
Fターム[3D041AB01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040) | 一般車両 (1,682)
Fターム[3D041AB01]の下位に属するFターム
バス、トラック (22)
Fターム[3D041AB01]に分類される特許
1,441 - 1,460 / 1,660
車輌の統合制御装置

【課題】車輌の運転支援制御、駆動力制御、制動力制御の制御装置の間に於ける情報の授受を単純化し、情報の送受信量を低減して統合制御の信頼性を向上させる。
【解決手段】運転支援電子制御装置40により運転支援目標制駆動力Fxtdssが演算されると共に駆動力制御電子制御装置42の第一の調停器56へ送信され、調停器56により運転者要求目標制駆動力Fxddtと運転支援目標制駆動力Fxtdssとが調停されて車輌のトータル目標制駆動力Fxdttが演算され、制駆動力分配器60によりトータル目標制駆動力Fxdttが目標駆動力Fxptと目標制動力Fxbtとに分配され、第二の調停器62により目標駆動力Fxptに基づき最終目標駆動力Fxpttが演算され、制動力制御電子制御装置44の調停器66により運転者要求制動力Fxdbtと目標制動力Fxbtとが調停されて車輌のトータル目標制動力Fxbttが演算される。
(もっと読む)
衝突負荷低減車両システム

【課題】自車両への相手車両からの側面衝突が避けられないと判断した場合に相手車両から受ける横方向の衝撃を減少し、乗員へ与える衝突負荷を減らすこと。
【解決手段】自車両周囲に車両接近を検知した時に相手車両との距離、相手車両の進行方向と速度、自車両の速度を求め(11)、減速に要する距離が確保できず相手車両との側面衝突を避けられないと判断した場合は、自車両のブレーキ制御装置で制動を掛け(12)、さらに自車走行路をはみ出させないタイミングで、ステアリング制御装置で相手車両の進行方向と同一方向へ自車両の進行方向を変えるように操舵すること(13)。また、制動効果と操舵効果が発揮できるようにABS機構の作動を制御すること。また、ステアリング制御装置と操舵モータを設ける代わりに、ブレーキ制御装置で内輪と外輪の制動の掛け方を制御することで操舵すること。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御装置,動力出力装置の制御方法
【課題】遊星歯車機構の潤滑をより適正に行なう。
【解決手段】遊星歯車機構にエンジンとモータMG1と駆動軸とを接続し、駆動軸に変速機を介してモータMG2を接続した自動車において、変速機のブレーキB1,B2を作動する油圧回路100の異常によりブレーキB1,B2の作動に用いられた後のオイルを潤滑剤としてオイル用流路116を介して遊星歯車機構30に供給することができないときには、エンジンを継続して運転する。これにより、ブレーキB1,B2を作動するのに十分な圧送性能を有する機械式ポンプ102からのオイルとブレーキB1,B2を作動するのに必要最低限の圧送性能を有する電動ポンプ104からのオイルとのうちブレーキB1,B2の作動に用いられなかったオイルをオイル用流路116を介して遊星歯車機構30に供給することができ、遊星歯車機構30の潤滑を行なうことができる。
(もっと読む)
車両の制御装置
【課題】燃料供給を再開する際に実際にロックアップ解除状態になっていない状態でのトルクショックを防止する装置を提供する。
【解決手段】ロックアップ締結信号を受けたときにエンジン(1)と変速機(23)とを直結状態とし、ロックアップ解除信号を受けたときにエンジン(1)と変速機(23)とを非直結状態に戻すロックアップ機構(22)と、ロックアップ領域にあるときにロックアップ締結信号を出力し、ロックアップ領域にないときにロックアップ解除信号を出力する手段(32)とを備える車両の制御装置において、燃料供給カットの指示が出たときにエンジンへの燃料供給をカットする手段(6)と、前記燃料供給カットの指示の後に燃料供給再開の指令が出たときに目標空燃比を一時的にリッチ化する処理を行う手段(6)と、実際にロックアップ解除状態にあるか否かを判定する手段(6)と、この判定結果より実際にロックアップ解除状態にないときには前記一時的なリッチ化処理を禁止する手段(6)とを備える。
