
Fターム[3D046BB18]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711) | 衝突防止 (357)
Fターム[3D046BB18]に分類される特許
341 - 357 / 357
制駆動力制御装置

【課題】 対象物体との衝突を回避するための制動の立ち上がり、および回避後の駆動の立ち上がりを早くする制駆動力制御装置を提供することを課題とする。
【解決手段】 対象物体との離間距離が縮まっている時であって、離間距離が所定の第1の距離(I)以下且つ所定の第2の距離(II)以上であるときに、第一予備制動力およびこの第一予備制動力を打ち消す第一予備駆動力を、前後輪又は前輪と後輪のいずれかに及ぼす制御をする危険回避準備制御手段を備えることを特徴とする。一方、離間距離が拡がっている時であって、離間距離が所定の第3の距離(III)以上且つ所定の第4の距離(IV)以下であるときに、第二予備駆動力および第二予備駆動力を打ち消す第二予備制動力を、前後輪又は前輪と後輪のいずれかに及ぼす制御をする危険回避終了制御手段を備えることを特徴とする。
(もっと読む)
車両の接触回避制御装置

【課題】 自車両と他車両との接触を回避するべく自車両の走行を支援する際に、適切な走行支援を実行する。
【解決手段】 危険性判定部24は、接触回避制御動作の作動状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して他車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合や、障害物が存在する場合等に、対象物位置・走行軌跡算出部23にて自車両から他車両までの距離の検知が不可になると、対象物走行軌跡算出部21から入力される他車両の走行軌跡と、自車両の走行軌跡とに基づき、他車両の危険度を判定する。
(もっと読む)
「フォークの眼」装置
【課題】フォークリフトのフォークの先端が貨物、物体や人に接触する事故を未然に防止できる装置の提供。
【解決手段】自動距離測定装置を用いてセンサーから前方の物体までの距離(N)を測定し、演算装置に予め設定した距離(L+A)より物体までの距離(N)が小さくなった時に、フォークリフト本体やフォークの前進機能を制御(制動)する事により、物体(人を含む)との接触事故を未然に防止する。また、フォークの根本から物体までの仰角θ3を持つ距離(N1)を測定する事により、水平距離N1×COSθ3=Zを求めることが出来る。物体の長さ(V)−Z=Bとなり、演算装置に距離(B)と距離(V)を入力しておき、指定点(Z)で本体やリーチの前進を停止することにより、フォークの先端が物体より先に飛び出す事を防止出来る為、物体2に接触し、破損することを防止出来る。このときV≧Bでなければ、フォークの先端は飛び出してしまう。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
運転操作補助システムを継続して使用するときでも確実に情報の伝達を行える車両用運転操作補助装置を提供する。
【解決手段】
自車両と先行車との接触の可能性が高い場合は、接触可能性を低下するように制駆動力制御とアクセルペダル反力制御を行う。システムによる制駆動力制御が継続的に行われている場合、運転者は継続的に減速感を感じるので、接触可能性の報知としての減速度の変化を感知できなくなってしまう。制動制御を開始する前には、ブレーキアクチュエータをスタンバイ状態にしてブレーキの応答性を高めているが、制駆動力制御が継続的に行われている場合はスタンバイ状態を解除する。これにより、実際に制動力が発生するタイミングを遅くして運転者に刺激を与える。
(もっと読む)
車両の自動非常制動プロセスを起動する方法及び装置
本発明は、車両の、特に大型輸送車の、自動非常制動プロセスを起動する方法及び装置に関する。これにより、車両が前方走行車両に衝突するのを回避するための、又は衝突が避けられない場合の事故を回避するための、支援機能が提供される。予め定められた警告条件(62)が満たされると、運転者に対する警告が起動される。警告条件(62)が満たされるということは、車両が前方走行車両と衝突するのを防ぐために、予設定された警告時間(tw=toa+th)後の、車両の瞬間運転状況により、自動非常制動プロセスが起動されるということを示している。瞬間運転状況は、少なくとも、車両の検出された加速度(a)、及び/又は車両と前方走行車両との間の、検出された相対加速度(arel)から得られる。  (もっと読む)
