
Fターム[3D041AC29]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | ブレーキ (1,220) | ブレーキペダル、レバー (35)
Fターム[3D041AC29]に分類される特許
1 - 20 / 35
車両用運転操作支援装置
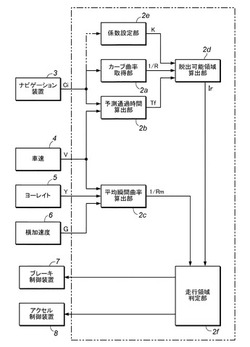
【課題】実車位置とナビゲーション装置上の自車位置とにずれが生じていた場合でもカーブを脱出する際の加速操作に対する違和感を運転者に与えることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からカーブ情報を取得し、カーブ情報からカーブを抜け出るための脱出可能領域を設定し、車速V・ヨーレイトY・横加速度Gから走行状態を取得し、カーブの長さと車速とから通過時間を求め、走行状態から平均瞬間曲率を求め、平均瞬間曲率を積分して自車が脱出可能領域にある場合には速度抑制制御を解除する。ナビゲーション装置のみでカーブ走行時の運転操作支援を行う場合のずれを防止することができ、運転操作支援としてカーブ走行自に減速制御する場合に、運転者がカーブ脱出のために加速操作しようとした場合に減速制御を続けてしまうという違和感を運転者に与えることを防止し得る。
(もっと読む)
車両の駆動力制御装置

【課題】何らかの原因によってアクセルペダルが戻らない事態に陥っても駆動力を十分に低減できる車両の駆動力制御装置を提供する。
【解決手段】アクセルペダル及びブレーキペダルの両方の踏み込みに基づいてフェールセーフ制御が必要であるか否かを判定するフェールセーフ判定部(110)と、アクセル操作量に基づいてエンジンを制御するための制御用アクセル操作量を設定し、フェールセーフ制御が必要であるときに制限された制御用アクセル操作量に基づいてエンジン出力を制限するエンジン制御部(130〜160)と、トランスミッションの変速比を設定する基本変速モードとその基本変速モードに比較して大きい変速比が選択される駆動力重視変速モードとを備え、フェールセーフ制御が必要であるときに駆動力重視変速モードを禁止して基本変速モードに制限して制御用アクセル操作量に基づいて変速制御するトランスミッション制御部(200)と、を備える。
(もっと読む)
車両の速度制御装置
【課題】簡素化された道路データベースを用いて、車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置の提供。
【解決手段】道路データベースにて、道路のカーブ内における屈曲度一定区間Cr#を定義するため、屈曲度一定区間Cr#の端点位置である第1位置Px#、及び、屈曲度一定区間Cr#の一定屈曲度Rm#が予め記憶されている。車両位置Pvhに基づいて、車両前方における車両が走行している道路上に存在する屈曲度一定区間Cr#のうちで車両に対して最も近い位置に存在する基準屈曲度一定区間が決定される。車両の実車速Vxa、基準屈曲度一定区間Cr#の第1位置Px#、及び、基準屈曲度一定区間Cr#の一定屈曲度Rm#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。
(もっと読む)
車両用追従走行制御装置
【課題】 車両用追従走行制御装置において、自車が先行車の発進に追従して自動的に発進する機能を備えていると運転者が誤認するのを防止する。
【解決手段】 停止した先行車Vbに追従して停止しようとした自車Vaの減速中に先行車Vbが発進した場合、自車Vaが先行車Vbに追従してそのまま加速すると、運転者は自車が自動発進機能を備えていると誤認する可能性がある。そこで先行車Vbの停止位置に仮想先行車Vb′を設定することで、実際の先行車Vbが発進した場合でも、停止中の仮想先行車Vb′に追従して自車Vaを一旦停止させる。その結果、運転者が発進スイッチを操作して発進意思を示すまで自車Vaは発進することがなくなり、自車が自動発進機能を備えていると運転者が誤認するのを防止することができる。
(もっと読む)
車両およびその制御方法並びに駆動装置
