
Fターム[3D046BB18]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711) | 衝突防止 (357)
Fターム[3D046BB18]に分類される特許
141 - 160 / 357
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
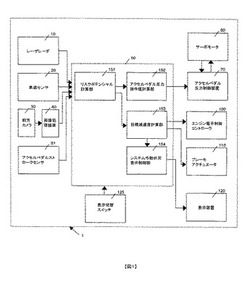
【課題】システムの作動状況を視覚情報として伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両周囲の障害物状況に基づいて障害物に対するリスクポテンシャルを算出する。リスクポテンシャルに基づいてアクセルペダルに発生させる操作反力の反力増加量を算出するとともに、制駆動力制御を行うための目標減速度を算出し、リスクポテンシャルに応じた操作反力制御および制駆動力制御を行う。アクセルペダル反力増加量および目標減速度を表示装置のX軸およびY軸にそれぞれ設定し、車両用運転操作補助装置の作動状況を表すアイコンを表示する。リスクポテンシャルの大きさに応じてアイコンの大きさを変更する。
(もっと読む)
車両の障害物検知装置

【課題】障害物が一時的に消滅したときに車両の作動機器が誤って作動するのを防いで運転時の煩わしさをなくして安全且つスムーズに運転を行えるようにする。
【解決手段】自車両1の前方の障害物を検知するミリ波レーダ3(障害物検知手段)と、このミリ波レーダ3による障害物の検知状態に応じて車両の作動機器(ブレーキ手段14,警報装置13やシートベルトプリテンショナ15)を制御する制御ユニット10(作動制御手段)とを設ける。ミリ波レーダ3によって検出されていた障害物が検出されなくなったときに、この障害物の位置を推定する障害物位置推定手段24を設ける。この障害物位置推定手段24が作動しているときには、推定された障害物による制御ユニット10の制御を停止する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】触覚情報に加えて視覚情報を用いてリスクポテンシャルを運転者に伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との接近度合を表すリスクポテンシャルに応じた操作反力を発生するようにアクセルペダル操作反力制御を行う。このとき、自車両前方に存在するどの障害物を対象としてリスクポテンシャルを算出し、反力制御を行っているかをわかりやすく運転者に伝えるために、HUDの先行車に対応する位置に参照枠を表示する。参照枠の大きさ、表示色、および輝度をリスクポテンシャルに応じて設定する。
(もっと読む)
車両の障害物検知装置
【課題】車検等のテスト時にシャシーローラー上で車両を走行させている際、車両の作動機器が作動するのを防いでテストを正常に行えるようにする。
【解決手段】自車両1の前方の障害物50を検知するミリ波レーダ3(障害物検知手段)と、ミリ波レーダ3による障害物50の検知状態に応じて車両の作動機器を制御する制御ユニット10(作動制御手段)とを設ける。ミリ波レーダ3によって検知された障害物50が自車両1に対して相対的に移動しているか否かを判断する障害物移動判定手段31と、障害物移動判定手段31によって自車両1に対して相対的に移動する障害物50が検知されなくなってから所定時間をカウントするタイマ手段33と、車両の障害物検知装置2全体の機能を停止するシステム停止手段34とを設ける。タイマ手段33によって所定時間カウントされたときに、システム停止手段34によってシステム全体を停止する。
(もっと読む)
車両の障害物検知装置
【課題】乗員の運転操作で回避しうる領域の障害物を車両の作動機器の制御の対象から除外して運転時の煩わしさをなくして安全且つスムーズに運転を行えるようにする。
【解決手段】ミリ波レーダ3(障害物検知手段)によって、自車両1の前方の障害物50を検知する。ミリ波レーダ3による障害物検知領域A1〜A4を、自車両1の前端部から所定距離前方に向けて設定し、その先端部を中央部分から後側方に向けて斜めにカットする。この障害物検知領域A1〜A4に障害物50が侵入したときに、制御ユニット(作動制御手段)によって車両の作動機器(警報装置、ブレーキ手段、シートベルトプリテンショナ等)を作動させる。
(もっと読む)
自動制動制御装置
【課題】 衝突による被害を低く抑える。
【解決手段】 走行中における障害物との衝突を検出し、衝突が検出されたときには自車を制動する。例えば、最大の制動力または制動減速度により自車速が無くなるまで自車を制動する。複数の衝突検出センサを備えることにより、衝突の衝撃によって、センサの一部が破損した場合でも衝突を確実に検出する。衝突時の衝撃を緩和する自動制動制御装置と併用してもよい。
(もっと読む)
車両用ブレーキ制御装置
【課題】自動制動中あるいはブレーキアシスト中にブレーキペダル操作が行われた場合にも、滑らかなブレーキフィーリングを確保する。
