
Fターム[3D042BD03]の内容
動力伝達装置の配置〜伝動 (4,025) | 流体伝動装置の検出,制御 (139) | 検出(入力信号〜機械的なものも含む) (73) | 原動機の状況 (13)
Fターム[3D042BD03]に分類される特許
1 - 13 / 13
エンジン始動のためのチャージ・バイパス・システム
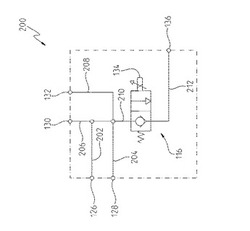
【課題】車両のエンジン始動システムを提供する。
【解決手段】エンジン始動システムは、エンジンとチャージシステムを含む。車両は、エンジンの速度を測定するためのエンジン速度センサも含む。チャージシステムはエンジンと結合されており、チャージポンプを含む。車両はさらに、制御ユニットおよびチャージシステムの流体温度を感知するための温度センサを含む。温度センサは制御ユニットに電気的に結合されている。バイパスシステムはチャージシステムに流体結合しており、バルブ116とソレノイド134を含む。ソレノイド134は、速度センサで測定される速度および温度センサで感知される温度に反応してバルブ116を制御するために、制御ユニットがソレノイドに電圧を加えるように、制御ユニットに電気的に結合される。
(もっと読む)
油圧駆動式の車両、およびその制御方法と制御装置

【課題】HST(静液圧トランスミッション)を有するパワートレインを備えた車両において、クリープ現象、アクセル操作に対する発進タイムラグ、走行中にアクセル操作量を急激に減らした時のエンジン・オーバーラン、及び走行中に負荷が急増した時のエンジン・ストールなどの問題を解決する。
【解決手段】パワートレイン10内のHSTコントローラ15が、アクセル操作量に応じてHSTポンプ23の最大吸収トルクを制御する。他方、車両の走行中にアクセル操作量が急激に減った時、または車両の走行中にエンジン回転数が急激に減った時には、エンジン回転速度に応じてHSTポンプ23の最大吸収トルクが制御される。
(もっと読む)
油圧駆動式の車両、およびその制御方法と装置
【課題】エンジンからの動力をHST(可変容量型油圧ポンプと油圧モータを接続した閉回路)を介して駆動輪へ伝えるように構成された車両、例えばフォークリフトにおいて、発進又は加速のために急激で大きなアクセル操作が行われた場合に燃費の悪化と過度な加速を防ぐ。
【解決手段】HST21を有するパワートレイン10を備えたフォークリフト1では、アクセル操作制御部15aが、実際のアクセル操作量5aを入力し、実際のアクセル操作量5aの時間当たり増加率の所定の制限値に制限してなる制御用アクセル操作量11bを生成する。実際のアクセル操作量5aの急激な増加時に、制御用アクセル操作量11bはそれよりゆるやかに増加する。エンジンコントローラ11は、その制御用アクセル操作量15cに基づいてエンジン13を制御する。
(もっと読む)
作業車の負荷制御装置
【課題】エンジン負荷が大きいほど走行駆動系の変速装置を減速操作するにあたり、走行駆動系とは別の駆動系である外部動力取出軸からの動力で駆動される作業装置が安定的に稼働するように制御できる作業車の負荷制御装置を提供する。
【解決手段】走行駆動系とは別系の外部動力取出軸を介してエンジン動力が伝達されるPTO系作業装置の作動の有無を判別する作業状態検出手段74を備え、PTO系作業装置の作動状態が検出されているときにおける変速操作手段による減速操作量が、PTO系作業装置の非作動状態が検出されているときにおける減速操作量よりも大きくなるように制御する。
(もっと読む)
作業車輌
【課題】変速操作部材の操作に応じてHSTの出力調整部材を作動させる変速用電動アクチュエータの作動制御を行う制御装置を備えた作業車輌において、スタータ駆動時における変速用電動アクチュエータの誤作動を防止する。
【解決手段】制御装置は、メイン操作部材の操作状態を検出する主電源/スタータセンサからの信号に基づき主電源のオン/オフ切替制御及びスタータのオン/オフ切替制御を行うと共に、変速操作側センサ及び変速作動側センサからの信号に基づき変速用電動アクチュエータの作動制御を行う車速制御を実行するように構成されている。前記制御装置は、メイン操作部材の主電源オフ位置から主電源オン位置への操作に応じて前記車速制御を開始させると共に、スタータがオン状態の間には変速用電動アクチュエータの作動制御を禁止する。
(もっと読む)
ピストンポンプ及びそれを備えた動力伝達装置、並びにピストンモータ
【課題】ポンプ容量を変更可能であり、かつ装置の小型化を実現することが可能なピストンポンプを提供する。
【解決手段】軸線Ax回りに回転自在に設けられ、カム面15を有するアウターレース13と、アウターレース13に対して相対回転可能に設けられ、複数のシリンダ16を有するインナーレース15とを備えたピストンポンプ7において、インナーレース15に複数のシリンダ16として第1の直径L1の第1シリンダ16A及び第1の直径L1より大きい第2の直径L2の第2シリンダ16Bが設けられ、第1シリンダ16Aにて第1シリンダ群が構成されるとともに第2シリンダ16Bで第2シリンダ群が構成され、シリンダ16に吸入される流体の流量及びシリンダ16から吐出される流体の流量をシリンダ群毎に別々に変更可能な油圧制御装置110を備えている。
(もっと読む)
無段変速機及び不整地走行車両
【課題】HMTの経年劣化並びに燃料の無駄使いを抑制し得て、しかも、クラッチ電子制御機構を用いることなく発進時斜板傾斜角度制御を行うことができる無段変速機を提供する。
