
Fターム[3D034CD03]の内容
操向リンク系及び4WS (6,986) | 4WSの検出(入力信号) (1,597) | 車両の運動状況 (761)
Fターム[3D034CD03]の下位に属するFターム
Fターム[3D034CD03]に分類される特許
1 - 20 / 38
車両の走行制御装置
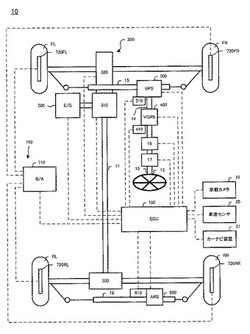
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
車両運動制御システム

【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
車両の後輪操舵制御装置
【課題】 旋回走行時の加減速に起因する旋回特性の変化を適切に抑制することができる車両の後輪操舵制御装置を提供する。
【解決手段】 自動車100の後輪3rl,3rrを転舵する後輪操舵アクチュエータ8l,8rを備えた車両の後輪操舵制御装置5であって、少なくとも前輪舵角δf(目標前輪舵角δft)、車速Vおよび前後加速度Gxを含む車両の運動状態量を検出する運動状態量検出手段(操舵角センサ12,車速センサ21,前後加速度センサ22)と、少なくとも前輪舵角δfおよび車速Vから、車両モデルに基づいて目標旋回挙動を設定し、当該目標旋回挙動に基づいて目標後輪舵角δrを設定する目標後輪舵角設定部32とを有し、前記車両モデルは、車両のスタビリティファクタAに基づいて設定され、スタビリティファクタAは、車速Vおよび前後加速度Gxに基づいて補正されることを特徴とする。
(もっと読む)
車両用転舵制御装置および車両用転舵制御方法
【課題】μスプリット路面での制動時、車両重心回りのヨーモーメントが増加することなく、ドライバの修正操舵量を減少することのできる車両用制御装置および車両用制御方法を提供する。
【解決手段】目標後輪転舵角演算部72が目標後輪転舵角を演算する。目標後輪転舵角補正部74は、μスプリット路判断部73が、路面がμスプリット路であると判断した場合、目標後輪転舵角を小さく補正した目標後輪転舵角補正値を演算する。この目標後輪転舵角補正値に基づいて後輪転舵角を補助操舵する。これにより、車両重心回りに発生するヨーモーメントを減少する。よって、μスプリット路の制動時における、ドライバによる修正操舵が容易になる。
(もっと読む)
後輪舵角制御装置
【課題】後輪舵角の限度を路面の凹凸の状態に基づいて決定し、後輪舵角を目標値通りに制御できる機会を多くすること。
【解決手段】車輪が路面の凹凸によりバウンドしたりリバウンドしたりすると、車輪が転舵可能な角度の上限値(限度)も変化する。一般的には、車輪がバウンドする(車高が小さくなる)と、車輪が車体に接近し、隙間が小さくなるため限度も小さくなる。そこで、後輪12が通過する路面の凹凸の状態が、前輪10の上下方向の挙動に基づいて予測され、その予測された路面の凹凸の状態に基づいて限度が決定される。そして、後輪12がその路面を通過する場合に、後輪12の転舵角度が、決定された限度を超えない大きさに制御される。
(もっと読む)
車両舵取り装置
【課題】タイミングベルトにて連動する複数の操舵軸を独立して回転させることにより、本体を移動させずにその位置で自由な方向に回転させることができる車両舵取り装置を提供する。
【解決手段】車両12の本体14に回動自在に保持された三個以上の操舵軸16と、各操舵軸16にそれぞれ設けられた駆動輪22と、各駆動輪22を独立して回転駆動するためにそれぞれ設けられた駆動源(駆動モータ30)と、各操舵軸16を連動して回動させるための連動装置(タイミングベルト34)と、この連動装置(タイミングベルト34)による各操舵軸16の連動を解除するための連動解除手段(解除クラッチ36)と、少なくとも一つの操舵軸16を本体14に固定するための固定手段(固定クラッチ38)とを備える。
(もっと読む)
車両のステアリング装置
【課題】仮想キングピン軸を可変としつつ従来よりも舵角を大きく確保することが可能な車両のステアリング装置を提供する。
