
Fターム[3D044AC03]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両の状態に関するもの (841) | 推進装置 (269) | スロットル弁開度 (50)
Fターム[3D044AC03]に分類される特許
1 - 20 / 50
運転支援装置および運転支援方法
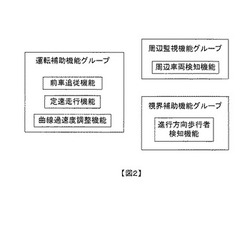
【課題】複数の運転支援機能を運転支援内容に基づいてグループ化し、ユーザからの指示で、運転支援機能を作動させることが可能な装置及び方法を提供する。
【解決手段】運転支援装置は、車間距離センサと、車載カメラと、車速センサと、操作スイッチ群と、スロットルアクチュエータと、ブレーキアクチュエータと、ハンドルアクチュエータとディスプレイと、スピーカと、車両コントローラとから構成される。ドライバの運転を支援する機能は、前車追従走行機能、定速走行機能、曲線過速度調整機能、周辺車両検知機能、進行方向歩行者検知機能から構成され、運転支援内容に基づいてグループされる。車両コントローラは、視界補助スイッチ、運転補助スイッチ、周辺監視スイッチからなる操作スイッチ群の動作状態により、グループ化した機能を作動させる。また、車両コントローラは、操作スイッチ群の動作状態をディスプレイに表示する。
(もっと読む)
エンジン制御装置及びエンジン制御方法

【課題】エンジン制御においてアイドル条件が成立しても車速の調整を容易にし、かつ無駄なエネルギーの消費を減少させる。
【解決手段】本発明のエンジン制御装置においては、渋滞などの影響で車両がアイドリング状態でクリープ走行しているような場合でも、基本的にエンジン回転数に基づく回転数制御ではなくオートクルーズ制御が行われる。このため、車両が低速域で走行している場合にも車速の微調整が容易になる。その結果、基本的にブレーキ制御を伴わないか或いはブレーキ制御が抑制され、車両の低速走行時における無駄なエネルギーの消費を減少させることができる。
(もっと読む)
鞍乗り型車両の定速走行制御装置
【課題】定速走行制御が解除されるとき、目標スロットル開度制御においてスロットル開度が運転者の予期しない値とならず、走行フィーリングを損ねることがないと共に、不要な機関出力を生じないようにした鞍乗り型車両の定速走行制御装置を提供する。
【解決手段】定速走行制御を実行する定速走行制御実行手段を少なくとも備えた鞍乗り型車両の定速走行制御装置において、実スロットル開度が指令スロットル開度APSなどから設定される目標スロットル開度となるようにアクチュエータを駆動するスロットル目標開度制御を実行するスロットル目標開度制御実行手段を備えると共に、指令スロットル開度APSと実スロットル開度TPSが所定の関係にあるか否か判定し(S60)、肯定されると共に、解除条件が成立すると判断される場合(S62からS66)、定速走行制御からスロットル目標開度制御に切り換える(S50)。
(もっと読む)
内燃機関の吸入空気量調整装置
【課題】車速が所望する所定車速になったとき、またはクルーズコントロールシステムにより所望する一定速度に車速が設定されたときに、大きなトルクの段差による車速のハンチングを確実に防止することができる内燃機関の吸入空気量調整装置を提供する。
【解決手段】車速が法規制最高速度に到達したとき、またはクルーズコントロールシステムにより所望する一定速度に車速が設定されたとき、SCVによる気筒内のスワール流強度を調整不能とするようにスワールコントロールバルブを開位置または閉位置に固定するとともに、ACISの可変吸気システム制御バルブによる開閉切り換えを禁止するようにサージタンク内の複数の室を連通状態または遮断状態に固定し、この状態で、車速を法規制最高速度未満まで減速、または車速を一定速度に保つように、電子制御スロットルバルブによるスロットル開度の調整を実行させている。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速時に、燃費向上を図り、効率良く回生を行うことのできるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の運転状態に基づいて、エンジンのクランク軸におけるクランク端目標トルクを算出し、クランク端目標トルクが予め定められる所定値よりも小さい場合にハイブリッド車両の減速状態と判断し、その直後からロックアップクラッチを締結し、減速状態が判断された場合に、クランク端目標トルクに基づき、エンジンのエンジン目標トルク及びモータジェネレータのモータ目標トルクを算出し、減速トルク算出手段により算出された前記モータ目標トルクに基づいて、モータジェネレータによる回生が行われるよう制御する。
