
Fターム[3D044AC02]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両の状態に関するもの (841) | 推進装置 (269)
Fターム[3D044AC02]の下位に属するFターム
スロットル弁開度 (50)
機関軸回転数、出力、トルク (59)
エンジン温度、冷却水温 (19)
吸気圧、吸気温 (12)
気筒数 (1)
始動 (9)
アクセルペダル (111)
Fターム[3D044AC02]に分類される特許
1 - 8 / 8
ハイブリッド車両の制御装置

【課題】減速時に、燃費向上を図り、効率良く回生を行うことのできるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の運転状態に基づいて、エンジンのクランク軸におけるクランク端目標トルクを算出し、クランク端目標トルクが予め定められる所定値よりも小さい場合にハイブリッド車両の減速状態と判断し、その直後からロックアップクラッチを締結し、減速状態が判断された場合に、クランク端目標トルクに基づき、エンジンのエンジン目標トルク及びモータジェネレータのモータ目標トルクを算出し、減速トルク算出手段により算出された前記モータ目標トルクに基づいて、モータジェネレータによる回生が行われるよう制御する。
(もっと読む)
自動車の追従走行装置

【課題】
自動車の追従走行装置において、自車両のギクシャク運転を抑制し、乗員の乗り心地や安心感の向上を図ることを課題とする。
【解決手段】
追従走行装置1は、車間距離検出手段11で検出された前方車両Wfと自車両Wとの車間距離L1が目標車間距離Ltに維持されるように自車両Wの車速vを制御する車速制御手段17,18を備えている。追従走行装置1は、前々方車両Wffと前方車両Wfとの車間距離L2が所定の車間距離Lmよりも短くなったときは短くなっていないときよりも車速制御手段17,18の制御感度を鈍化させるコントロールユニット10を備えている。
(もっと読む)
ハイブリッド車の定速走行制御装置
【課題】 定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができるハイブリッド車の定速走行制御装置を提供すること。
【解決手段】 駆動源としてエンジン301と駆動用モータ303を有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定する手段とした。
(もっと読む)
車両制御装置、その制御方法及びプログラム
【課題】 低速走行エリアでの安全な走行を実現することができる車両制御装置を提供する。
【解決手段】 駆動源としてモータ3を少なくとも備え、車両の走行を画面の表示によって案内するナビゲーションシステムを搭載した車両1のコントローラ10であって、ナビゲーションシステム21からの通知により、低速走行が必要な低速走行エリアに接近したことを検出すると、モータ3への駆動電流を制限し、車速が所定値以上にならないように制御する。従って、ドライバの誤操作によってアクセル踏み込み量が大きくなっても車両速度を制限することができ、低速走行エリアでの安全な走行を実現することができる。このため、ドライバや周囲の安全も確保することができる。
(もっと読む)
走行支援装置
【課題】 運転者によるブレーキの緩め始めの早いタイミングで警報出力を行うことによって安全性を高めるとともに、不必要な警報出力を抑制することにより運転者に不快感や違和感を与えることがない走行支援装置を提供する。
【解決手段】 自車両の周囲の障害物を検出する障害物検出手段10と、自車両が進行方向に進行することに対する危険性を判定する危険性判定手段5と、ブレーキ踏力の状態を検出するブレーキ踏力検出手段23と、警報判定手段6とを備え、この警報判定手段6は、危険性判定手段5により危険性ありと判定され、かつブレーキ踏力検出手段23によりブレーキ踏力が緩み側に所定量変化したことを検出した際に、警報出力を行うと判定する。
(もっと読む)
乗員保護システム、及び乗員保護装置
【課題】乗員、特に子供の安全性を向上させるための乗員保護システムを提供すること
。
【解決手段】車両の乗員の安全性を図るための乗員保護システムにおいて、乗員が大人
であるか子供であるかを判別する大人子供判別手段と、乗員の位置を検出する乗員位置検
出手段と、大人子供判別手段による判別結果、及び乗員位置検出手段による検出結果に基
づいて得られる、子供の乗車状況に応じて、車載機器の制御を行う子供保護制御手段とを
装備する。
(もっと読む)
車両用走行制御装置
【課題】 曲線路で隣接車と長い時間並走することを避け、隣接車との異常接近を防止する。
【解決手段】 自車前方の曲線路までの距離と、隣接車との車間距離および相対速度と、自車速とに基づいて自車前方の曲線路で隣接車と並走するか否かを判定し、自車前方の曲線路で隣接車と並走すると判定され、かつ隣接車との相対速度が第1のしきい値以下の場合に、自車前方の曲線路で隣接車との並走を禁止する。
(もっと読む)
車両ガイドシステム
交通状況を表す入力量(V,e1,ek,di,vri,φi)に従って,かつ動的に変化可能なパラメータに従って,車両をガイドするための操作量(am,ab)を用意する方法は,複数の入力量のセットから,唯一の評価量(g)が形成され,かつパラメータの複数のものが,同一の評価量を用いて定められることを特徴としている。 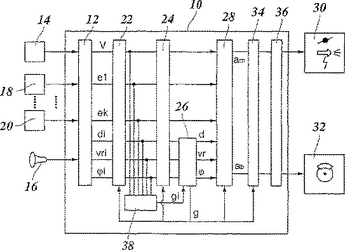 (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]