
Fターム[3D044AE15]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御部の特徴 (590) | 信号の処理、手段 (524) | 記憶、保持 (21)
Fターム[3D044AE15]に分類される特許
1 - 20 / 21
車両のクルーズコントロール装置
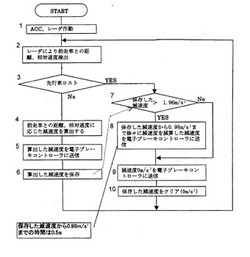
【課題】先行車ロスト時における減速度に応じて速やかに制動を解除できる車両のクルーズコントロール装置を提供する。
【解決手段】アダプティブクルーズコントローラは、追従する先行車が自車の前方からいなくなる先行車ロスト時を判定する先行車ロスト時判定手段(ステップ3)と、先行車ロスト時における減速度が所定値(1.96m/s2)より高い場合に減速度を所定の低速モードで減少させる低速モード制動解除手段(ステップ7,8,9)と、先行車ロスト時における減速度が所定値(1.96m/s2)以下の場合に減速度を所定の高速モードで減少させる高速モード制動解除手段(ステップ7,9)とを備え、低速モード制動解除手段は高速モード制動解除手段より減速度を減少させる速度が低い領域を持つ構成とする。
(もっと読む)
車両の制御装置及び車両制御用情報の車両間相互利用システム

【課題】メモリに記憶している環境情報がクリアされてしまった場合でも、環境情報を用いた車両の制御を高い制御精度で継続して行えるようにする。
【解決手段】記憶手段12Aの記憶内容がクリアされた場合、車車間通信手段16Aによって自車両2Aを基準とする所定エリア内の他車両2Bに対し、他車両2Bが有する環境情報の送信を要求する。そして、他車両2Bから送信された環境情報を取得し、自車両2Aに関する環境情報として記憶手段12Aに記録する。
(もっと読む)
車両用表示装置
【課題】燃費を向上させるための車両の運転操作をより適切に支援することができる車両用表示装置を提供する。
【解決手段】アクセル開度センサ16は、操作者によるアクセルペダル12の操作量(アクセル操作量)Aを検出する。操作量変化率算出部18は、アクセル開度センサ16により検出されたアクセル操作量Aに基づいて、アクセル操作量Aの時間変化率(瞬間時間変化率)dA/dtを所定時間Δt1おきに算出する。表示装置24は、操作量変化率算出部18で算出されたアクセル操作量Aの時間変化率dA/dtを示す情報を表示する。
(もっと読む)
車両の走行制御装置
【課題】車両の実走行速度を目標速度に一致させるように実走行速度調節手段を制御する制御手段を備えた車両の走行制御装置において、目標速度変更スイッチにより目標速度の変更を行う場合に、目標速度がいくらに変更されたかを車両の乗員が把握し易くする。
【解決手段】乗員によるセットスイッチの操作後における目標速度変更スイッチの2回目以降の操作時には、目標速度を、目標速度変更スイッチの1回の操作毎に一定の速度だけアップ又はダウンさせる(ステップS8)一方、上記セットスイッチの操作後における目標速度変更スイッチの1回目の操作時には、目標速度を一定の速度以下の速度だけアップ又はダウンさせる(ステップS4)。
(もっと読む)
車両の走行制御装置
【課題】
本発明は、追従走行制御が実行可能な車両の走行制御装置において、目標車間距離を設定する際に、運転者が前方の先行車両に対して違和感を感じることを回避することが可能な走行制御装置を提供することを課題とする。
【解決手段】
CCDカメラ7により自車両Aの前方に先行車両Bの存在が検知された場合は、自車両Aと先行車両Bとの実際の車間距離をレーダ8で計測して、該車間距離を設定車速の値で割って車間時間を算出し、制御ユニット50が予め記憶している「長」、「中」、「短」の3段階の目標車間時間の中から最も実際の車間距離と近い目標車間時間を設定して、車間時間を目標車間時間に維持した上で自車両Aを先行車両Bに対して追従走行させ、前方に先行車両Bの存在が検知されない場合は、目標車間時間を「長」に設定して自車両Aを追従走行させる。
(もっと読む)
燃料供給システムの制御装置
【課題】燃料供給ポンプの特性ずれを好適に反映して当該ポンプの燃料吐出量を精度良く制御し、ひいては排気エミッションやドライバビリティの改善を図る。
【解決手段】コモンレール12にはエンジン10に噴射供給するための高圧燃料が蓄圧されており、エンジン10の動力により高圧ポンプ13が駆動されることによりコモンレール12に燃料が圧送される。ECU20は、エンジンのアイドル運転状態で高圧ポンプ13の特性ずれ量を算出するとともに、クルーズ走行状態で高圧ポンプ13の特性ずれ量を算出する。そして、これら2点の特性ずれ量を反映して高圧ポンプ13の燃料吐出量を制御する。
(もっと読む)
制動操作矯正装置
【課題】後続の車両の追突可能性や同乗者の不安を低減するために、運転者の制動操作の癖を矯正する。