(もっと読む)
吸気制御装置
【課題】機関本体に接続される吸気路形成体に吸気路を横切って車体フレームの左右方向に延びる弁軸が回動可能に支承され、スロットル弁が弁軸に固定される吸気制御装置において、吸気路形成体が車体フレームの左右方向中央部に配置されるにあたって、車体フレームの左右方向中央部から吸気制御装置の両端までの距離を略等しくする。
【解決手段】弁軸24を回動駆動する動力を発揮し得る電動モータ28を含むアクチュエータ26が弁軸24の一端部に連結され、車両運転者のスロットル操作量を検出するスロットル操作量センサ27が吸気路形成体18に支持されて弁軸24の他端に連結される。
(もっと読む)
鞍乗り型車両
【課題】スロットル弁が固着される弁軸が吸気路形成体に回動可能に支承され、スロットルグリップの回動操作に応じて作動する弁軸駆動用電動モータを有するアクチュエータが弁軸の一端に連結され、スロットルグリップに弁軸の回動作動がフィードバックされる鞍乗り型車両において、ケーブルの取りまわしを不要として、弁軸駆動用電動モータで回動駆動される弁軸の回動作動をスロットルグリップにフィードバック可能とする。
【解決手段】アクチュエータの作動に伴う弁軸の回動量に応じた作動量で作動するグリップ駆動用電動モータ37が、操向ハンドル35に配設されるとともにスロットルグリップ36に連動、連結される。
(もっと読む)
車速制御装置
【課題】車両の進行方向にある物体に対する衝突回避性を高めて安全性の向上に寄与することができるようにする。
【解決手段】
物体検出手段25によって車両10の進行方向に物体が検出されなかった場合、または、この物体が追従対象判定手段32により追従対象であると判定されなかった場合に、目標車速を維持するための駆動力を発生するように駆動源11を制御する巡航制御を実行する巡航走行制御手段34と、追従対象判定手段32により物体が追従対象であると判定されなかった場合であって且つ所定の加速規制条件が満たされた場合に、巡航制御の実行よりも優先的に、車両10の加速を規制するように駆動源11を制御する加速規制制御を実行する加速規制手段37とをそなえて構成する。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。
(もっと読む)
ベルト式無段変速機の油圧制御装置
【課題】 ベルト式無段変速機の変速油圧がかえって過大になり、フリクションロスの増加および燃費の悪化を招来することを回避する。
【解決手段】 ステップS1においてクルーズコントロール制御がONになっている場合(Yes)、ステップS2へ進み、目標変速油圧tPvに含まれる余裕油圧を低減する。
(もっと読む)
走行制御装置
【課題】 先行車のロストを適切に判定する。
【解決手段】 先行車を検出して車間距離を計測し、先行車との車間距離が目標車間距離となるように先行車追従制御を行うとともに、所定時間の間、先行車を検出できなかった場合に先行車を見失ったと判定し、先行車追従制御を解除する走行制御装置において、先行車を検出できなくなったときに先行車の見失い原因を推定し、先行車の見失い原因に応じて前記所定時間を変更する。
(もっと読む)
車両の駆動力制御装置
【課題】車両がトンネルの出入口付近を走行中に、運転者のアクセルペダルの誤操作による急激な加速を抑制する。
【解決手段】
本発明における車両の駆動力制御装置は、車両の現在位置からトンネルの出入口までの距離に基づいて加速度の上限値を設定し(30)、目標加速度が上限値を超える場合は目標加速度を上限値に制限して(30)、エンジン及び変速機の少なくとも一方によって車両の駆動力を制御する(7、8)。
(もっと読む)
車両走行制御装置
【課題】 定速走行制御中において適切に変速を実行してドライバーの運転操作の煩雑化を防止する車両走行制御装置。
【解決手段】 定速走行制御時にエンジンブレーキが機能する状況になった場合、この時のエンジンブレーキ力が、調停部18が選択する定速走行制御側要求制駆動力Fctを満足できなければ、ドライバーは制動操作を行うことになる。AIシフト制御部20は、最大エンジンブレーキ力が選択制駆動力Fstのレベルに達していなければ、シフトダウンによりエンジンブレーキ力を強めて制駆動力を維持させることができる。このため目標車速Vctを維持してドライバーによるブレーキ操作等の煩雑化を防止することができる。又、カーブにおいて定速走行制御の目標車速を制限することによりドライバー操作の煩雑化と制御ハンチングを防止できる。
(もっと読む)
