
Fターム[3D041AD03]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466) | 機関軸回転数、出力 (992) | 加減速度、変化割合 (37)
Fターム[3D041AD03]に分類される特許
1 - 20 / 37
変速制御装置
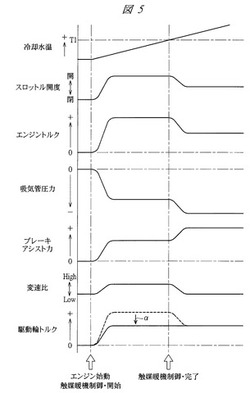
【課題】点火時期の遅角化によって触媒を暖機する際に、運転手に違和感を与えることなく、スロットルバルブを開側に制御する。
【解決手段】エンジン始動後の冷却水温が所定値T1を下回る場合に、点火時期を遅角側に制御する触媒暖機制御が開始される。この触媒暖機制御によるエンジントルク低下に合わせて、スロットルバルブが開側に制御されてエンジントルクが引き上げられる。このようにスロットルバルブが開かれることから、触媒暖機制御においては、吸気管圧力が上昇して倍力機構のブレーキアシスト力が低下する。このため、無段変速機の変速比を高速側にアップシフトさせて駆動輪トルクを低下させる。このように、触媒暖機制御に伴ってエンジントルクが上昇するとともにブレーキアシスト力が低下した場合であっても、アップシフトによって駆動輪トルクの上昇を回避することができ、運転手の意図しない車両発進を防止することが可能となる。
(もっと読む)
車両および車両用制御方法

【課題】走行路面の誤判定を抑制して、走行路面に応じた駆動力制御を実現する。
【解決手段】ECUは、バンドパスフィルタ処理を実行するステップ(S102)と、積算値算出処理を実行するステップ(S104)と、ローパスフィルタ処理を実行するステップ(S106)と、所定時間毎に今回の第2フィルタ出力値と前回の第2フィルタ出力値との差がしきい値α以上であるか否かを判定するステップ(S114)と、今回の第2フィルタ出力値と前回の第2フィルタ出力値との差がしきい値α以上である場合に(S114にてYES)、増加カウント値Ciに「1」を加算するステップ(S116)と、第2フィルタ出力値Fo2がβ以上であって、かつ、増加カウント値Ciがγ以上である場合に(S122にてYES)、駆動力の制限制御を実行するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
道路勾配計測装置及び道路勾配計測方法
【課題】道路勾配の計測精度の向上を図る。
【解決手段】GPS12の受信感度が所定のレベル以上であって標高に変化が検出された場合、勾配算出部25は、GPSデータ取得部21によりGPS12から取得された走行速度、標高等のデータを用いて道路の勾配を算出する。標高に変化がないとき、定地走行抵抗算出部22は、ECUデータ取得部23により取得されたECUデータを用いて定地走行抵抗を算出し、定地走行抵抗保持部27に保持させる。このときの勾配は0である。GPS12の受信感度が所定のレベルに達していないとき、勾配算出部25は、保持されている定地走行抵抗とECUデータ取得部23により取得されたECUデータを用いて道路の勾配を算出する。
(もっと読む)
車両用パワートレーン制御装置
【課題】駆動系保護のために行われる出力トルク制限の解除可否を適切に判定する車両用パワートレーン制御装置を提供する。
【解決手段】走行用動力源の出力トルクを制御する車両用パワートレーン制御装置100を、出力トルクを要求トルク入力手段の操作量に関わらず所定の制限トルク以下に制限する出力トルク制限手段と、出力トルク制限の解除操作が入力される解除操作入力手段107と、タイヤのグリップ余力を判定するグリップ状態判定手段110とを備え、出力トルク制御手段は解除操作が入力されかつ要求トルク入力手段の操作量が所定値以上である場合に、所定のトルク制限解除期間にわたって出力トルク制限を解除するとともに、グリップ余力の不足を判定した場合は出力トルク制限の解除を禁止する構成とする。
(もっと読む)
車両の運動制御装置
【課題】違和感が少なく、安全性能向上を可能とする車両の運転制御装置を提供する。