【解決手段】一端部が車輪取付部3に対して一対の車輪側連結点Wf、Wrにて回転自在に連結され、他端部が一対の車体側連結点Bf、Brにて回転自在に連結される前アーム7L、7R及び後アーム8L、8Rをそれぞれ有する左右のアーム機構5L、5Rを有するステアリング装置1において、アーム機構5L、5Rの前アーム7L、7R及び後アーム8L、8Rのそれぞれは、複数のリンク10L、11L;10R、11R;12L、13L;12R、13Rを中間連結点Mf、Mrにて互いに回転自在に連結した構成とする。アーム駆動装置20により、連結点Bf、Br、Mf、Mr、Wf、Wrの回りの各リンクの角度が一義的に定まるようにアーム機構5L、5Rを互いに独立して駆動する。
(もっと読む)
車輌の走行制御装置
【課題】操舵輪転舵装置の作動速度が制限されることによる運転者の操舵操作に対する車両の旋回応答性の低下を操舵輪の旋回横力に依存しない旋回補助ヨーモーメントにて補填し、操舵輪転舵装置の作動速度が制限される際の車両の旋回応答性の低下を抑制する。
【解決手段】運転者の操舵に依存せずに操舵輪を転舵可能な操舵輪転舵装置24と、操舵輪の旋回横力に依存せずに旋回補助ヨーモーメントを発生可能な旋回補助ヨーモーメント発生手段としての制動装置52とを有する。所定の制御量制限条件が成立し操舵輪転舵装置の制御量が制限されているときには、各車輪の制動力を変更して左右輪の制動力差によるヨーモーメントを発生させることにより、操舵輪転舵装置の制御量の制限が車両に必要な旋回ヨーモーメントに与える影響を低減する。
(もっと読む)
自動車の後輪の少なくとも1つの方向転換アクチュエータに適用される方向転換設定点を管理するための方法と装置
本発明は、4つの操舵車輪を有する自動車の後輪の少なくとも1つの方向転換アクチュエータに適用される方向転換設定点(17)を管理するための方法に関する。前記方向転換設定点(17)は、路面に対するタイヤの保持力が非対称である状態で制動するときに、方向転換制御ユニット(14)によって生成される。本方法は、路面に対する4つの車輪のタイヤの保持力が非対称である状態で制動することによって生成されるヨートルクを相殺するために、後輪の中間方向転換設定点(2)を計算するステップと、この中間方向転換設定点(2)を、前記後輪の少なくとも1つの方向転換アクチュエータに伝送するステップとを有し、受け入れモジュール(3)を使用して前記中間方向転換設定点の値を監視するステップと、中間方向転換設定点(2)の受け入れモジュール(3)によって生成された情報(5、6)を制動制御ユニット(4)に伝送するステップとを有することを特徴とする。 (もっと読む)
車両の後輪操舵装置
【課題】システムの複雑化を防止した上で、運転者に違和感を与えることなく常に適切な後輪操舵制御を実現でき、もって旋回時の車両挙動を最適化できる車両の後輪操舵装置を提供する。
【解決手段】前輪横力センサ9fにより検出された前輪横力及び車輪速センサ8により検出された車速に基づき、前輪横力に対する後輪横力の応答遅れを模擬した2次伝達関数を含む車両の運動方程式に従って目標後輪横力を算出し、この目標後輪横力を達成するように、後輪1rの操舵アクチュエータ7を駆動制御して後輪操舵を実行する。
(もっと読む)
車両の運動制御装置
【課題】左右転舵時の走行性の走行感度向上と安定性向上を図る上で、より制御精度の高い車両の運動制御装置を提供する。
【解決手段】前輪横滑り角速度演算部55で前輪横滑り角速度βf’を、目標後輪横滑り角速度演算部56で目標後輪横滑り角速度βrd’を算出する。βf’とβrd’と車両状態量とから前後輪に掛かる目標横力を算出し、車両状態量とから前後輪に掛かる実横力を算出する。前輪目標横力と実前輪横力との偏差にもとづいて、前輪転舵角のフィードバック制御が行なわれる。後輪目標横力と実後輪横力との偏差にもとづいて、後輪トー角のフィードバック制御が行なわれる。目標ヨーモーメント演算部64cで目標ヨーモーメントが算出され、実ヨーモーメント演算部64dで実ヨーモーメントが算出され、目標ヨーモーメントと実ヨーモーメントとの偏差モーメントΔMZにもとづいてDYC制御部65は、駆動力配分量を決定する。
(もっと読む)
操舵制御装置
