
Fターム[3D046GG02]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166) | 推進装置 (571) | エンジン出力 (409)
Fターム[3D046GG02]に分類される特許
1 - 20 / 409
踏み間違えるとアクセルペダルがブレーキペダルなる。
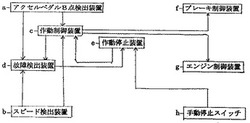
【課題】急な上り坂等も、走行可能である、停車時、又低速で、アクセルペダルを強く踏み込むと、エンジンが停止し、ブレーキが掛かる。
【解決手段】アクセルペダルが、B点通過後、低速になっても走行可能である、運転者がパニックを起こし、アクセルペダルを、ブレーキペダルと間違えて強く踏み込むと、エンジンを停止し、ブレーキを掛ける。
(もっと読む)
四輪駆動車の制御装置

【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、ブレーキペダル操作と独立に、四輪駆動車の主駆動輪及び/又は副駆動輪に所定の制動力を作用させる制動力制御手段2とを備える。
(もっと読む)
四輪駆動車の制御装置
【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、自励振動の発生に関係する少なくとも一つの要素の量を自動的に変更して、自励振動を制御する自励振動制御手段2とを備え、自励振動制御手段2は、アクセルペダル操作と独立に、エンジントルクを制御するエンジントルク制御手段21を備える。
(もっと読む)
車両運転支援システム
【課題】踏み切りの手前で車両を確実に減速して一時停止させ、安全に発進させることができる車両運転支援システム10を提供する。
【解決手段】 TVカメラ15を有し、車両の進行方向の道路状況を撮像した画像データを検出する画像検出手段11と、画像データに基づいて車両の進行方向に特定の対象物を検出する画像解析手段12と、画像解析手段12が車両の進行方向に踏み切りを検出すると、踏み切りに接近していることを運転者に通知し、車両の減速および一時停止を促す出力手段13と、車両の減速量に応じて、車両の減速および一時停止をアシストする車両制御手段14と、を具備する。更に、車載カーナビケーションシステム41を備え、車載カーナビケーションシステム41と画像解析手段12の検出結果を比較し、比較結果に応じて車両制御手段14を制御する。実際の道路状況を勘案しながら、ナビモードで走行できる。
(もっと読む)
CMSブレーキの制御装置及びその制御方法
【課題】牽引車において、牽引時、非牽引時に関わらず、最適の制動力が得られ、急制動時にも、ジャックナイフ現象等の不安定な車両挙動を防止する衝突被害軽減ブレーキ装置及びその制御方法の提供。
【解決手段】被牽引車有無判断ブロック(32)と、牽引車(1)側のブレーキ(B1)及び被牽引車側のブレーキ(B2)の制動力を調節する制御信号を発生する制御信号発生ブロック(33)とを有し、前記制御信号発生ブロック(33)は、被牽引車有無判断ブロック(32)が、被牽引車(2)が無いと判定した場合には被牽引車が無い場合用の制御マップ(M1)を、被牽引車有無判断ブロック(32)が、被牽引車(2)が有ると判定した場合には被牽引車が有る場合用の制御マップ(M2)を選択する。
(もっと読む)
車両のブレーキ制御装置
【課題】エンジンブレーキ(スロットル弁開閉アクチュエータ20)及び車輪ブレーキ(車輪ブレーキ作動手段21)の両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する場合に、ブレーキ作動開始初期に制御が不安定になるのを防止する。
【解決手段】エンジンブレーキ及び車輪ブレーキの両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する際に、エンジンブレーキを車輪ブレーキよりも所定時間だけ遅延させて作動開始させる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両の運動状態を制御する主操作部材に設けた副操作部材の操作でヨーモーメント発生装置の作動を制御するものにおいて、副操作部材が出力する指令信号のノイズの影響を低減する。
【解決手段】 運転者がステアリングホイール7に設けたグリップ9L,9Rを操作すると、そのグリップ9L,9Rの操作に応じてヨーモーメント発生装置が車両のヨーモーメントを変化させるので、ステアリングホイール7を操作して車両の運動状態を制御するのと同時並行して、車両の旋回を補助あるいは抑制することができる。このとき車速の増加に応じてグリップ9L,9Rの操作量に対するヨーモーメントの変化量を変更するので、運転者によるステアリングホイール7の保持力や操作力が増加するためにグリップ9L,9Rの操作にノイズが乗り易くなっても、そのノイズの影響を最小限に抑えてヨーモーメント発生装置が不適切なヨーモーメントを発生するのを防止することができる。
(もっと読む)
自動車およびその制御方法
【課題】トラクション制御や姿勢保持制御の実行の有無に応じたストール発進を行なう。