(もっと読む)
ロックアップクラッチ装備車両の回生制御装置
【課題】エンジン負荷トルクの急増によるエンジンストールを抑止しつつ回生制動エネルギーの回収効率の向上を図ったロックアップクラッチ装備車両の回生制御装置を提供すること。
【解決手段】ロックアップクラッチが完全連結状態で最大発電レベルで回生発電を行っている場合において、しきい値に相当する解除車速設定値としての完全L/U解除車速を車速が下回る場合(S110)に、ロックアップクラッチを完全解放状態とし(S112)、かつ、回生発電レベルを低下させる(S116)。
(もっと読む)
走行制御装置
【課題】 追従制御を解除することなく先行車との車間距離を詰めて停車する。
【解決手段】 先行車までの車間距離が目標車間距離となるように先行車に追従走行を行う走行制御装置において、停車するまで先行車に追従走行する第1追従制御モードと、自車速が0より大きい所定車速に低下するまで先行車に追従走行する第2追従制御モードとを備える。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御装置,動力出力装置の制御方法
【課題】 モータMG2に異常を生じたときに車両が急減速するのを回避する。
【解決手段】 変速機60のクラッチの異常によりモータMG2の回転数Nm2が大きくなってモータMG2に異常を生じるおそれがあるときには、変速機60のクラッチをオフとしてモータMG2の回転軸48と駆動輪39a,39bに連結されたリングギヤ軸32aとの接続を解除する。これにより、モータMG2に異常を生じたときに車両が急減速するのを回避することができる。もとより、モータMG2に異常を生じたときでもエンジン22からの動力をリングギヤ軸32aに出力することができる。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱回避に必要なヨーモーメントを確実に発生させる。
【解決手段】車線逸脱防止装置は、選択フラグFLSDが1の場合、左右の駆動輪の駆動力差により目標ヨーモーメントを車両に付与して逸脱回避をし(ステップS14〜ステップS16)、選択フラグFLSDが2の場合、左右の駆動輪の駆動力差及び予め選択した制動輪(ステップS8)に制動力を与えて、左右輪の制動力差により目標ヨーモーメントを車両に付与して逸脱回避をし(ステップS17〜ステップS19)、選択フラグFLSDが0の場合、左右輪の制動力差により目標ヨーモーメントを車両に付与して逸脱回避をする(ステップS20及びステップS21)。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御装置、動力出力装置の制御方法
【課題】 二次電池などの蓄電装置の入出力が制限されているときでもスムーズに変速機の変速を行なう。
【解決手段】 モータと駆動軸とに介在する変速機のギヤの状態をスムーズに切り替えるためにモータのトルク変更が要求され(S170)、このトルク変更がバッテリの入出力制限Win,Woutの範囲内で行なうことができないときには(S200)、もう一つのモータのトルク指令Tm1*をバッテリの入出力制限の範囲内となるよう再設定すると共に(S210,S250)、エンジンの回転数Neが目標回転数Ne*程度となるよう要求パワーPe*も変更する(S230,S270)。これにより、変速機のギヤの状態の切り替えをスムーズに行なうことができる。
(もっと読む)
車両制御システム
