
Fターム[3D046GG01]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | 推進装置 (571)
Fターム[3D046GG01]の下位に属するFターム
エンジン出力 (409)
Fターム[3D046GG01]に分類される特許
1 - 20 / 162
電動車両の停止制御方法
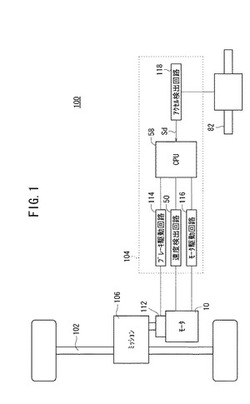
【課題】廉価なホールICを用いて、しかも、誤差成分の影響を最小にして高精度に電動車両の停止制御を行うようにする。
【解決手段】電動車両100は、操作レバー82と、車軸102と、操作レバー82からの操作指示に基づいて回転制御されるモータ10と、モータ10の回転力を車軸に伝達する伝達機構106と、モータ10の回転を制動するための電磁ブレーキ108と、モータ10の回転に伴って生成される一連のパルス信号に基づいてモータ10の回転速度を検出する速度検出回路50を有する。そして、操作レバー82からの操作指示がモータ10の回転停止を示し、且つ、モータ10の回転が電子制御ユニット104によって減速制御される時点から、速度検出回路50からのパルス信号の2回の立ち下がりを経過した時点を、モータ10の回転を電磁ブレーキ108によって停止させる契機の基準時点とする。
(もっと読む)
電動車両

【課題】電動車両の降坂走行時において、降坂走行に引き続く平坦路走行あるいは登坂走行で十分な動力性能が発揮できるように考慮した電動発電機の回生発電制御を行なう。
【解決手段】回生制御部110は、回生制動時のモータジェネレータのトルク指令値Tqcom(一般的には負値)を設定する。制動協調制御部150は、運転者のブレーキ踏力BKに基づき車両全体で必要とされるトータル制動力(パワー)を算出するとともに、このトータル制動力の出力についての油圧ブレーキ90およびモータジェネレータ間での分担を制御する。MG−ECU50は、トルク指令値Tqcomに従った回生トルクが発生されるようにモータジェネレータを駆動制御する。回生制御部110は、同一のブレーキ操作に対して、降坂路走行時には平坦路走行時よりも回生トルクの絶対値が小さくなるように制限する。
(もっと読む)
ブレーキ制御装置
【課題】ホイールシリンダ圧の制御性を向上させる。
【解決手段】ブレーキ制御装置20は、複数のホイールシリンダ23をフィードバック制御により共通の制御液圧に制御し得る液圧制御系と、複数のホイールシリンダ23の各々に対応して設けられており、開弁されている場合には対応するホイールシリンダ23に液圧制御系から制御液圧が供給され、閉弁されている場合には対応するホイールシリンダ23に液圧を保持する複数のABS保持弁51〜54と、ABS保持弁51〜54による保持圧よりも低圧に制御液圧が減圧される場合に、制御液圧にまで該保持圧が追従して減圧されるように該保持圧を制御液圧へ解放するリターンチェック弁81〜84と、を備える。液圧制御系は、リターンチェック弁81〜84による減圧がなされるときの制御液圧の応答性への影響を軽減すべく制御液圧の減圧制御の制御ゲインを変更する。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】ブレーキペダルが操作されていなくてもブレーキ力が保持される場合がある車両において、クリープトルクを適切に抑制することにより無駄なエネルギ消費を削減する。
【解決手段】ECUは、クリープトルク反映率を設定するステップ(S108)と、ブレーキがオンされ(S110にてYES)、停車中であると(S112にてYES)、クリープトルク反映率を0に更新するステップ(S114)と、ブレーキがオフされていても(S110にてNO)、ブレーキ油圧が油圧値P(0)より大きいと(S118にてYES)、ブレーキホールド制御中であると判断して(S120)、ブレーキ油圧をパラメータとするマップに基づいて、クリープトルク反映率を低減して更新するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
産業用電気駆動車両の制動装置
【課題】設定や構造が容易で、安全性が高く、回生エネルギーの回収率が高い。
