
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
1,481 - 1,500 / 1,660
運転支援装置
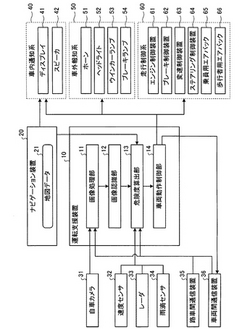
【課題】歩行者との事故発生の危険度を総合的に判定し、危険度に適応した回避行動を支援すること。
【解決手段】自車カメラ31によって撮影した車両周辺の画像や、路車間通信装置35、車両間通信装置36が受信した画像に対して画像処理部11による画像処理を施した後、画像認識部12が歩行者の有無を認識する。その結果、歩行者が存在するならば危険度算出部13がナビゲーション装置20、速度センサ32、レーダ33、雨滴センサ34などの出力を用いて歩行者と自車両とが接触する可能性(危険度)を算出し、車両動作制御部14はエンジン制御装置61、ブレーキ制御装置62、変速制御装置63、ステアリング制御装置64、乗員用エアバッグ65および歩行者用エアバッグ66を制御して危険度に対応した車両動作の支援を実行する。
(もっと読む)
パワートレインの制御装置

【課題】 最適な出力トルクを選択する出力トルク制御装置を提供する。
【解決手段】 動力源の出力トルクに対する要求を、車両の挙動もしくは走行状態に基づいて出力する複数のトルク要求手段(VSC、TRCおよび変速に伴う電磁スロットルの制御手段)を備えたパワートレインの制御装置において、前記複数のトルク要求手段から同時に出力トルク要求が出力された場合に、それらの出力トルク要求のうち要求されている出力トルクが最大もしくは最小の出力トルク要求を選択する出力トルク要求選択手段(ステップS9、ステップS21)と、その出力トルク要求選択手段によって選択された出力トルク要求によって前記動力源の出力トルクを制御する動力源制御手段(ステップS9、ステップS21)とを備えていることを特徴としている。
(もっと読む)
加減速度制御装置
【課題】 アクセルペダルの操作により加減速度を制御するシステムにおいて、アクセルペダルの良好な操作性を維持しつつ、急制動時等に必要な大きな減速度の発生を可能とすること。
【解決手段】 本発明による加減速度制御装置は、操作ストローク内に減速領域と加速領域を有し、非操作位置が前記減速領域に属するアクセルペダルと、操作ストローク内に減速領域を有するブレーキペダルと、前記減速領域に属するアクセルペダルの操作位置に基づく目標減速度と、前記減速領域に属するブレーキペダルの操作位置に応じた目標減速度とのうち、大きい方の目標減速度を最終目標減速度として決定する調停手段と、前記最終目標減速度に応じて動作する制動力発生装置と、を備えることを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】効率の良い回生及び燃費の向上並びに運転者が感じる違和感の緩和を実現することのできるハイブリッド車両の制御装置を提供する。
【解決手段】アクセルペダル開度及び車速を含む運転状態に基づいて、エンジンが駆動力を発生する必要がない場合であるか否かを判定する制御判定手段102と、自動変速機の複数の変速段の中から変速段を選択して、変速制御する変速制御手段104と、内燃機関が駆動力を発生する必要がないと判定された場合には、ロックアップクラッチの締結制御及びモータ回生制御を行うロックアップクラッチ締結・モータ回生制御手段106と、車両の減速度が規定値以上である登坂路走行中であるか否かを判定する登坂路走行判定手段108と、登坂路走行中であると判定された場合には、ロックアップクラッチの締結解除及びモータ回生禁止の制御をするロックアップクラッチ締結解除・モータ回生禁止制御手段110とを具備する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】燃料カットや効率の良い回生を行うハイブリッド車両制御装置提供。