【解決手段】運転者の制動操作を検知する制動操作検知手段1、2と、制動操作検知手段1、2で検知された制動操作を予め設定された制動操作モデルと比較してその制動操作モデルに対する乖離度合いを判定する乖離度合判定手段と、その乖離度合判定手段で判定された乖離度合いを記憶する乖離度合記憶手段と、その乖離度合記憶手段に記憶された乖離度合いの履歴に基づいて運転者の制動操作が適切か否かを判定する制動操作判定手段と、その制動操作判定手段で運転者の制動操作が適切でなく癖があると判定されたときに運転者に制動支援を行なう制動支援手段6とを設け、その制動支援により運転者の制動操作の癖を矯正する。
(もっと読む)
車両用計器
【課題】 プッシュボタンスタートシステムを有する車両に搭載される車両用計器において、その照明機能が、スタータボタンが押された後、車両用計器の照明が点灯し、その後、突然消灯し、再び、点灯するという違和感のあるものとならないようにする。
【解決手段】 車両の各種情報を表示する文字盤7、指針8と、文字盤7および指針8を照明する照明装置9と、照明装置9の点灯および消灯を制御するメータECU6とを備える車両用計器において、プッシュボタンスタートシステムにより、イグニッションスイッチがオンとなった後、自動的に、スタータが作動して、エンジンが始動する場合では、電源ECU5から入力されるIGがONである信号と、エンジンECU4から入力されるスタータがONである信号と、スタータがOFFである信号とに基づいて、照明装置9の点灯を開始する制御を、メータECU6に実行させる。
(もっと読む)
車両用表示装置
【課題】 車両前方の視認性が悪い環境下においても前記車両前方の状況に関する情報を表示可能な車両用表示装置を提供する。
【解決手段】 車両用表示装置において、制御手段15は、撮像手段10が撮像した前記車両前方の道路上に位置する障害物を示す障害物画像と前記障害物を撮像した際の前記車両の位置情報あるいは前記障害物の位置情報とを記憶手段15dに記憶させ、前記車両前方の視認性が悪いと判定される場合に、記憶手段15dに記憶される前記車両の位置情報あるいは前記障害物の位置情報に基づいて、道路形状画像と記憶手段15dに記憶される前記障害物画像とを重ね合わせて表示手段1に表示させる。
(もっと読む)
車両用走行抵抗監視装置
【課題】 本発明は、運転者に対し走行抵抗を抑制するように促す車両用走行抵抗監視装置の提供を目的とする。
【解決手段】 車両に発生する走行抵抗を算出する算出手段と、前記算出手段により算出された走行抵抗を前記車両が走行した区間毎に記憶する記憶手段と、前記算出手段により算出された今回の走行抵抗と前記記憶手段に記憶された過去の走行抵抗とを同一の走行区間同士や同一の走行環境条件(天候等)同士で比較する比較手段と、前記比較手段による比較結果を前記車両の運転者に報知する報知手段とを備えることを特徴とする車両用走行抵抗監視装置。
(もっと読む)
車両の速度制限装置
【課題】 運転者が制限速度を守らずに運転しようとしたり、制限速度の変化に気づかなかった場合等でも、車両の走行速度を制限速度以下に制御する。
【解決手段】 自車両が走行する場所の制限速度を取得する制限速度取得手段2、3、4と、制限速度取得手段が取得した制限速度以下になるように、自車両の走行速度を制限する速度制限手段7とを備える速度制限装置1。市販されている自動車等の車両が走行可能な最高速度を、速度制限装置1によって、自車両が走行する場所の制限速度以下になるように制御する。制限速度取得手段は、自車両の現在位置を検出する自車両位置検出部3と、自車両が走行する道路データを記憶した道路データ記憶部4と、自車両の現在位置に対応する道路データから制限速度を取得する制御部5とを備える。速度制限手段は、自車両のエンジン制御系に制限信号を発して走行速度を制限する。
(もっと読む)
走行支援情報表示装置
【課題】 コーナ手前の必要減速度のレベルをドライバが容易に把握できるようにすること。
【解決手段】 コーナにおける走行支援のための情報表示を行う走行支援情報表示装置であって、車両の現在位置情報と所与の地図情報とに基づいて、進行方向前方のコーナを検出するコーナ検出手段と、該コーナの形状に関するコーナ情報を取得するコーナ情報取得手段と、該コーナ情報に基づいて、該コーナを安全に走行するための基準走行速度を算出し、現時点までの車両の走行態様に基づいて、該コーナに前記基準走行速度で進入するために必要な減速度を算出する必要減速度算出手段と、前記必要減速度を表す表示を視認可能に出力する表示出力手段とを備える。
(もっと読む)
車両の走行安全装置
【課題】 進行方向および通過中のカーブに対して適切に安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の加速意志が検出されないときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態で運転意志検出部65により加速意志が検出されたときには所定期間を延長することを終了する。作動部64は、安全装置の作動時にヨーレートまたは横加速度の少なくとも何れかが増加傾向に変化することが検出されたときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態でヨーレートまたは横加速度が増加傾向に変化しないことが検出されたときには所定期間を延長することを終了する。