【解決手段】エンジン11から駆動輪12に至る動力伝達経路のエンジン出力軸11a寄りに配置された機械式トランスミッション(MT)13と、MT13に並設されて流体の静圧エネルギーを利用する静液圧式トランスミッション(HST)14と、によって無段階の変速を行うハイドロメカニカルトランスミッション(HMT)15と、エンジン11とHMT15との間のエンジン出力軸11aに配置された自動遠心クラッチ機構16と、を備えている。
(もっと読む)
油圧式走行車両
【課題】応援モータが設けられていない油圧式走行車両であっても、牽引等によって当該油圧式走行車両を走行させる時にステアリング機構へ作動油を供給できるようにする。
【解決手段】油圧式走行車両は、エンジン2によって駆動されて作動油を吐出する走行用油圧ポンプ6と、その走行用油圧ポンプ6と閉回路30で接続され、走行用油圧ポンプ6から吐出された作動油の油圧によって駆動されることにより前輪50,50を回転させる前輪側モータ8と、閉回路30に作動油を補給するチャージポンプ20と、油圧によって駆動されることにより、ステアリングの操作に応じて前輪50,50の転舵に供する力を発生させるステアリング機構18と、前輪50,50の回転をチャージポンプ20に伝達する前輪側伝達機構12と、前輪50,50の回転によってチャージポンプ20から吐出された作動油をステアリング機構18へ流す作動油回路22とを備える。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を、油圧無段変速機50を介して左右の走行部に伝達するように構成され、左右の走行クローラに対する走行機体の相対高さを変更調節する左右の車高調節機構と、主変速レバー13と、操向ハンドル10とを備えた走行車両において、動力損失を大幅に低減できるようにする。
【解決手段】油圧無段変速機50の変速出力を調節する電動モータ151,161と、コントローラ170と、複数の変速出力パターンを予め記憶させたPROM172とを備える。コントローラ170は、操向位置センサ117、主変速位置センサ135及び副変速位置センサ145の検出情報と、走行機体1の車高及び基準高さの関係に対応して選択された変速出力パターンに基づき、直進電動モータ151及び旋回電動モータ161を作動させて走行機体1の車速及び進行方向を調節するという変速操向制御を実行する。
(もっと読む)
作業車
【課題】油圧無段変速装置を用いた作業車の作業走行中における急加速、急減速の防止。
【解決手段】油圧無段変速装置1を介して走行伝動する作業車において、油圧無段変速装置1のトラニオン軸3を制御する足踏み方式のHSTペダル32を設け、該HSTペダル32を操作することで、作業車のエンジン回転数が変更されると共に油圧無段変速装置1のトラニオン軸3も制御される構成とし、作業走行に切り換える切換手段を設け、該切換手段により作業走行をしている状態においては、前記油圧無段変速装置1のトラニオン軸3の回転速度を路上走行中に対して低速の回転速度で動かす制御手段100を設けたことを特徴とする作業車の構成とする。
(もっと読む)
作業車両
【課題】オートクルーズの解除後の再度のオートクルーズの開始動作を頻繁に行う必要のないオートクルーズ操作性に優れた作業車両を提供すること。
【解決手段】オートクルーズスイッチ62が入り操作されると電動モータ53によるトラニオン軸16aの回動角度を一定に保持してオートクルージング走行が可能となる。車両がオートクルーズで前進中、前後進切換レバー57を中立または後進側に切換えた場合にもオートクルーズで前進していた時のトラニオン軸16aの回動角度を記憶しておき、前後進切換レバー57が再度前進側に操作されたら記憶していたトラニオン軸16aの回動角度にトラニオン軸16aを駆動する。頻繁に前後進を繰返す芝刈り作業などの操作性が従来より向上する。
(もっと読む)
作業車輌
【課題】エンジンからの出力を利用して駆動される走行部及び作業部を備えた作業車輌であって、前記エンジンへの過負荷を防止しつつ、作業効率の低下を可及的に防止し得る作業車輌を提供する。
【解決手段】作業車輌1において、制御部200は、変速操作部材53の操作量に応じた基準出力に対してエンジン出力検出装置310の検出結果に基づく減速率Yを乗算させた出力をHST102の目標回転出力として出力調整部材108の作動制御を行う負荷制御モードを備え、前記負荷制御モードは、エンジン31の出力回転数が第1閾値Xfを超えている場合には減速率Yを1とし、エンジンの出力回転数が前記第1閾値Xf以下となると該出力回転数に応じた減速率Yを選択するように構成されている。
(もっと読む)
作業車両の制御装置
【課題】負荷が急変する場合には、エンストが発生しないように減速できる負荷制御が容易にできる作業車両の制御装置を提供する。
【解決手段】負荷制御モード切替スイッチをONにする(S151)。変速比パターンを設定する(S152)。前進(後進)ペダルの踏込み量を読込む(S153)。読み込み数値に基づいて、変速比パターン上のペダル踏込み量に対応する目標変速比値を算出する(S154)。現在のエンジン回転数、出力軸回転数読込み、現在変速比値及び負荷トルクを算出(S155、S156)。次いで、変速比・負荷マップを読み出す(S157)。現在変速比値における負荷トルクが目標変速比値におけるエンストライン(α線)上の負荷トルクを越えるときには、エンスト防止ライン(β線)に沿った線上での現在変速比値に相当する箇所まで、目標変速比値を減少させるように、比例電磁弁への印加電圧を補正する(S158、S159)。
(もっと読む)
1 - 13 / 13
[ Back to top ]