【解決手段】四輪の駆動力と制動力を独立に制御可能な車両の運動制御装置において、車両の横運動に連係した前後加減速制御指令に基づいて、四輪のうちの左右輪に略同一の駆動力及び制動力を発生する第1のモード(G−Vectoring制御)と、車両の横滑り情報から算出した目標ヨーモーメントに基づいて、四輪のうちの左右輪に異なる駆動力及び制動力を発生する第2のモード(横滑り防止制御)と、を有し、目標ヨーモーメントが予め定めた閾値以下のときは第1のモードが選択され、目標ヨーモーメントが閾値よりも大きいときは第2のモードが選択される。
(もっと読む)
車両制御装置
【課題】運転者に与える違和感を抑制しつつ、目標値に実際の項目を近づけられる車両制御装置を提供すること。
【解決手段】走行環境あるいは走行条件の少なくとも一方に基づいて運転者に加わる加速度が変化する車両運動に係る項目(加速度)の目標値101を設定する目標値設定手段と、運転者の要求値102を設定する要求値設定手段と、対数値で比較したときの要求値との差が第一の範囲内となる項目の範囲である所定範囲A、および、対数値の変化速度で比較したときの要求値との差が第二の範囲内となる項目の変化速度の範囲である所定変化速度範囲をそれぞれ設定する範囲設定手段と、所定範囲内で項目を目標値に近づけ、かつ、項目の変化速度が所定変化速度範囲内となるように項目の指令値105を設定する指令値設定手段と、指令値に基づいて車両を制御する制御手段とを備え、第二の範囲は、要求値の変化速度に応じて可変に設定される。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、回生トルクによる車両減速中にて回生トルク不足が検出された場合において電動機接続状態を適切に切り替えること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、及び、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」に選択可能な切替機構が備えられる。電動機回生トルク(−Tm)による車両減速中において「回生トルク不足状態」が検出され(t2)、且つ、電動機接続状態を切り替えた方が「電動機回生最大トルク」がより大きくなる場合、電動機接続状態が切り替えられる(t3〜t4)。且つ、この切り替えに伴って発生する「電動機回生トルクの谷」がE/G減速トルク(−Te)により補償される(t2〜t5)。
(もっと読む)
ハイブリッド車両
【課題】回生制動中の制動力低下の抑制とモータ/ジェネレータの接続された変速機構内の各変速段間での変速段の切り替えの両立。
【解決手段】内燃機関10と、第1及び第2の変速機構40,50と、第1及び第2のクラッチ61,62と、第1変速機構40に連結したモータ/ジェネレータ20と、を備え、電子制御装置100に、第1及び第2の変速機構40,50から各々選択された各変速段の入力側と出力側の夫々の歯車を係合状態にする変速制御手段と、第1及び第2のクラッチ61,62を解放状態にして行う回生制動中にモータ/ジェネレータ20の回転軸と係合状態にある第1変速機構40の各変速段間で変速段の切り替えを行う場合、モータ/ジェネレータ20と係合状態にない第2変速機構50に係る第2クラッチ62を係合させるクラッチ制御手段と、を設けること。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電動機と、その電動機に動力伝達可能に連結された変速部とを備える車両用動力伝達装置において、回生制御中に変速が実施されるに際して、トルク相中に発生する引き込み感を減少することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】回生制御手段実行中に自動変速部20の変速が実施されるとき、回生制御手段94は、自動変速部20のトルク相中において、自動変速部20への回生トルク(入力負トルク)を減少させるため、トルク相中に発生する回生トルク(入力負トルク)によって生じる引き込み感を減少させることができる。
(もっと読む)
車両用駆動装置の制御装置
【課題】電気式差動部と変速部とを備える車両用駆動装置において、変速部のダウンシフトとエンジンの始動とが重なって実行される際に、エンジンの始動と変速部の変速とを共に進行させつつ第1電動機の過回転を防止する。
