
Fターム[3D043EB11]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDの操作及び切替機構 (595) | 4WDにおける切替機構 (305)
Fターム[3D043EB11]の下位に属するFターム
2WDと4WDの切替え (140)
前後輪の配分トルクの切替え (122)
変速切替機構 (37)
PTOへの切替え
Fターム[3D043EB11]に分類される特許
1 - 6 / 6
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなえること。
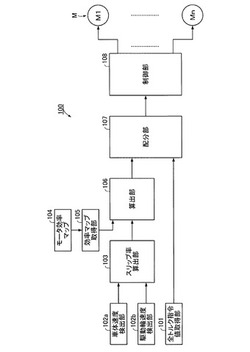
【解決手段】トルク配分装置100は、入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて、駆動輪におけるスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて、駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値と最適効率トルク値に基づいて、各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて、各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
駆動装置

【課題】装置の小型化を図りながら車両振動を抑制することを可能とする。
【解決手段】伝動モータ5から伝達されたトルクを左右の結合フランジ部147,149から左右のアクスル・シャフトへ分配出力するリヤ・デファレンシャル装置47を備え、リヤ・デファレンシャル装置47が、結合フランジ部147,149の近傍に軸方向への突出部167を有する減速駆動装置23において、結合フランジ部147を、突出部167に対し軸交差方向に重なり配置したことを特徴とする。
(もっと読む)
各輪の駆動障害に対処した個別駆動式自動車
【課題】少なくとも左右一対の車輪の各々のために個別に駆動力を発生する個別の駆動力発生手段を備えた自動車に於いて、左右の個別の駆動力発生手段のいずれかに駆動力を正常に発生しない障害が生じたとき、それに適切に対処する自動車を提供する。
【解決手段】前記障害が検出されたとき、障害を生じた駆動力発生手段およびこれと左右反対側の一つの駆動力発生手段を除く駆動力発生手段により要求駆動力を賄えるときには、障害を生じた駆動力発生手段およびこれと左右反対側の一つの駆動力発生手段を休止させ、残る駆動力発生手段により駆動を行わせ、賄えないときには障害を生じた駆動力発生装置のみを休止させ、操舵性能を自動修正する。
(もっと読む)
4輪駆動車両の制御装置
【課題】 手動変速機を有する車両において動力伝達可能状態にない場合、アクセル感応制御を禁止する4輪駆動車両の制御装置を提供する。
【解決手段】 本発明の4WDコントローラ38は、前後輪10、20のうち一方をエンジン12により駆動し他方をモータ22により駆動する車両の発進時に、4輪駆動状態となるよう、アクセルペダル開度に応じてモータ22を駆動制御する4輪駆動制御手段とエンジン12と前輪10との間に配置される発進クラッチ14およびマニュアルトランスミッション16の少なくとも一方が動力伝達可能状態にあるか否かを判断する動力伝達状態判断手段を有し、動力伝達状態判断手段が動力伝達可能状態にないと判断したとき、アクセル感応制御を禁止することを特徴とする。
(もっと読む)
車両用駆動力制御装置
【課題】 電動モータの出力を従駆動輪に伝達するための伝達路に介挿された電磁クラッチを締結する際に、電動モータのモータ軸に生じるトルク変動を低減する。
【解決手段】 スリップが生じたときに電動モータ3を最大トルクで駆動する。このとき、スリップ発生時の後輪速度を予測し、この後輪速度を電動モータ3の回転数相当に変換した後輪速相当値よりも大きな値を目標回転数Vm*とし、電動モータ3をこの目標回転数Vm*まで上昇させた後、電動モータ3への電圧供給を停止しフリーラン状態とする。フリクション等により低下する電動モータ3の回転数と、実際の後輪速相当値とが同等となったとき、電磁クラッチ10を締結させる。フリーラン状態の電動モータ3にはトルクが発生していないから、この状態で電磁クラッチ10を締結させることにより電動モータ3のモータ軸に生じるトルク変動を低減することができる。
(もっと読む)
車両用駆動装置及びこれを備えた自動車
【課題】 電動機の各ロータの動作制御が容易な車両用駆動装置及びこれを備えた自動車を提供する。
【解決手段】 本発明の車両用駆動装置1Aは、一つのステータ21でインナーロータ22及びアウターロータ23をそれぞれ駆動する電動機を備える。そして、リングギア34、サンギア35及びキャリア36を有し、サンギア35に接続された出力軸32とキャリア36に接続された出力軸33との間の差動を許容する遊星差動機構3を備え、アウターロータがリングギア34に接続された入力軸31に連結されるとともに、インナーロータ22が出力軸32に連結される。
(もっと読む)
1 - 6 / 6
[ Back to top ]