【解決手段】マスタピストン11の前方に圧力室MCを形成すると共に後方に助勢室ACを形成し、ブレーキペダル1の操作に応じて圧力室からマスタシリンダ液圧を出力するマスタシリンダ10と、ブレーキペダルの操作とは独立してパワー液圧を出力する液圧源20を備える。更に、パワー液圧をマスタピストンに連動してレギュレータ室RC内に導入しレギュレータ液圧に調圧する調圧弁手段30と、圧力室に連通接続する一系統のホイールシリンダ(41及び42)を備える。そして、第1の制御弁(50)を介して液圧源を助勢室に接続し、増圧制御する。また、切換弁手段(60)を介してレギュレータ室を助勢室に接続し、助勢室に第2の制御弁(70)を接続して減圧制御する。
(もっと読む)
車両用自動制動装置
【課題】車両が障害物に対しオフセット衝突しつつある場合の乗員が受ける被害を軽減し、車両の回頭性をむやみに高めて操縦安定性を悪化させることなく運転者の操舵回避行動に余裕を与えることのできる車両用自動制動装置を提供する。
【解決手段】衝突判定処理部108の判定結果と操舵回避判定処理部109の判定結果に基づいて、自車が障害物に対して衝突する危険性が高いにもかかわらず、運転者の操舵回避行動が未だとられていない運転者が無意識の状況下において、走行経路曲線に対する障害物の横位置が大きい時には正面衝突する方向に車両に回頭性を付与するブレーキ力制御処理部110を備えているため、車両の速度を低減させると共に、衝突時に乗員が受ける被害を軽減することができる。
(もっと読む)
車両制御装置及び車両管制装置
【課題】交差点における車両の走行支援を適切に行うこと。
【解決手段】車両制御装置は、車両の方向指示操作に基づいて、交差点における車両の進行方向を判断し、その判断に基づいて、交差点を通過する車両の減速度を制御する。また、車両制御装置は、交差点への車両の接近を検出する接近検出手段と、接近検出手段により交差点への車両の接近が検出されたとき、車両の運転者に対して、方向指示操作を要求する操作要求手段と、を備えている。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行う。例えば、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる。また、自車速が所定値以下であり、操舵角あるいはヨーレイトのとる値が所定範囲外であるときには、段階的制動制御の起動を禁止する。さらに、変速制御による自動制動制御への影響を除去する。あるいは、変速制御により自動制動制御を援助する。
(もっと読む)
自動制動制御装置
【課題】 トラックやバスにおける自動制動制御を実現する。
【解決手段】 対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行い、この段階的な制動制御は、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる制動制御であり、各段階の制動力または制動減速度の立ち上がり点から所期の制動力または制動減速度に達するまでの区間における制動力または制動減速度の変化率を所定の値とする。または、各段階の制動力または制動減速度の立ち上がり点から所期の制動力または制動減速度に達するまでの区間における制動力または制動減速度の変化過程を所定の関数により定義される曲線形状に沿った変化過程とする。
(もっと読む)
車輌の走行制御装置
【課題】運転者により急制動操作及び操舵操作が行われたときにも運転者の急制動要求を満たしつつできるだけ運転者の希望通りに車輌を旋回させ得るようにする。
【解決手段】ブレーキアシスト制御が実行され(S220)、運転者による緊急回避操舵の可能性があると判別されると(S240)、マスタシリンダ圧力の増大率ΔPmが大きいほど大きくなるよう運転者による緊急回避操舵の可能性の指標値Ksが演算され(S270)、指標値Ksが大きいほど小さくなるよう前輪の目標ロール剛性配分比Rsftが演算され(S300)、前輪の目標ロール剛性配分比Rsftに基づきアクティブスタビライザ装置16及び18が制御されることにより(S310)、緊急回避操舵の可能性が高いほどロール剛性の前後輪配分比が後輪寄りに制御され、車輌のステア特性がオーバーステア側へ変化される。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行う。例えば、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる。また、自車速が所定値以下であり、操舵角あるいはヨーレイトのとる値が所定範囲外であるときには、段階的制動制御の起動を禁止する。さらに、急制動時の前輪の右側偏向を抑制する。
(もっと読む)
車両の障害物検知装置
【課題】乗員による車両の所定の運転操作状態が検知された場合に、障害物の誤検出を防いで安全且つスムーズに運転を行えるようにする。
【解決手段】ミリ波レーダ3(障害物検知手段)によって、自車両の前方の障害物を検知する。運転操作状態検知手段5によって、乗員による車両の所定の運転操作状態を検知し、得られた検知結果から作動タイミング切換手段12によって作動機器の作動タイミングを切り換える。この作動タイミングで制御ユニット10(作動制御手段)によって車両の作動機器(警報装置13、ブレーキ手段14、シートベルトプリテンショナ15)を作動させる。