【課題】降坂路を含む走行環境に関する走行環境条件が成立していてアクセルオフ時に、運転者の意図をより反映する。
【解決手段】所定の走行環境であるときのアクセルオフ時にSポジションからDポジションへのシフト変更操作であるSDシフト変更操作が行なわれたときには(S120)、シフトポジションSPがDポジションで所定の走行環境でないときと同様の目標制動トルクTr*に対応する制動力が車両に作用するようエンジンと二つのモータとブレーキアクチュエータとを制御する(S230〜S310)。これにより、シフトポジションSP(S1〜S6)に応じた制動力を車両に作用させることを要求していない(不要としている)と考えられる運転者の意図をより反映することができる。
(もっと読む)
作業車の走行変速構造
【課題】 作業車において走行用の変速装置及びガバナ装置を操作する操作レバー及び操作ペダルを備えた場合、ガバナ装置及び走行用の変速装置を一緒に高速側及び低速側に操作できる利点を残しながら、操作ペダルによって適切な操作が行えるようにする。
【解決手段】 操作ペダル12の操作位置に対応するエンジン3の回転数が、操作レバー11の操作位置に対応するエンジン3の回転数よりも低速側であると、操作レバー11の操作位置に対応する位置にガバナ装置15が操作された状態で、操作ペダル12の操作位置に対応する変速位置に走行用の変速装置6が操作される。操作ペダル12の操作位置に対応するエンジン3の回転数が、操作レバー12の操作位置に対応するエンジン3の回転数よりも高速側であると、操作ペダル12の操作位置に対応する位置にガバナ装置15を操作し、且つ、操作ペダル12の操作位置に対応する変速位置に走行用の変速装置6が操作される。
(もっと読む)
車両の制御装置
【課題】運転状況に応じて適切に制駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】シフトレンジを切り換えることにより車両の制駆動力を制御する処理と、事故を回避する事故回避動作および事故の発生のうち少なくともいずれか一方の有無を判定する処理とを実行するSBW−ECU4と、車両を加速させる加速操作を検出する加速操作検出手段22とを備え、SBW−ECU4が、事故を回避する事故回避動作および事故の発生のうち少なくともいずれか一方の有無を判定し、かつ、加速操作検出手段22が加速操作を検出した場合に、SBW−ECU4が加速操作を誤操作であると判断して、シフトレンジをニュートラルレンジNおよびパーキングレンジPに切り換えることにより車両を減速させるよう制駆動力を制御するよう構成する。
(もっと読む)
運転走行支援装置
【課題】運転者に運転能力が低下していることを気付かせ、運転能力が低い状態での運転を減少させる運転走行支援装置を提供する。
【解決手段】運転走行支援装置10は、運転者の覚醒状態又は飲酒状態を検出する運転者状態検出部11と、前記運転者状態検出部11により検出された覚醒状態又は飲酒状態に基づいて、前記運転者の状態を判定する運転状態判定部12と、前記運転状態判定部12により判定された前記運転者の状態に基づいて、アクセル、ブレーキ、ステアリング、車間距離制御手段及び車線維持手段の少なくとも1つの制御特性を変更するように制御する車両制御部13と、を備えている。
(もっと読む)
車両制御装置
【課題】低速での定速走行制御時でも速度ハンチングを防止する。
【解決手段】車両制御装置は、車体速度が目標速度に維持されるように、車両(10)に対して付与する駆動力及び制動力を制御する車両制御装置であり、車両に備わる複数の車輪の車輪速度を夫々特定する特定手段(41FR等)と、特定される車輪速度に基づいて、各車輪に係る車輪速度有効速度を夫々演算する演算手段(51)とを備える。そして、これら各車輪について演算される車輪速度有効速度が所定速度閾値を下回るか否かに応じて、各車輪の車輪速度が夫々有効であるか否かを判定する判定手段(51)と、判定手段による判定結果に応じて、各車輪について演算される車輪速度有効速度のうち何れかの値を超える値に、目標速度を設定し直す設定手段(51)と、特定される車輪速度に基づいて当該車両の車体速度を推定する推定手段(51)とを備える。
