装置
【課題】新たな位置検出手段を必要とすることなく、創薬用自動保管庫に装備された移載用ハンドを用いて自動で全保管棚の位置情報を一つ一つ算出し、その結果を記憶する棚位置自動ティーチング装置を提供する。
【解決手段】ワーク搬送用に具備された移載用ハンドをX軸方向、Y軸方向及びZ軸方向に移動させて前記保管棚125の左右壁、奥壁及び上下壁に当接させることによって、各保管棚のX軸方向、Y軸方向及びZ軸方向についての位置情報を算出し、その結果を記憶させる。
(もっと読む)
1 - 18 / 18
[ Back to top ]