【解決手段】ハイブリッド車制御装置で、アクセル開度又はスロットル開度を含む運動状態にて、内燃機関が駆動力を発生する必要ないか否かの制御判定手段と、スロットル開度と車速にて、自動変速機の変速段選択手段と、制御判定手段により内燃機関が駆動力を発生する必要がないと判定され、且つ変速段選択手段により選択された最終変速段が現在選択されている変速段よりも2段以上高速段であるか否かの2段アップシフト判定手段と、その手段により所定の条件を満足すると判定されたとき、現在から1段ずつ最終変速段まで順次変速制御するとともに、変速段制御に同期及び並行して、半締結状態に一定時間なるようにロックアップクラッチを制御した後に最終変速段の直前から最終変速段への変速に同期して直結状態になるようロックアップクラッチを制御する2段アップシフト制御手段。
(もっと読む)
運転者の制御依存度検出装置、及びそれを備えた車両の減速制御装置
【課題】運転者が車両の減速制御に対して過度に依存していることを検出することが可能な運転者の制御依存度検出装置を提供する。
【解決手段】車両と前記車両の前方の前車との位置関係を適正にするために前記車両の運転者の減速意思が検出されたときに行われる前記車両の減速制御に対して、前記運転者が過度に依存していることを検出する運転者の制御依存度検出装置であって、前記運転者の減速意思が検出された時点における前記前車と前記車両との衝突の可能性を推定する推定部131と、前記推定された衝突の可能性を示すデータを記憶する記憶部137と、前記記憶されたデータを参照して、前記推定された衝突の可能性が増大したときに、前記減速制御に対して前記運転者が過度に依存していることを検出する検出部131とを備えている。
(もっと読む)
車両の駆動力制御装置および車両
【課題】 運転者の加速期待を満足しつつ違和感が軽減した変速制御を行なう車両の駆動力制御装置およびそれを備える車両を提供する。
【解決手段】 駆動力の増加補正が行なわれた伸び感向上モードに突入する条件は、アクセルペダル操作が所定期間一定値以上踏み込みが行なわれており(S1)、かつ少なくともアクセルペダルを戻し気味にしていない(S2)場合である。この条件が満たされると、自動変速機に対してアップシフトを行なう判断をすること(S5)に同期してモード切換を行なう(S7)。変速判断時に同期させることにより、伸び感向上モードに変更になる時点を運転者が受入れやすい。また変速に同期して伸び感向上モードに切換えることにより、違和感もなくすことができる。さらに車の設計においては、駆動力可変制御に切換えるタイミングを設定しやすい。
(もっと読む)
加減速度制御装置
【課題】 車両のバック走行時に1ペダルモードを実現してバック走行時のペダル操作性を高める加減速度制御装置の提供を目的とする。
【解決手段】 アクセルペダルまたはブレーキペダルの操作により加速制御及び減速制御の双方を行う1ペダルモードと、アクセルペダルの操作により加速制御を行い、且つ、ブレーキペダルの操作により減速制御を行う通常モードとを有し、1ペダルモード及び通常モード間を切り換えるモード切換手段を備える加減速度制御装置において、前記モード切換手段は、車両のバック走行時のアクセルペダルまたはブレーキペダルの操作に対して前記1ペダルモードが実現されるように、前記切り換えを行う。
(もっと読む)
車両のエンジン自動停止装置
【課題】 エンジン自動停止条件の成立から実際のエンジン停止までの時間を不要に遅らせることなく、エンジンの自動停止によるショックを確実に低減できるようにして、燃費やエミッションの性能向上と快適な乗り心地の両立を図ることのできる車両のエンジン自動停止装置を提供する。
【解決手段】 エンジン自動停止装置は、エンジンの動力が自動変速機を介して車輪に伝達される車両に搭載され、自動変速機は、エンジンの自動停止時に油圧を解放することによって自動変速機内の入力側と出力側の動力伝達を遮断するクラッチを備えている。このような前提において、エンジン自動停止装置は、エンジン自動停止時に、前記クラッチの締結圧解放を開始してから実際にエンジンを自動停止するまでにディレイ時間を持たせ、そのディレイ時間を自動変速機内の油温に応じて変更する