【解決手段】ブレーキペダルにより操作される機械式油圧ブレーキと、走行用モータを制御するインバータ装置と、ブレーキペダルの踏み込み量を検出する踏み込み量検出器の検出信号に基づいてインバータ装置を制御する車両コントローラとを具備し、車両コントローラを、踏み込み量検出器の検出値に基づいてブレーキペダルのオフ位置0から機械制動始点tの間の低速制動域Tは、踏み込み量の増加に対応して漸次増加させる回生制動トルクETにより制動し、機械制動始点tを越える高速制動域OTでは、踏み込み量の増加に対応して漸次増加する機械制動トルクMTと回生制動トルクETとにより制動するように構成した。
(もっと読む)
車両制御装置
【課題】自動走行装置と自動制動装置とを備えた車両において、両装置の調和を図って車両の制御を適切に行うことを可能とする車両制御装置を提供する。
【解決手段】自動駐車装置と、車両後方に障害物を検出した場合に車両を自動制動する自動制動装置とを備える車両を制御する車両制御装置1である。この装置1では、車両後方に障害物を検出した場合(ステップS203)に、衝突までの余裕を示す衝突予測時間TTCを求め(ステップS205)、これが閾値以下である場合には、自動駐車装置の作動を中止する(ステップS206)。一方、衝突予測時間TTCが閾値よりも大きい場合は、自動駐車装置による走行出力を通常出力よりも低減させる(ステップS207)。このとき、障害物の種類に応じて、走行出力の低減のさせ方を変更する。
(もっと読む)
車両の制御装置、制御方法およびその制御方法をコンピュータで実現されるプログラムならびにそのプログラムを記録した記録媒体
【課題】コストの上昇を抑制しつつ、車両の状態に応じて制動時に回生制動により発生する騒音を抑制する。
【解決手段】HV_ECUは、EVスイッチがオンであるか(S100にてYES)、または、EVスイッチがオフであっても(S100にてNO)、位置情報および時刻情報が予め定められた条件を満足すると(S102にてYESかつS104にてYES)、SOCが予め定められた値Aよりも大きいと(S106にてYES)、回生制動カット指令を実行するステップ(S108)と、EVスイッチがオフであって(S100にてNO)、位置情報および時刻情報のうちのいずれかが予め定められた条件を満足しないと(S102にてNOまたはS104にてNO)、回生制動カット解除を実行するステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
自動車用回生制動故障時の回生制動量補正方法
【課題】 故障時の制動量を反映して回生制動量を車両状態によって増減することができ、バッテリー充電戦略に有利であり、燃費向上を可能とする自動車用回生制動故障時の回生制動量補正方法を提供する。
【解決手段】
本発明は、自動車用回生制動故障時の回生制動量補正方法において、回生制動の進入可否を判断する段階と、前記段階で回生制動が進入状態であると判断された場合、走行制御器(以下、HCU)と電子式ブレーキシステム(以下、EBS)が回生制動制御量を記憶する段階と、HCU及びEBSが回生制動関連の故障時に故障診断用制動量を計算する段階と、HCU及びEBSが回生制動関連の故障直前に計算された正常的な回生制御量と故障診断用制動量の差を学習して記憶する段階と、故障診断用制動量に制動学習値(正常と故障の差の値)を補正して回生制御する段階と、HCU及びEBSが各々別々に回生制動制御する段階と、を含むことを特徴とする。
(もっと読む)
車両の制御装置
【課題】 駆動力源と駆動輪との間に備えられた締結要素を極低温下で制御する場合であっても、運転者に違和感を与えることなく制御可能な車両の制御装置を提供すること。
【解決手段】 駆動力源と、前記駆動力源と駆動輪との間に介装された締結要素と、自動的に車輪に制動力を付与する電子制御ブレーキと、を備えた車両の制御装置において、前記締結要素の締結トルクを制御する締結トルク制御手段と、極低温時において前記締結要素の締結トルクを制御する際、前記電子制御ブレーキに指令を出力して車輪に所定の制動力を付与する極低温時制御手段と、を有することとした。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】制御モードの切替に際してホイールシリンダ圧の封じ込めを回避する。