本発明は車両用の制御システム(1)に関し、この制御システムは、ステアリングシステム(6)と、ブレーキシステム(7)と、トランスミッションユニット(4)とを有する電子的制御ドライブトレイン(2)を備えている。操作装置(10)は運転操作要求(FW)から動きベクトル(BV)を生成し、制御装置(12)はその動きベクトル(BV)から、ドライブトレイン(2)を作動させることが可能な制御信号(SS)を生成する。操車、特に車両の後進を簡略化するため、車両(3)の所在及び位置に関し、状態・位置決定装置(14)によって得られる実際値と目的地入力装置(15)を用いて入力可能な設定値とから移動経路を計算する経路コンピュータ(13)が備えられる。この移動経路は、ドライブトレイン(2)が移動経路の動きベクトル(BV)を処理する際に車両を実際の状態及び実際の位置から設定状態及び設定位置へ移動させる一連の動きベクトル(BV)から構成される。このため経路コンピュータ(13)は、操作装置(10)に加え、動きベクトル(BV)を伝送するため、共通のドライブトレインインタフェース(11)を経由して制御装置(12)に接続されている。  (もっと読む)
(もっと読む)
車両用走行制御装置
【課題】 追従走行中の先行車が検出されなくなったときに、加速動作が不適切な場所で設定車速への加速動作が実行されて運転者に違和感を与えるのを防止する。
【解決手段】 自車両が走行する車線のレーンマーカーを検出して車線情報を検出し、追従走行中の先行車が検出されなくなったときに、自車線の車線情報に基づいて設定車速への加速動作の許可または抑制を判定し、その判定結果にしたがって追従走行中の先行車が検出されなくなった後の車速を制御する。
(もっと読む)
車両の挙動制御装置
【課題】目標とするヨーレート等を常に最適な領域内で設定して安定した制御が行え、且つ、ドライバに適切な操舵状態への転舵を促す。
【解決手段】制御装置40は、各道路情報、前方画像、各車輪速度、ハンドル角、実ヨーレート、横加速度が入力される。これら入力信号に基づき、車両の挙動がアンダステア状態か、オーバステア状態か判定し、車両1が発生させることの可能な限界ヨーレートで目標とするヨーレートを制限しながら車両挙動を安定させるべくブレーキ駆動部13に信号出力する。また、制御装置40は、現在のドライバによる操舵状態が限界を超えていないか否かを判定し、限界を超えている場合には、ドライバに適切な操舵状態への転舵を促すべくパワーステアリング制御装置30に対して電動モータ17によるアシストトルクを減少補正するように信号出力する。
(もっと読む)
希薄燃焼内燃機関の制御装置
【課題】 高地での排気性能の悪化を、出力を低下させることなく抑制でき、然も、排気性能の悪化の抑制するための制御を有効に実行させる。
【解決手段】 高地でディーゼルエンジンが高負荷域で運転されているときには、排気還流量を増加させることでNOxの増大を抑止し、かつ、出力一定で無段変速機における変速比を低速側に変更して、エンジンの回転速度を排気微粒子が発生しにくい高回転側にシフトさせる。
(もっと読む)
インターチェンジ合流支援装置
【課題】インターチェンジに合流する際のドライバーの負担を軽減すること、合流先のレーンを走行する車両との衝突を避けて安全に合流先のレーンに合流すること、合流先走行レーンを走行する後方車両をやり過ごして、その後方に生ずる空き領域にて合流する判定を行なうことができるインターチェンジ合流支援装置を提供する。
【解決手段】合流先走行レーンの後方車両距離Lrと後方車両速度Vrと前方車両距離Lfと前方車両速度Vfとを検出し、かかる検出結果より演算した目標速度Vtargetへ自車両21の車両速度Vaを制御し、さらに、合流先走行レーンに対する自車両21の位置Pxを演算し、自車両21の位置Pxをもとに演算した目標ハンドル操作角へ自車両21のハンドルの角度を制御する。
(もっと読む)
車両の駆動力制御装置
【課題】ドライバーの意図に則した運転性を達成する車両の駆動力制御装置を提供する。
【解決手段】アクセルペダル踏み込み量検出手段(2)と、ドライバーの加減速要求を判断する加減速判断手段(20)と、この加減速要求に基づいて車両の目標駆動力を演算する目標駆動力演算手段(40)とを備える車両の駆動力制御装置において、地域属性を検出する地域属性検出手段(1)と、この地域属性情報から自車走行中の道路種別を判断する道路種別判断手段(30)と、自車走行中の道路種別が高速道路であり、かつ、ドライバーの加速要求がある場合に、前記目標駆動力を増大するように補正する目標駆動力補正手段(40)とを備えたこの道路種別に基づいて、前記目標駆動力を補正する目標駆動力補正手段とを備える。
(もっと読む)
加減速度制御装置