(もっと読む)
交差点管制システム及び装置
【課題】歩行者の安全とスムーズな交差点通過に配慮しつつ、車両が交差点を安全且つ必要最低限の減速でスムーズに通過できるようにする交差点管制システム及び装置を提供すること。
【解決手段】車両用信号機が設置されていない道路交差点に配設され、交差点交通を管制する交差点管制システムが、交差点に配設された歩行者用信号機と、交差点を通過する車両に搭載された車両減速制御装置とを含み、交差点において車両と交錯可能性を有する車両又は歩行者が検出されたときに、これら交錯可能性を有する移動体に交差点通過に関する優先度を設定し、優先度の高い順に当該交差点を通過するように、歩行者用信号機の表示色を制御する又は車両減速制御装置に車両減速制御を実行させる。優先度は原則として緊急車両>歩行者>一般車両とするが、歩行者が連続する場合には一時的に一般車両が優先される時間帯を設け、車両の滞留を回避する。
(もっと読む)
交差点管制システム及び装置
【課題】車両が交差点を安全且つ必要最低限の減速でスムーズに通過できるようにする交差点管制システム及び装置を提供すること。
【解決手段】車両用信号機が設置されていない道路交差点に配設され、交差点交通を管制する交差点管制システムが、交差点から所定の距離範囲内に進入した車両を検出する車両検出装置と、交差点を通過する車両に搭載された車両減速制御装置とを含み、進入が検出された各車両から位置情報及び車両状態情報を取得し、各車両の交錯可能性を判定し、交錯可能性を有する各車両に対して、位置情報及び車両状態情報に基づいて優先度を設定し、交錯可能性を有する車両が優先度の高い順に交差点を通過するように車両減速制御装置に減速制御を実行させる。交錯可能性を有する車両のいずれかの車両から減速制御ができない車両状態であることを示す車両状態情報が取得されたときには、当該車両の優先度を最も高く設定する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】制駆動力制御の作動状態を視覚情報として伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両周囲の障害物状況に基づいて障害物に対するリスクポテンシャルを算出する。リスクポテンシャルに基づいてアクセルペダルに発生させる操作反力の反力指令値を算出するとともに、制駆動力制御を行うための目標減速度を算出する。目標減速度が表示しきい値よりも大きい場合は、目標減速度の表示を点灯するように設定する。これにより、リスクポテンシャルに応じた操作反力制御および制駆動力制御が行われるとともに、制駆動力制御の作動状態を示す表示が行われる。
(もっと読む)
狭いところを通過する前および/または通過する際の運転者支援方法および装置
【課題】狭いところ56の2つの境界間の通過走行幅を求め、運転者に狭いところを通過走行する間/前に支援措置が行なうという狭いところを通過走行する際の運転者支援方法を個人化して熟練者には邪魔にならず、未熟者には効果的な支援が行われるようにする。
【解決手段】支援措置は運転者特性もしくは運転者の能力に依存している。
(もっと読む)
障害物検出装置及びこれを含む車両制動システム
【課題】障害物の画像を確認し難い状況であっても、接近した障害物がある場合にはこれを確実に検出できる障害物検出装置を提供する。
【解決手段】車両周辺に探索波を発射して物体からの反射波に基づいて当該物体を検出する第1検出手段2と、車両周辺を撮像した画像に基づいて物体の形状(高さ、幅の情報など)を検出する第2検出手段3と、前記第1検出手段からの第1検出信号と前記第2検出手段からの第2検出信号とに基づいて、車両周辺の物体が障害物であるか否かを判断する障害物判断手段4とを、備えた障害物検出装置であって、前記障害物判断手段4は、前記第1検出信号に前記車両からの距離が所定距離以下である物体を確認した場合には、前記第2検出信号の結果にかかわらず、当該物体を障害物として検出する。
(もっと読む)
警報装置およびその警報装置を備えた走行制御装置
【課題】自車両と対象物体との車間距離が設定距離以下になった場合に警報を発生させる警報装置において、警報によって運転者が感じる違和感を軽減する。
【解決手段】離間傾向が強く相対減速度が大きい場合は運転者は警報タイミングが早いと感じる。それに対して、設定距離Dw が、自車両と対象物体との相対速度と自車両の走行速度とに基づいて決定された第1接近距離Dw1(S53)と、自車両の減速度に基づいて決定された第2接近距離Dw2(S55)と、自車両と対象物体との相対減速度に基づいて決定された第3接近距離Dw3(S56)との和として求められ、第3接近距離Dw3が、相対減速度が大きいほど小さくされる。相対減速度が大きい場合は設定距離Dw が小さくされるのであり、警報が発生させられるタイミングが遅くされ、運転者の違和感を軽減することができる。
(もっと読む)
141 - 160 / 357
[ Back to top ]