【解決手段】制動中における異常検出時に作動流体の供給経路の分離を伴うバックアップ用のブレーキモードに移行する際に、バックアップ用ブレーキモードで使用される液圧源とホイールシリンダとの間に設けられかつバックアップ用ブレーキモードで開弁されるべき開閉弁が、開弁指令に応じて開弁されるように当該開閉弁の出入口間に作用する差圧を当該作動流体供給経路の分離前に緩和する。
(もっと読む)
車両挙動制御装置
【課題】セルフアライニングトルクとほぼ同じ位相関係にある実路面反力トルクを用いて駆動力制御量を求めることで、初期不安定状態においても適切な駆動力制御が実現され、車両の安定性や旋回性を向上させることができる車両挙動制御装置を得る。
【解決手段】車速を検出する車速検出手段と、操舵角又は実舵角を検出する舵角検出手段と、タイヤと路面の間に発生する実路面反力トルクを検出する実路面反力トルク検出手段と、車速と舵角と舵角に対する路面反力トルクの勾配とから基準路面反力トルクを演算する基準路面反力トルク演算手段を備え、検出した前記実路面反力トルクと前記基準路面反力トルクに基づいて駆動力調整装置の駆動力制御量を決定する。
(もっと読む)
冷却システムおよびそれを備える車両
【課題】インバータの熱的保護を確保しながら車両の登坂性能を向上することができる冷却システムおよびそれを備える車両を提供する。
【解決手段】ブレーキECU140は、車両の状態が予め定められた制御開始条件を満たすとき、ヒルスタートアシスト制御を実行するとともに、車両がヒルホールドの状態であることを指示するフラグFhをオンに設定してHVECU110へ出力する。HVECU110は、温度センサ16からのインバータ温度Tinvが車両駆動用のモータジェネレータMG2の負荷率の制限を開始する制限開始温度以上のとき、あるいは、ブレーキECU140からオン状態に設定されたフラグFhを受けたとき、インバータ装置70を冷却するための冷却水の目標流量を最大流量に設定する。ウォーターポンプ50は目標流量に一致した流量の冷却水を冷媒路54〜58に循環させる。
(もっと読む)
車両のブレーキ装置
【課題】 回生制動および液圧制動が可能な車輪が回生制動を行うときに、液圧制動のみが可能な車輪の制動力の減少を防止する。
【解決手段】 必要な制動力を回生制動および液圧制動で発生する前輪WFL,WFRのブレーキ液圧をモータシリンダ23により発生させ、必要な制動力を液圧制動で発生する後輪WRL,WRRのブレーキ液圧をマスタシリンダ11により発生させるので、前輪WFL,WFRの制動力の一部あるいは全部が回生制動により負担されていてモータシリンダ23が発生するブレーキ液圧が減少している場合でも、モータシリンダ23とは別個に運転者の制動操作により作動するマスタシリンダ11が発生するブレーキ液圧は減少せず、前輪WFL,WFRの回生制動中に後輪WRL,WRRが必要な制動力を発生できなくなる事態を回避することができる。
(もっと読む)
ブレーキ異常検出システム、ブレーキ温度検出システム、およびブレーキ制御システム
【課題】簡易な構成によってブレーキ装置の温度等を検出し、車両の乗員への報知やブレーキ制御等に役立てる。
【解決手段】ブレーキ異常検出システム200Aにおいて、グリース量判定部102は、検出された電気抵抗値を利用してグリースの量が充分か否かを判定する。表示制御部106およびディスプレイ50は、グリースの量が充分でないと判定された場合、車両の乗員にその旨を報知する。車輪速センサ54は、車両の停車を検出する。電気抵抗検出装置48は、車両のブレーキに設けられるブレーキパッドのパッド裏金30と、パッド裏金30とグリースを介して近接して設けられるパッドシム18との間の電気抵抗を検出する。グリース量判定部102は、所定時間を越える車両の停車が検出された場合に、検出された電気抵抗値を利用してグリースの量が充分か否かを判定する。
(もっと読む)
衝突時衝撃軽減装置及び車両
【課題】他車両による後方からの追突時に確実に乗員の安全を確保できる衝突時衝撃軽減装置及びその衝突時衝撃軽減装置を備えた車両を提供すること。