【課題】 自動制御機能の作動中のアクセルペダルによる加速操作を容易化すること。
【解決手段】 アクセルペダルの操作ストローク内の浅い操作範囲に減速領域が形成され且つ深い操作範囲に加速領域が形成され、アクセルペダルの操作量に応じて決定される加減速度関連の目標値に基づいて加減速度を制御する1ペダルモードと、アクセルペダルの操作量又はブレーキペダルの操作量に応じて決定される同目標値に基づいて加減速度を制御する通常モードとを有し、自動制御機能の作動中は、所定車速又は先行車に対して所定車間距離となるようにアクセルペダルの操作量以外の因子によって目標値を算出すると共に、前記通常モード中に採用される決定態様に従ってアクセルペダルの操作量に応じた目標値を決定し、何れか一方の目標値に基づいて駆動力発生装置を制御して車両の加速度を制御する。
(もっと読む)
電気変速機を有する無段変速トランスミッションにおける、内燃エンジンのトルクの飽和を制御する方法および装置
本発明は、内燃エンジン(1)と少なくとも2つの電気機械(2、3)とを備え、電気変速機を有する無段変速トランスミッションの制御方法である。本制御方法は、内燃エンジン(1)の回転数の基準値(RWice)と車輪トルク基準値(RTo)とによって定義される、無段変速トランスミッションの瞬間的な動作ポイントを計算することに基づく。更に、内燃エンジン(1)のトルクが飽和する場合に、その飽和が解消されるように車輪トルク基準値(RTo)を補正する。 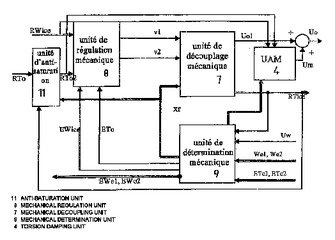 (もっと読む)
(もっと読む)
ハイブリッドカーのギアシフトトランスミッションのシフトチェンジ制御方法
【課題】 ハイブリッドカーのギアシフトトランスミッションのシフトチェンジ制御方法の提供。
【解決手段】 該内燃機関エンジンと該電動モータと発電機は相互に接続され並びにクラッチでトランスミッションに接続されて車両を駆動する。シフト過程で、電動モータの補助により内燃機関エンジンの回転速度が制御され、トランスミッションの入力軸回転速度との同期が達成され、クラッチが快速、スムーズに噛み合い、クラッチシートが磨耗減少しシフト時間が短縮する。このほか、シフト過程で電動モータと発電機の補助により内燃機関エンジンの出力軸の出力トルクを零となるよう制御してスロットルの瞬時変化が形成する汚染と燃料消耗の増加を減らす。
(もっと読む)
車両安定化制御装置
【課題】 車両の安定性向上と制動性能向上の両立を図る。
【解決手段】 車両の左右車輪に異なる制動圧を付与することにより車両にヨーモーメントを発生させる制動制御部20と、前記車輪の向きを変更するように付勢する操舵制御部10、とを備え、これら制御部10,20によって車両を安定化させる車両安定化制御装置1であって、前記左右車輪と路面との摩擦係数に差があるスプリットμ路か否かを判定するVSA制御部25を備え、前記VSA制御部25によりスプリットμ路と判定されているときの制動時には、車速に応じて寄与度の割合変更を実行して、車速が小さいほど制動制御部20の寄与度に対する操舵制御部10の寄与度の割合を大きくする。
(もっと読む)
加減速度制御装置
【課題】 アクセル操作量検出手段又はブレーキ操作量検出手段の異常発生時においても、良好な操作性での退避走行等に必要な加減速操作を可能とすること。
【解決手段】 アクセルペダルの操作量を検出するアクセル操作量検出手段と、ブレーキペダルの操作量を検出するブレーキ操作量検出手段とを備え、アクセルペダル又はブレーキペダルの操作量に応じて加速制御及び減速制御の双方を行うことができる加減速度制御装置において、アクセル操作量検出手段の異常を検出するアクセル異常検出手段と、ブレーキ操作量検出手段の異常を検出するブレーキ異常検出手段とを備え、前記異常検出手段によりアクセル操作量検出手段及びブレーキ操作量検出手段の一方に異常が検出された場合、異常が検出されていない他方の操作量検出手段により検出される操作量に基づいて目標加減速度を決定し、該目標加減速度が実現されるよう制動力発生装置等を制御する。
(もっと読む)
1,441 - 1,460 / 1,660
[ Back to top ]