(もっと読む)
ハイブリッド車両の制御装置
【課題】 減速走行時におけるモータジェネレータの協調駆動制御を伴うダウンシフトでの違和感の発生を防止する。
【解決手段】 エンジン2、モータジェネレータ4および自動変速機7を備えてハイブリッド車両1が構成され、自動変速機7の自動変速制御を行う油圧制御バルブ12およびコントロールユニット15と、モータジェネレータ4の駆動制御を行うパワードライブユニット11およびコントロールユニット12とを備える。アクセルを解放した状態で走行している間に自動変速制御が行われる場合に、実入力側回転数が変速後のギヤレシオに対応する入力側回転数に近づくようにモータジェネレータの協調駆動制御を行うが、車輪側に対するトータル制動トルクがエンジンフリクショントルクより大きくなるように協調駆動制御が行われる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータによるエンジンとメインシャフトの回転同期時のショックを低減するようにしたハイブリッド車両の制御装置を提供することである。
【解決手段】車両減速中でロックアップクラッチが締結されている場合、滑り判定ユニットでエンジンの回転数とメインシャフトの回転数との差回転又は回転比が減速側で一定値以上か否かを判定する。差回転又は回転比が一定値以上と判定された場合、同期ユニットがモータジェネレータを駆動してエンジンの回転数とメインシャフトの回転数を同期させる。同期させる際、制御圧補正ユニットによりロックアップクラッチのトルク容量がモータジェネレータによる回転同期トルク以下になるように制御圧を補正する。
(もっと読む)
車両の運転支援装置
【課題】たとえ、低速域での追従制御と中高速域での追従制御においても目標車間時間を連続して共通に用いることができドライバが自然な感覚で利用することを可能とする。
【解決手段】走行制御ユニット5における自動追従制御では、目標車間時間Ttを自車速V0に基づいて演算設定し、先行車との車間距離Lと先行車速Vfと自車速V0と目標車間時間Ttとに基づき目標加速度aを演算して、自動ブレーキ制御や自動加速制御等を行う。ここで、目標車間時間Ttの演算設定は、自車速V0の関数で演算され、この関数は、自車速Vが高くなるほど目標車間時間Ttが小さくなる傾向の関数に設定され、第1の設定値と第2の設定値とを予め定め、自車速V0を第2の設定値を指数として累乗し、該累乗した値に第1の設定値を乗算した項を少なくとも有する。
(もっと読む)
車両の駆動力制御装置
【課題】 先行車との車間距離に応じて変速比をダウンシフトする制御において、アクセルオフの状態では減速度が過大となり、車間距離が無用に大きくなり、または以後の加速応答が悪化する。
【解決手段】 先行車の加速状態または車間距離等を検出する車間距離センサを設け、自車が減速中かつ先行車が加速中であることを検出したときには、変速機の目標変速比をダウンシフト側に補正するのみならず、エンジンの目標出力をアイドルよりも増大側に補正する。これによりアクセルオフ時の減速度を抑制して車間距離の急拡大を回避すとともに、この状態からの加速応答を改善する。
(もっと読む)
車両のエンジンの始動装置
【課題】 車両走行中にエンジンを自動停止させた場合にエンジンを確実に再始動させることができるエンジンの始動装置を提供する。
【解決手段】 車両の走行中においてもエンジンを自動停止させるとともに、この自動停止状態にあるエンジンを再始動させるECU2が設けられている。ECUは、エンジンの自動停止条件が成立したときに自動変速機構をドライブ状態からニュートラル状態に切り換える。また、このECUは、エンジンの再始動条件が成立した場合であって車速センサの検出結果に基づいて車両が走行中であると判定した場合に、エンジンの再始動時におけるピストンの正転作動時から、エンジン停止時に吸気行程にある気筒のピストンが最初に迎える圧縮上死点を通過するまでの再始動不安定期間の所定時期に、自動変速機構をニュートラル状態からドライブ状態に切り換えるように制御する。