【課題】運転者による操舵を補助するにあたり、運転者に与える違和感を低減すること。
【解決手段】操舵制御装置20は、目標軌跡設定部21と、操舵特性設定部22とを含んでいる。目標軌跡設定部21は、車両の進行方向に存在する回避対象物に関する情報と、車両の運転者の顔向き又は視線の少なくとも一方とに基づいて、車両の目標とする進行軌跡を設定する。操舵特性設定部22は、目標軌跡設定部21が設定した車両の目標とする進行軌跡に基づいて、車両の操舵特性を設定する。
(もっと読む)
車両用視界確保装置
【課題】車両の旋回時にて、死角領域がドライバーに与える影響を低減することにより、ドライバーの視界を確保できる車両用視界確保装置を提供すること。
【解決手段】この車両用視界確保装置1は、車体を駆動してシャシーに対する車体角度ΔXを制御する車体角度制御手段2と、ドライバーの視線角度φを検出する視線角度検出手段3とを有する。この車両用視界確保装置1では、車両の旋回時にて、ドライバーの視線角度φが車両の旋回方向に発生する所定の死角領域から外れるように、車体角度制御手段2が車体角度ΔXを変化させる死角抑制制御を行う。
(もっと読む)
操舵装置
【課題】車輪のトー方向の変位を安定させて、車両の挙動を安定させることができる操舵装置を提供すること。
【解決手段】本発明による操舵装置は、車輪を回転自在に支持するナックル2と車体側とを伸縮自在に連結する伸縮手段11、12と、伸縮手段11、12を駆動する駆動手段13を備える操舵装置7であって、駆動手段13の駆動反力を支持する支持手段8を備えることを特徴とする。
(もっと読む)
車両用制御装置
【課題】車輪の制動力又は駆動力の向上を図ることができる車両用制御装置を提供すること。
【解決手段】車輪2のキャンバー角を初期位置P0から時計回りに第1の角度θ1だけ変化させる第1のキャンバー角調整動作を実行し、その後で、車輪2のキャンバー角を反時計回りに第2の角度θ2だけ変化させる第2のキャンバー角調整動作を実行する。これにより、路面と車輪2の接地面との間の接地状態が改善され、車輪2の制動力又は駆動力の向上が図られる。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備える。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動の発生を精度良く検出し適切にロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置1は、車両の横力を、スリップ角及び接地荷重の少なくとも一方を変数とした非線形の関数として演算し、その演算した横力と、少なくとも車両のロール角、ヨー角、上下変位と、に基づいて車両におけるロール振動の発生の有無を判断すると共に、その判断の結果ロール振動が発生すると判断された場合、ロール振動を抑制する。
(もっと読む)
被操舵後輪に対する旋回指令をモニタリングする装置及び方法
少なくとも三つの被操舵輪を有する車両(1)の被操舵後輪(5)への旋回指令をモニタリングする装置及び方法(29)であって、被操舵後輪(5)の舵角データ値がテンプレートと比較され、前記比較が、データ値を生成するコンピュータによって行なわれる。  (もっと読む)
(もっと読む)
車両の運動制御装置及び自動車
【課題】
運動性能を向上させ、高機能の運動制御性を有する自動車又はその運動制御システムを提供する。
【解決手段】
旋回運動を行うための操舵手段と駆動輪を駆動するエンジンの出力を変化させるアクセル手段と車輪の制動力を変化させるブレーキ手段との各手段のうち少なくとも一つの手段を操作するためのアクチュエータと、アクチュエータを制御するコントローラと、車両に生じる加速度及び加加速度を検出する運動状態検出手段と、を備え、コントローラは、運動状態検出手段からの車両の加速度及び加々速度を受けて、車両の加速度と反対の向きに車両の運動を制御する制御力又はトルクを発生させかつ車両の加々速度と同じ向きに車両の運動を制御する制御力又はトルクを発生させるようにフィードバックをかけてアクチュエータを制御する。
(もっと読む)
1 - 20 / 38
[ Back to top ]