車両用走行制御装置
【課題】定速走行制御時に車線逸脱防止制御が作動して車両が減速した後に、再び車両が加速されるのを防ぐ。
【解決手段】定速走行制御が行われている時に、車線逸脱防止制御が作動した場合に、車線逸脱防止制御が作動した後の車速が設定速度より低い場合には、設定速度を、車線逸脱防止制御後の車速に変更する。これにより、車線逸脱防止制御が作動して、車速が低下した後に、車両が設定速度まで加速されるのを防ぐことができる。
(もっと読む)
先行車追従走行制御装置
【課題】 先行車追従走行制御における停止保持制御状態から制御解除状態への切り換え操作を改善する。
【解決手段】 車両の走行駆動源による駆動力と通常ブレーキ装置による制動力とを制御して、先行車との車間距離を保ちながら追従走行制御を行う追従走行制御装置において、追従走行制御中に停車状態が検出され、駐車ブレーキ装置を制御して作動させている状態(停止保持制御状態)において、追従走行制御を解除するための解除操作部材に対して追従走行制御を解除する操作と異なる所定の操作が行われた場合には、追従走行制御を解除して駐車ブレーキ装置を非作動とした状態(制御解除状態)へ切り換える。
(もっと読む)
車両の制御装置
【課題】 衝突予知の誤判断によって乗員が違和感を受けるのを防止しつつ、衝突時にブレーキ装置を適正に作動させることができるようにする。
【解決手段】 自車両の前方に存在する前方物体と自車両との距離および相対速度を検出する前方物体検出手段9と、この前方物体検出手段9の検出結果に基づいて上記前方物体と自車両とが衝突する状態にあることが予知されたときに、衝突が発生すると予知された衝突予知時点よりも前にブレーキ装置5を作動させる制御を実行する衝突予知制御手段2と、自車両の走行速度を検出する車速検出手段(車速センサ6)と、この車速検出手段により検出された自車両の走行速度が大きい場合には走行速度が小さい場合に比べてブレーキ装置の作動タイミングを遅らせるように上記ブレーキ装置5の制御条件を補正する制御条件補正手段3とを設けた。
(もっと読む)
車両の制御装置
【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
車両の加速度算出装置及び車両の走行制御装置
【課題】 加速度算出値に含まれるノイズを抑制できると同時に、フィルタ処理を行う際に応答遅れが大きくならないようにした、車両の加速度算出装置及びこれを用いた、車両の走行制御装置を提供する。
【解決手段】 車両の車速情報を検出する車速検出手段100と、該車速検出手段によって検出された該車速情報を時間微分することにより予め設定された演算周期毎に該車両の車速微分値を加速度情報として算出する車速微分値算出手段107とをそなえ、該車速微分値算出手段107は、演算周期nにおいて入力された該車速情報と所定周期数r(例えば、r=15)だけ前の演算周期(n−r)において入力された該車速情報とに基づいて、該加速度情報を算出する。
(もっと読む)
運転装置の制御装置
【課題】運転者の能力等に合わせて操作装置の操作性を調整でき、車両の運転を容易化することが可能な運転装置の制御装置を提供する。
【解決手段】操作レバー20を含み操作レバー20の操作位置を出力する操作装置10と、車両のブレーキ及びアクセルを動作させる駆動系60,70とを備える運転装置において、操作位置に応じて駆動系60,70の制御量を決定し制御する制御装置50であって、操作位置と駆動系60,70の制御量との関係を変更可能に形成されている。この構成によれば、ユーザの能力、好みや車両の状況に合わせて操作装置10の操作性を調整できる。
(もっと読む)
車両の走行補助装置
【課題】 運転者におけるハンドル把持の程度に応じてACCシステムによる加速制御を規制することにより運転者における違和感の発生を抑制して円滑なオートクルーズ制御を実行し得る車両の走行補助装置を提供する。
【解決手段】 車両を加減速させることにより、自車両を予め設定された目標車速となるように走行させる定速制御、および自車両の前方に存在する先行車両との車間距離を予め設定された目標車間距離となるように走行させる追従制御の少なくともいずれか一方の制御を行うオートクルーズ制御手段と、運転者が適正な保持力でハンドルを把持していないことを検出する不適正把持検出手段と、上記オートクルーズ制御手段による制御中に、この不適正把持検出手段からの検出結果に基づいて運転者が適正にハンドルを把持していないことを検出した場合に、上記オートクルーズ制御手段による加速制御を規制する自動加速規制手段とを備える。
(もっと読む)
1 - 20 / 50
[ Back to top ]