(もっと読む)
車両制御装置
【課題】 進行方向に存在する分岐路に対して自車両が進入する分岐路を推定する際に運転者の意志を適切に反映させる。
【解決手段】 作動部64は、分岐路比較部67での比較結果において、推定分岐路と実分岐路とが一致しない場合には、今回の処理での自車両の走行状態と同等の走行状態に対する分岐路推定部66での次回以降の推定処理において、今回の処理での実分岐路を次回以降の推定分岐路として推定するように分岐路推定部66の処理内容を変更する。
(もっと読む)
速度制御装置及び速度制御装置を備えた車両
【課題】 運転者の生理状態を判断して車両の速度を的確な速度に減速できる速度制御装置及び速度制御装置を備えた車両を提供すること。
【解決手段】 運転者の生体情報を入力する入力手段4と、入力された生体情報からノイズ成分を除去するノイズ除去手段5と、ノイズ成分が除去された生体情報を増幅する増幅手段6とを有する生体情報取得手段2と、生体情報取得手段2が取得した生体情報から生理状態を算出する算出手段7と、算出した生理状態を記憶する記憶手段8と、記憶された生理状態が正常な整理状態か否かを判定する生理状態判定手段9と、車両20の速度を検出する速度検出手段11と、生理状態判定手段9の判定結果と速度検出手段11の検出した速度に基づいて車両20の速度を制御する速度制御判定手段10とを有する速度制御手段3とを備える。
(もっと読む)
表示装置
【課題】 運転者が車両前方の道路の形状を把握し、また、前走車両の接近を瞬時に認識することが可能な表示装置を提供する。
【解決手段】 表示装置(ヘッドアップディスプレイ装置)は、表示手段(表示ユニット)1と、自車両前方の道路の形状を三次元的に示す道路形状画像と前走車両との間の望ましい車間距離を示す車間距離指標とを表示手段1に表示させる制御手段16と、を備えてなる。三次元データからなる地図情報を記憶する地図情報記憶手段(記憶媒体)14と、前記自車両の現在位置を検出する位置検出手段(GPS電波受信部)11と、を備え、制御手段16は、位置検出手段11により検出された前記自車両の現在位置に基づいて前記地図情報を読み出して表示手段1に前記道路形状画像を表示させてなる。
(もっと読む)
車両用表示装置
【課題】 走行中の走路の勾配を容易に認識できる車両用表示装置を提供する。
【解決手段】 記憶媒体に格納された三次元の座標情報からなるデジタルマップデータに基づいて走路形状Rを投影表示する表示器2と、車両Aの現在位置を検出する位置検出手段17と、位置検出手段17により検出された車両Aの現在位置に基づいてデジタルマップデータを読み出して車両Aの前方側の走路形状Rを表示器2に投影表示させる制御手段15と、を備える車両用ヘッドアップディスプレイ装置であって、制御手段15は、表示器2に投影表示させる走路形状Rの高低差を強調して表示させるものである。
(もっと読む)
車両用走行制御装置
【課題】 定速走行を行う車速領域以外の車速領域において先行車追従走行および定速走行における上限車速を設定する。
【解決手段】 先行車追従走行を行う全車速領域を区分して少なくとも低速領域と高速領域を設定し、低速領域では、先行車がいるときは車間距離を保ちながら先行車に追従走行するとともに、先行車がいなくなると先行車追従走行を解除し、高速領域では、先行車がいないときは予め設定した上限車速(設定上限車速)で定速走行するとともに、先行車がいるときは設定上限車速を上限として車間距離を保ちながら先行車に追従走行する車両用走行制御装置において、高速領域以外の車速領域において設定上限車速を設定する。
(もっと読む)
車線逸脱防止装置
【課題】運転者に違和感を与えることなく、車線逸脱防止制御を行える。
【解決手段】方向指示スイッチ20がオフ状態の場合、操舵介入の有無判定(ステップS11)、過去の方向指示スイッチ20の操作の有無判定(ステップS12)、過去の戻し操舵操作の有無判定(ステップS13)及び隣接車線の有無を判定(ステップS14)する。これにより、逸脱傾向があり、かつ直近に方向指示スイッチ20が操作されており、かつ戻し操舵操作されている場合、ヨーモーメントを小さくして車線逸脱防止制御を行う。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両のリスクポテンシャルの変化を運転者にわかりやすく伝える車両用運転操作補助装置を提供する。
【解決手段】
先行車に対する自車両のリスクポテンシャルを算出し、複数の領域から、算出したリスクポテンシャルの領域を判定する。そして、リスクポテンシャルの領域に対応して設定した制御反発力にしたがって、自車両に発生する制駆動力を制御する。リスクポテンシャルが大きな領域ほど制御反発力を大きくする。リスクポテンシャルが領域間を遷移するときは、制御反発力を徐々に変化させ、リスクポテンシャルの大きな領域へ遷移するほど遷移状態における制御反発力の変化量を大きくする。
(もっと読む)
1 - 20 / 21
[ Back to top ]