【解決手段】自動変速部20のダウンシフトとエンジン8の始動とが重なって実行される場合は、第1電動機回転速度NM1が負側の第1電動機過回転速度NM1LIMに到達することが防止されるように、自動変速部20のダウンシフトと重なって実行されずエンジン8の始動のみが単独で実行される場合の出力トルクに比較して、第1電動機M1によるクランキングトルクTCM1を増大させると共に第2電動機M2による反力キャンセルトルクTCCM2を減少させるので、第2電動機回転速度NM2の上昇速度が抑制されることと相まって第1電動機回転速度NM1が確実に上昇させられて速やかにエンジン8が始動させられる。
(もっと読む)
車両の制御装置
【課題】EGR弁閉じ異常時において失火発生抑制のためスロットル弁開度を大きくすることに起因する内燃機関の出力トルクの増大に伴って発生する問題に対処すること。
【解決手段】車両停止中において、EGR弁閉じ異常の発生を受けて失火抑制制御によりスロットル弁開度が大きくされた場合、急発進抑制制御により自動変速機の減速比が小さくされる。この結果、駆動輪の駆動トルクが減少し、失火抑制制御に起因するエンジン出力トルク増大により車両発進時の加速度が過剰となる事態の発生が抑制される。急発進抑制制御が実行された状態で車両発進後、車体速度が所定速度に達した場合、車速抑制制御により自動変速機の減速比が大きくされる。この結果、車体速度が、減速比が大きい変速段の場合におけるエンジンの最大運転速度に対応する速度以下に制限されるから、エンジン出力トルク増大により車両走行時での車体速度が過剰となる事態の発生が抑制される。
(もっと読む)
運転支援装置、運転支援方法
【課題】意識低下状態から覚醒状態に復帰した場合でも、車両挙動を安定化させることができる運転支援装置及び運転支援方法を提供すること。
【解決手段】運転者の覚醒度に応じて運転者を支援する運転支援装置100において、運転者が意識低下状態から覚醒した直後か否かに応じて、運転者を支援する車両制御の態様を可変にする、ことを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】車両の自律走行運転と運転者の操作との協調制御システムに於いて、自律走行制御装置による制御の介入の大きさを車両の前後方向と左右方向で別々の程度にて調節できるようにすること。
【解決手段】本発明の車両走行制御装置は、車両の理想軌跡を生成する理想軌跡生成手段と、理想軌跡と運転者の操作に基づいて車両の走行軌跡を制御する走行軌跡制御手段とを含み、走行軌跡制御手段が理想軌跡に対する車両の左右方向の位置を調節するアクチュエータを制御する左右方向制御手段と理想軌跡に対する車両の前後方向の位置を調節するアクチュエータを制御する前後方向制御手段とを含み、左右方向のアクチュエータに与える制御量と前後方向のアクチュエータに与える制御量とが互いに独立に決定されることを特徴とする。
(もっと読む)
車両制御装置
【課題】ドライバの個人毎の好みに適合したタイミングで減速制御あるいは加速制御を実行することができる車両制御装置を提供する。
【解決手段】
自車の走行中に補正接近離間状態評価指標KdB_cを算出し、その補正接近離間状態評価指標KdB_cをその算出時の車間距離Dとともに運転者別に記憶装置60に記憶する。そして、記憶装置60に運転者別に記憶されている補正接近離間状態評価指標KdB_cの距離毎の最大値を求め(S10)、その最大値に基づいて、先行車との距離Dと距離毎の補正接近離間状態評価指標KdB_cの最大値との関係式を決定する(S20)。さらに、その関係式を補正することで、加減速制御の実行開始タイミングか否かを判別するための閾値を算出する速度制御開始判別式を決定する。
(もっと読む)
車両の統合制御システム
【課題】フェイルセーフ性を向上させるとともに、車両制御機能の追加に容易に対応可能な、車両の統合制御システムを提供する。
【解決手段】統合制御システムは、運転者の操作に基づいて、駆動系を制御する主制御系(アクセル)と、制動系を制御する主制御系(ブレーキ)と、操舵系を制御する主制御系(ステア)と、車両の周囲の環境情報または運転者に関する情報に基づいて、各主制御系において用いられる情報を作成して出力するアドバイザユニットと、予め定められた挙動を車両に実現させるために各主制御系において用いられる情報を作成して出力するエージェントユニットと、現在の車両の動的状態に基づいて、各主制御系において用いられる情報を作成して出力するサポータユニットとを含む。