(もっと読む)
車両の旋回挙動制御方法および装置
【課題】旋回挙動制御用左右輪間制駆動力差に起因した左右駆動輪の同方向転動変位によるヨーモーメントの影響を排除して目標ヨーモーメントを正確に達成可能にする。
【解決手段】旋回挙動制御用の左右輪間制駆動力差(制駆動力モーメント)により車両に直接付与されるヨーモーメント、および、左右輪間制駆動力差(制駆動力モーメント)に起因した左右輪の転動変位によるヨーモーメントとの合計ヨーモーメントと、左右輪間制駆動力差(制駆動力モーメント)との関係を求めておき、これを用いて横軸上の合計ヨーモーメントに目標ヨーモーメントMzを当てはめることにより、目標ヨーモーメントMzを実現するのに必要な目標制駆動力モーメント(左右輪間目標制駆動力差)を求め、これを基に左右輪の制駆動力指令値をそれぞれ求めて旋回挙動制御に資する。
(もっと読む)
追従走行制御装置
【課題】停止状態から安全に発進可能な追従走行制御装置を提供することを課題とする。
【解決手段】先行車両への追従走行を制御する追従走行制御装置1であって、運転者の顔向き又は視線方向を検出する運転者状態検出手段11と、手動操作によって停止状態から発進又は追従走行制御開始を指示する第1指示手段20,50と、アクセルペダル操作によって停止状態から発進又は追従走行制御開始を指示する第2指示手段15,50とを備え、車両停止制御中に運転者状態検出手段11によって検出した顔向き又は視線方向に基づいて脇見と判断した場合、第1指示手段20,50による作動を禁止するとともに第2指示手段15,50による作動を許可することを特徴とする。
(もっと読む)
経路曲率に応じた車両の速度制御装置
【課題】
ドライバの感覚に合致する車両の速度制御装置を提供すること。
【解決手段】
瞬時毎の曲率を演算する手段と、自車の速度を制御する手段を備え、瞬時毎の曲率が増加傾向にあるときは、速度を減少させ、瞬時毎の曲率が減少傾向にあるときは、速度を増加させるように制御する。
(もっと読む)
運搬車のスロットル操作装置
【課題】運搬車や、移動農作業機等にあっては、走行時にスロットルレバーを所定の位置で保持できる機構を有するスロットルレバーが用いられることが多い。このような形態において、エンジンを高速回転に設定しているとき、ブレーキ操作をしてもエンジントルクが強いためにブレーキが効き難いことがあり、咄嗟のときは危険である。
【解決手段】摩擦機構3を介して操作設定位置を維持可能のスロットルレバー2と、ブレーキ連動のブレーキレバー4を、スプリング5を介して連動構成して、ブレーキ操作を行うことによってこのスロットルレバー2の設定位置に拘らずエンジン回転を下げると共に、該ブレーキレバー4を制動解除することにより、スプリング5によりスロットルをスロットルレバー2による操作設定位置へ復帰することを特徴とする運搬車のスロットル操作装置。
(もっと読む)
車両用運転操作補助装置
【課題】運転者の操作を将来の走行環境に応じて適切にアシストできるような車両用運転操作補助装置を提供する。
【解決手段】レーザレーダ10,前方カメラ20,後側方カメラ21および車速センサ30によって、車両状態および車両周囲の走行環境を検出する。コントローラ20は、検出された車両状態、走行環境から、車両もしくは車両周囲の走行環境の将来を予測し、将来において必要な運転操作量、例えば操舵反力を推定する。操舵反力制御装置60は、必要な操舵反力となるようにサーボモータ61を制御し、運転者の操作を補助する。
(もっと読む)
自動車用ペダル装置
【課題】クリープ現象を停止し、しかもペダル装置位置調節機能を有したペダル装置を提供する。
【解決手段】支持棒12と揺動板14を使用してアクセルペダル3とブレーキペダル4をシーソー機構に備え、ブレーキ用バネ16によりブレーキペダル4が常時踏み込まれた状態に停止させた。次に床面、自動車前後に沿って配置されたレール50とペダル装置を支持する土台20をボルト47で噛み合わせ、モータ70で歯車60,歯車63,歯車66を介してボルト47を正回転又は逆回転させることによりペダル装置の前後調節を行う。