(もっと読む)
車輌用走行制御装置
【課題】追従走行制御に於いて、先行車輌の停止に伴い自車を停止させる際に自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりすることを防止する。
【解決手段】先行車輌が停止していない場合(S100)及び先行車輌が停止していても自車が停止するまでの予測時間Taが基準値Taoよりも大きいときには(S140)、車間距離制御が実行され、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御されるが(S170)、予測時間Taが基準値Tao以下になると運転者に対し制駆動操作を催促する報知が発せられた状態で車間距離制御が実行され(S150、170)、運転者は自らの判断により制駆動操作を行うことにより自車を所望の位置に停止させることができ(S20、210)、自車が停止不可区域にて停止する虞れがあるときにも報知が発せられる(S80、150)。
(もっと読む)
車輛の液圧式ブレーキシステム用の制動力発生器
【課題】 車輛の液圧ブレーキシステム用の制動力発生器(10)を提供する。
【解決手段】 車輛の液圧ブレーキシステム用の制動力発生器(10)は、ブレーキペダル(P)に連結できる又は連結された、制動力発生器(10)のベースハウジング内で変位自在の力入力エレメント(14)、液圧制動圧力を発生するため、一次ピストン(64)が移動自在に案内されるマスターシリンダ、力入力エレメント(14)に連結できるペダル反力シミュレート装置(106)、ペダルの作動を検出するためのペダル作動検出装置(150)、及び作動力を一次ピストン(64)に及ぼすための作動力発生装置を含む。作動力発生装置は、制御弁(22)、チャンバ装置(16)、及び電磁アクチュエータ(48)を含み、チャンバ装置(16)は、真空チャンバ(30)及びこの真空チャンバ(30)から移動自在の壁(28)によって分離されており且つ制御バルブ(22)によって真空チャンバ(30)に流体的に連結できる作用チャンバ(32)を持つように設計されており、制御弁(22)は、検出されたペダルの作動に従って作動できる。
(もっと読む)
停止距離の短縮方法
本発明は車両(2)の停車距離を低減させるための方法に関し、これにより、特定の事象が発生するとブレーキが準備され、運転支援システムにとって想定外の運転状況が発生すると、前記ブレーキ操作が準備される。したがって走行安全性を高めることができる。  (もっと読む)
(もっと読む)
自動車の運転者への警告方法および警告装置
自動車の運転者への警告方法および装置が提案され,この場合,対象検出器が設けられて,前を走行する車両を検出して,自己の車両に対する間隔と相対速度を求めて評価装置へ供給する。評価装置(1)は,前を走行する車両(13)が減速(a1<0)を実施すると仮定して,さらに対象検出器によって検出された変量と運転者の反応時間および自己の最大可能な車両減速にしたがって,前を走行する車両との衝突が回避できるかを求める。衝突が回避できないことが認識された場合に,運転者警告装置が活性化される。 (もっと読む)
追突防止装置
【課題】前車との追突の可能性が高い危険状態を検知した場合、すぐにブレーキを動作させ追突の可能性を抑制できる追突防止装置を提供すること。
【解決手段】本発明に係る追突防止装置は、パニックブレーキを検知する検知手段と、前記パニックブレーキ検知手段がパニックブレーキであることを検知した場合に、LEDを用いてパニックブレーキ信号を送信するパニックブレーキ信号の送信手段と、前記信号の受信してブレーキを制御するパニックブレーキ信号の受信手段とを備えることによって、人間が前車両との危険を察知してブレーキを踏むよりも早く、確実にブレーキを動作させることができ、効果的に追突事故を抑制することができる。
(もっと読む)
自動車において障害物までの距離を検出する装置及び方法