【解決手段】本発明の衝突時衝撃軽減装置及び車両によれば、他車両進行方向取得手段により取得された進行方向と他車両速度取得手段により取得された他車両の速度とに基づいて、他車両の移動可能な範囲が推定されるので、加速手段による加速を適切なタイミングで実行することができる。よって、衝突の際に自車両が他車両から受ける衝突エネルギーを確実に軽減することができるので、乗員の安全を確実に確保できる。
(もっと読む)
エンジンアシスト装置を備えた多軸車両
【課題】エンジンアシスト型の多軸車両において、駆動輪の空転を抑制し加速性能の悪化を防止する。
【解決手段】多数の駆動輪76L,R〜82L,Rの各々が空転しているか否かを判定し、空転していると判定された駆動輪には自動的に制動をかけて空転を抑制する。加えて、アクセル操作が行われたとき、同時に空転していると判定された駆動輪の数を検出して所定の指定数と比較する。同時空転数が所定数より少なければ、エンジン24をアシストする発電電動機22の出力トルクを増やしてエンジン出力トルクを補強させて、駆動輪76L,R〜82L,Rに伝達されるトルクを増大させる。同時空転数が所定数より多ければ、発電電動機22にエンジン24からの出力トルクを吸収させて、駆動輪76L,R〜82L,Rに伝達されるトルクを減少させる。
(もっと読む)
走行装置及び走行装置の制動制御方法
【課題】平行2輪車において、二車輪を直接制動する制動手段を設ける。
【解決手段】本体1と、本体1に同軸上に取り付けられた1対の駆動ユニット2A、2Bと、乗員がつかまるT字型のハンドル3と、本体1の前後の傾き検出装置4と、ブレーキレバー5とを有する。そしてブレーキレバー5の操作情報を検出するブレーキ検出装置6が設けられる。また本体1には、駆動ユニット2A、2Bで検出された本体と車輪との相対角速度と前後傾き検出装置4で検出された角速度とから車両速度を求める車両速度検出装置7と、ブレーキ検出装置6と車両速度検出装置7との出力から目標車両速度を設定する目標速度設定装置8と、車両をその目標角度・目標角速度・目標車両速度に安定に追従するように制御する安定化制御装置9とが設けられる。さらに、駆動ユニット2A、2B内には、パウダーブレーキ10A、10Bがそれぞれ組み込まれている。
(もっと読む)
走行装置
【課題】異なる駆動輪間で駆動力を異ならせる場合に、装置をコンパクトにして、車両への搭載性を向上させること。
【解決手段】この走行装置10は、遊星歯車装置11と、電動機12と、クラッチ13とを備える。遊星歯車装置11は、リングギヤ11R、キャリア11C、及びサンギヤ11Sで構成される。電動機12は、左側後輪3lを駆動するとともに、リングギヤ11Rに接続される。また、クラッチ13は、その締結力を変更することで、左側後輪3l及びキャリア11Cから動力が伝達されて駆動される右側後輪3rの間で、両駆動輪のトルクを変更する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン回転数の急上昇を伴うことなく大きな減速度を得ることが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力を出力すると共に回生制動力を作用させるモータジェネレータと、目標車速を達成するように前記モータジェネレータの制駆動力を制御する自動走行制御手段と、を備えたハイブリッド車両の制御装置において、前記駆動輪に対して前記回生制動力を限界まで作用させたにも関わらず前記目標車速を上回った場合に下り勾配と判定する下り勾配走行判定手段と、下り勾配と判定した場合に前記モータジェネレータの回生制動力限界値を前記回生制動力が大きくなるように変更する限界値変更手段とを備えた。
(もっと読む)
車両用運転装置
【課題】加速操作と制動操作の操作態様が異なる車両用運転装置を得る。
【解決手段】車両用運転装置10では、コントロールノブ22が胴部14に対して相対回転されると車両が加速され、グリップ24がコントロールノブ22に対して相対回転されると車両の操舵輪が転舵される。また、コントロールノブ22及びグリップ24が取り付けられたコントローラ12が車両に対して前方側へ相対移動されると車両が制動される。
(もっと読む)
1 - 20 / 162
[ Back to top ]