(もっと読む)
車両用運転操作補助装置
【課題】運転者による前後方向および左右方向の運転操作を適切にアシストすることができる車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置1は、自車両の周囲に存在する障害物を検出する障害物検出手段10,20,21,30と、障害物検出手段10,20,21,30による検出状況に基づいて、自車両に対する障害物の存在方向、相対距離および相対速度をそれぞれ検出する障害物認識手段50と、障害物認識手段50からの信号に基づいて、自車両の障害物に対するリスク度を算出するリスク度判定手段50と、リスク度判定手段50からの信号に基づいて、運転者による自車両の前後運動および左右運動に関わる運転操作を促すように、車両機器の作動を制御する車両機器操作量制御手段60,80,90と、車両機器操作量制御手段60,80,90における前後方向の制御量および左右方向の制御量の配分をそれぞれ調整する配分調整手段50とを有する。
(もっと読む)
車両の走行制御装置
【課題】 停止中の車両がドライバの意図することなく走行することを防止することができる車両の走行制御装置を提供する。
【解決手段】 車間制御ECU2は、車間制御部21および制御解除部22を備えている、車間制御部21は、先行車両との車間距離や車両の車速に基づいて、先行車両を追従する先行車両追従制御を行う。制御解除部22は、車両の走行中にドライバがブレーキ操作を行った場合に車間制御部21の制御を解除する。また、車両の停止中にドライバがブレーキ操作を行った場合に、車間制御部21による車間制御の制御解除を中止する。
(もっと読む)
車両制御装置、車両制御方法
【課題】より精度よくブレーキペダルの踏み外しを検出して車両を制御する車両制御装置、車両制御方法を提供すること。
【解決手段】車両のブレーキペダル11の誤操作を検出して車両を制御する車両制御装置において、ブレーキペダル11の踏み込み位置Qを検出するオフセット検出手段10と、ブレーキペダル11のストロークを検出するブレーキペダルストロークセンサ12と、ブレーキペダル11の踏み込み位置及びブレーキペダル11のストロークに基づき、ブレーキペダル11の誤操作を判定するコントロール部15と、ブレーキペダル11の誤操作と判定された場合に車両の制動力又はエンジンを制御する制御手段16、17と、を有することを特徴とする。
(もっと読む)
作業車両
【課題】走行系と制動系の二系統の解除手段をそれぞれ独立して形成でき、一方の解除手段に不具合が生じても、他方の解除手段によって前記車速維持機構を強制的に解除でき、車速維持機能及びその解除機能の信頼性等を向上できるようにした作業車両を提供するものである。
【解決手段】走行部を備えた走行機体に搭載されたエンジンと、油圧式無段変速機と、前記油圧式無段変速機からの変速出力を伝えるミッションケースと、変速ペダルと、車速維持機構と、前記走行部を制動するブレーキ操作手段とを備えてなる作業車両において、前記ブレーキ操作手段の制動操作によって前記車速維持機構が強制的に解除される制動系解除手段を備え、前記変速ペダルによって前記車速維持機構を解除する走行系解除操作と、前記制動系解除手段によって前記車速維持機構を解除する制動系解除操作とを、それぞれ独立して実行可能に構成しているものである。
(もっと読む)
運転装置の制御装置及び制御方法
【課題】誤作動に基づく運転性の悪化を防止する運転装置の制御装置及び制御方法を提供する。
【解決手段】運転装置の制御装置は、車両に走行指示を与えるレバーを有する運転装置を制御するための制御装置において、操作レバー12及び/又はハンドル60が握られているかどうかを検出する検出手段54と、検出手段の検出結果に基づき、操作レバー及び/又はハンドルを握られていないときは、操作レバー12による車両への走行制御を禁止する駆動制御手段52とを備えている。これにより、誤作動に基づく運転性の悪化を防止することができる。
(もっと読む)
1 - 20 / 35
[ Back to top ]