(もっと読む)
運転補助装置の取付装置
【課題】 グリップ付き操作アームにより操作されるブレーキ制御機構およびアクセル制御機構を収容してなる運転補助装置の本体を、車体に容易に取り付けることができるようにする。
【解決手段】 グリップ2付き操作アーム3により操作されるブレーキ制御機構およびアクセル制御機構を有する運転補助装置の本体1と一体化され、一端が運転席スライドレール固定用のクロスメンバの一端側に連結された水平配置の第1の板状リンク11と、一端がクロスメンバの他端側に連結され、他端が第1の板状リンク11の他端側に本体角度調整機構12を介して連結された第2の板状リンク13とを備えた。
(もっと読む)
車両の制御装置
【課題】 ダウンシフト時のショックを抑制する。
【解決手段】 ECT_ECUは、車両がコースト状態である場合(S100にてYES)、オルタネータ102による電気負荷を予め定められた変化率で増大するステップ(S102)と、ダウンシフトが行なわれた場合(S104にYES)、オルタネータ102による電気負荷を低減させるステップ(S106)とを含む、プログラムを実行する。
(もっと読む)
車両の駆動力制御装置
【課題】 凍結等により滑りやすくなっているコーナーでの走行時に、過誤のアクセル操作等により車両がスリップを起こす不具合を回避する。
【解決手段】 車両走行中に前方にコーナーが現れた場合にこれをカーナビゲーションシステム等の道路情報検出手段により検出し、アクセル開度に対する不感帯設定または遅れフィルタ処理を施し、急激なアクセル操作が直接的に車両の駆動力に反映しないようにする。これにより、コーナー走行中に誤って過大なアクセル操作をした場合のスリップ発生の可能性を低減する。
(もっと読む)
ハイブリッド車用駆動装置及びその制御方法
【課題】 急発進が要求されるストール発進時に、迅速に大きい駆動力を車輪に伝達して良好な加速を得ることが可能なハイブリッド車用駆動装置及びその制御方法を提供する。
【解決手段】 モータと、前記モータとエンジンとの間で駆動力の伝達又は切断を行う第一クラッチと、前記モータ及び前記エンジンの一方又は双方の駆動力の車輪側への伝達又は切断を行う第二クラッチと、前記モータ、前記第一クラッチ及び前記第二クラッチの動作制御を行う制御装置と、を備えたハイブリッド車用駆動装置であって、前記制御装置は、前記車輪が停止し且つ前記エンジンが停止している時に、ブレーキが効いている状態でアクセルが開かれた場合には、前記第二クラッチを開放して前記第一クラッチを係合し、前記モータを駆動して前記エンジンを始動させた後、前記第一クラッチを開放して前記第二クラッチを係合するストール発進待機制御を行う。
(もっと読む)
車両制御装置
【課題】 進行方向に存在する分岐路に対して自車両が進入する分岐路を推定する際に運転者の意志を適切に反映させると共に、分岐路上のカーブを適正に通過させる。
【解決手段】 作動部64は、分岐路比較部67での比較結果において推定分岐路と実分岐路とが一致せず、かつ、カーブ認識部61により推定分岐路または実分岐路にカーブが存在することが認識された場合には、今回の処理での自車両の走行状態と同等の走行状態に対する分岐路推定部66での次回以降の推定処理において、今回の処理での実分岐路を次回以降の推定分岐路として推定するように分岐路推定部66の処理内容を変更する。
(もっと読む)
車両の事故防止装置及び緊急通報装置
【課題】 運転者の誤操作による事故が発生しやすい場所で、運転者の誤操作を未然に防
止したり、誤操作をいち早く気付かせることにより、暴走や転落などの事故を防止するこ
とができる車両の事故防止装置を提供すること。
【解決手段】 車外の所定場所に設置されたマーカ1への車両Mの接近状態を検出する検
出手段と、検出手段により所定の接近状態が検出されたか否かを判断する判断手段と、判
断手段による判断結果に基づいて所定の報知を行う報知手段とを装備する。
(もっと読む)
1,481 - 1,500 / 1,660
[ Back to top ]