(もっと読む)
駆動力源回転数制御装置
【課題】加速要求時に車速変化にエンジン回転数を連動させるCVTを備えた車両において走行抵抗増加などで車両が減速してもドライバーに違和感を生じさせないようにする。
【解決手段】加速要求時に車速SPDが減速状態であると判定された場合(S228でNO)は、加速状態であると判定された場合(S228でYES)よりも、車速SPD変化(Dnoutcvt)に対して連動するエンジン回転数の低下を抑制している(S232,S234)。この低下抑制は、目標入力軸回転数NINLINEの変化勾配を設定することで車速SPDに対する連動を実行するに際し、加速状態傾斜係数βa(SPD,ACCP)の絶対値より、減速状態傾斜係数βb(SPD,ACCP)の絶対値を小さくすることで連動を鈍化することで行われている。このことにより加速要求時に減速状態となってもエンジン回転数の低下が少なくなり、車両減速を助長することがないのでドライバーに違和感を生じさせないようにできる。
(もっと読む)
加加速度情報を用いた車両のヨーモーメント制御装置
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度(V)を検出する第1の検出手段と、車両の横方向の加加速度(Gy_dot)を検出する第2の検出手段と、車両のヨー角加速度(r_dot)を検出する第3の検出手段と、を有し、第2の検出手段で検出した車両の横方向の加加速度(Gy_dot)を第1の検出手段で検出した車両の前後方向の速度(V)で除した値(Gy_dot/V)と、第3の検出手段で検出した車両のヨー角加速度(r_dot)との差が小さくなるように、制御手段により車両のヨーモーメントを制御する。
(もっと読む)
車両制御装置
【課題】車体モデルと、シャーシモデルと、タイヤモデルとに分離・階層化された車両モデルを用いながら、タイヤの振動状態を精度良く推測する。
【解決手段】
車両モデルにおけるタイヤモデル20は、後輪タイヤモデル21と、前輪タイヤモデル22と、これらの後輪タイヤモデル21と前輪タイヤモデル22とを仮想的に連結する仮想連結要素モデル23とからなる。これにより、タイヤモデル20とシャーシモデル24とを分離しながら、前輪タイヤと後輪タイヤとの間で作用する振動状態の影響を考慮することができるようになり、前輪タイヤ及び後輪タイヤに生じる振動を精度良く推測することが可能になる。
(もっと読む)
無段変速機の変速制御装置およびその変速制御方法
【課題】変速ショックを低減し、かつ、加速応答性を向上させることが可能な無段変速機の変速制御装置および無段変速機の変速制御方法を提供することを目的とする。
【解決手段】エンジン出力トルクを駆動輪に伝達する無段変速機の変速制御装置において、ECU50は、アクセルONを検出した場合に、回転慣性による損失トルクを推定し、推定した回転慣性による損失トルクTlossを補償するエンジン補償トルク制御を開始し、また、エンジン出力トルクTegが推定した回転慣性による損失トルクTlossよりも大きくなった場合に、無段変速機30(油圧制御装置40)に変速開始を指示する。
(もっと読む)
車両の制御装置
【課題】定速運転時においてアクセル操作に関するドライバの負担を軽減する車両の制御装置を提供する。
【解決手段】車両制御システムは、エンジン11の出力を調整するスロットル制御装置16と、その出力を駆動輪側に伝達する無段変速機26と、システム各部を制御するECU50とを備えている。ECU50は、車両が一定速度で走行している時のアクセル操作量を基準にして同アクセル操作量の近傍領域に加速度F/B制御の不感帯を設ける。そして、ECU50は、アクセル操作量が上記不感帯の領域外にあると判定した場合、都度のアクセル操作量に基づいて目標加速度を算出し、その目標加速度に車両の実加速度を一致させるべく加速度F/B制御を実施する。一方、アクセル操作量が上記不感帯の領域内にあると判定した場合、ECU50は、加速度F/B制御に代えて、実車速をその目標値に一致させるべく車速F/B制御を実施する。
(もっと読む)
1 - 20 / 37
[ Back to top ]