本発明は、距離センサ(1〜6)及び制御ユニット(10)を有する、障害物(8、8’)からの自動車(7)の距離(A)を検出する装置(15)に関する。本発明の装置は、制御ユニット(10)が動的車両データを使用して自動車(7)がもうすぐ至る運転経路(11)の計算に適合されることを特徴とする。制御ユニット(10)はまた運転経路(11)内にある関係のある障害物(8’)と運転経路(11)の外部にある無関係な障害物(8)とを区別するのに適している。本発明はまた障害物(8、8’)からの自動車(7)の距離(A)を検出する方法に関する。
 (もっと読む)
(もっと読む)
プリセーフシステムを装備した自動車
本発明は、自動車の少なくとも1つの周囲認識装置(4)及び運転状況データ検出装置(5)によって受信された情報に従って作動されるアクティブ及び/又はパッシブセーフティ装置(13、14)を備え、前記情報はデータ評価装置(10)によって分析される、プリセーフシステム(2)を装備した自動車(1)に関する。アクティブ及び/又はパッシブセーフティ装置(13、14)の少なくとも1つの要素は、自動車の周囲認識装置(4)の情報が潜在的な衝突物を示すと、及び運転状況データ入力装置(5)が衝突が妥当であると判断すると作動される。  (もっと読む)
(もっと読む)
自動車用運転支援システム
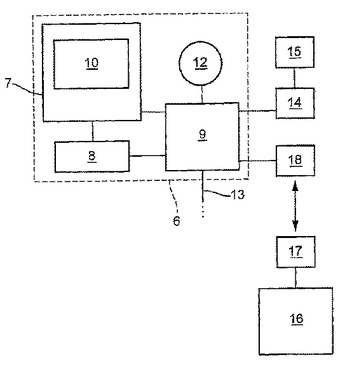
本発明は、少なくとも1つの駆動ユニットと、1つのステアリング装置と、1つのブレーキ装置とを有する、電子制御式駆動伝達系を備えた、自動車、特に多用途車に関する。自動車の運転を簡素化するために、表示装置(7)と、入力装置(8)と、制御システム(9)とを備えた運転支援システム(6)が設けられる。表示装置(7)は、車両の実際の向き及び実際の位置、及び車両の比較的近い周囲状況を、モニタ(10)に表示するよう適合される。入力装置(8)は、車両の所望の向き及び所望の位置を入力するよう適合される。制御システム(9)は、運転アルゴリズム(12)を処理するように適合され、駆動伝達系を作動させて、車両の周囲状況を考慮しつつ、車両をその実際の向き及び実際の位置からその所望の向き及び所望の位置に移動する。
 (もっと読む)
(もっと読む)
緊急制動プロセス中に車両の運転者を支援する方法及び装置
本発明は、車両が、その走行方向の前方の検出領域内に位置する物体、特に先行車両との衝突を防止するために、緊急制動中に車両の運転者を支援する方法及び装置に関する。本発明の方法によれば、所定の緊急制動条件が満たされた場合に、また運転者が緊急制動プロセスを行おうとしていることが検出された場合に、車両(50)を減速するために設けられる制動手段が、運転者とは独立して起動され、緊急制動条件が満たされた場合に、緊急制動情報が車両(50)の運転者に伝達される。本発明によれば、緊急制動条件が満たされないときでも、検出領域(54)における現在の周囲状況又は交通状況に関する情報を車両(50)の運転者に通知する情報が伝達され、予め規定された情報条件が満たされた場合に、運転者への前記情報が調整される。  (もっと読む)
(もっと読む)
ブレーキシステムへの介入による自動車の縦ガイド装置
ブレーキ要請信号をブレーキ制御装置(12)へ出力する運転者アシストシステム(10)を備えた,自動車の縦ガイド装置は,運転者アシストシステム(10)が,ブレーキ要請信号を,その内部で車両が予め定められた目標速度(vz)に達するために車両が移動すべき距離を表す,距離信号(s_soll)の形式で出力するように形成されており,かつブレーキ制御装置(12)が,距離信号をブレーキ操作信号(Pi)に換算するための換算ユニット(20)を有していることを特徴としている。 (もっと読む)
車両の急減速装置
特に非常ブレーキ状況のための,車両を急減速させる装置が提案され,この場合,減速装置の少なくとも1つのコンポーネントに作用する,少なくとも1つの発射薬または爆破薬の爆発によって減速される。発射薬または爆破薬の爆発によって,ブレーキフルードに圧力を供給するピストンが移動され,あるいは固定装置が破壊されるので,エネルギを蓄える装置に蓄えられたエネルギを解放することができる。この装置の作動は,車両の周囲の対象とその動作に基づいて,避けられない衝突の存在が検出された場合に,環境センサ技術によって自動的に行われる。 (もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
341 - 357 / 357
[ Back to top ]