【解決手段】ストール発進時にトラクションコントロールか姿勢保持制御のいずれかがオンの状態のときには回転数が低く調整された通常時の目標回転数設定用マップを用いてエンジン目標回転数Ne*を設定し(S130)、トラクションコントロールも姿勢保持制御もオフの状態のときにはより大きな回転数が目標回転数Ne*に設定されるオフ時の目標回転数設定用マップを用いてエンジンの目標回転数Ne*を設定し(S140)、設定した目標回転数Ne*によりエンジンが回転すると共にアクセル開度Accに応じた要求トルクTr*が駆動軸に出力されるようエンジンとモータMG1,MG2を制御する(S150〜S210)。これにより、トラクションコントロール(TRC)や姿勢保持制御(VSC)の実行の有無に応じたストール発進を行なうことができる。
(もっと読む)
車両およびその制御方法
【課題】運転者が車両の起動中にシフト操作を行った場合であっても、車両の起動後に再度のシフト操作をすることなく違和感なく発進できるようにすること。
【解決手段】ハイブリッド自動車20の起動中に運転者によりシフト操作が行われたときは、そのシフトポジションSPをCPU72に記憶する。そして、起動が完了したときに、走行するシフトポジションSPがRAM76に記憶されており、ブレーキポジションBPが0%でなく且つアクセル開度Accが0%であるとはいえないとき、RAM76に記憶されたシフトポジションSPとアクセル開度Accと車速Vとに基づいて設定された要求トルクTr*が出力されるようエンジンECU24やモータECU40に指令を出力すると共に、所定の初期値から時間と共に徐々に小さな値に設定される制動トルクが作用するようにブレーキ96a〜96dを制御するようブレーキECU94に指令を出力する。
(もっと読む)
車両の障害物認識装置
【課題】自車両前方の障害物を検知する障害物検知手段(レーダ装置1)を備えた車両の障害物認識装置において、ヨーレートセンサ13の検出値と自車両Wの車速を検出する車速検出手段(車速センサ12)により検出された車速とに基づいて自車両Wの進行路を推定する場合に、自車両Wの走行状況に応じて、その推定を出来る限り正確に行えるようにする。
【解決手段】車速検出手段により検出された車速に応じて、ヨーレートセンサ13の検出値を補正する。具体的には、車速検出手段により検出された車速が所定車速以上であるときには、該所定車速よりも小さいときに比べて、ローパスフィルタのカットオフ周波数を低くする。
(もっと読む)
ブレーキ装置
【課題】誤操作や誤動作による悪影響を低減できるブレーキ装置を提供すること。
【解決手段】ブレーキ装置10に緊急ブレーキスイッチ20を設け、緊急ブレーキスイッチ20を操作してから設定時間の経過後に、緊急ブレーキスイッチ20によるブレーキ力を低下させる。これにより、緊急制動時以外の制動時に緊急ブレーキスイッチ20を操作するような誤操作をした場合でも、設定時間の経過後にはブレーキ力は低下するので、車両1が不必要に減速し続けることを抑制することができる。また、車両1の制動時以外に緊急ブレーキスイッチ20を誤って操作し、制動時以外に車両1を制動する、つまり、ブレーキ装置10が誤動作により制動をする場合でも、設定時間の経過後にはブレーキ力は低下するので、車両1が不必要に減速し続けることを抑制することができる。これらの結果、誤操作や誤動作による悪影響を低減することができる。
(もっと読む)
走行制御装置
【課題】定速走行制御と追従走行制御とを切り替える時に各制御による制御値を滑らかに推移させながらも制御性能を悪化させない走行制御装置を提供すること。
【解決手段】積分制御を含むフィードバック制御により車速Vを目標車速V*に制御する定速走行制御、及び、積分制御を含むフィードバック制御により車間距離Xを目標車間距離X*に制御する追従走行制御を有する走行制御装置100は、追従走行制御に関する制御値Vx及び定速走行制御に関する制御値V*の二つの対応する制御値を切り替えて何れか一方の制御値を出力させる制御切り替え手段SW1と、制御切り替え手段SW1が出力する制御値Vtに基づいて車輌における制駆動力を制御する制駆動力制御手段14と、制御切り替え手段SW1による切り替え時に二つの対応する制御値を等しくして走行制御を継続させる走行制御手段1と、を備える。
(もっと読む)
エンジンの制御装置
【課題】本発明は、燃焼停止後に触媒装置へ送られる余剰の空気を抑制するエンジンの制御装置を提案する。
【解決手段】エンジン(2)の制御装置(1)は、ターボチャージャ(3)と、このターボチャージャ(3)を構成するタービン(3b)の回転を抑制するターボ回転抑制手段と、このターボチャージャ(3)の下流に配置された触媒装置(7)とを備える。このターボ回転抑制手段は、エンジン(2)における燃焼停止時に作動する。制御装置(1)は、エンジン(2)の燃焼停止時にエンジン(2)やターボチャージャ(3)に備わるタービン(3b)の回転駆動による酸素を含んだ空気の触媒装置(7)への流入を抑制し、触媒の還元能力の低下を抑える。
(もっと読む)
車両用駆動力制御装置
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
周辺監視装置および周辺監視方法
【課題】外部の状況を鑑みて不要な情報提供や動作制御を抑制・禁止する周辺監視装置および周辺監視方法を提供すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から歩行者認識部18が歩行者を認識するとともに、特定環境検知部19が信号前停止、横断歩道前停止、歩道状態、道路種別、走行車線など歩行者を認識してもその歩行者との衝突が発生する可能性が低く、情報提供や車両制御の必要性が小さい特定の状況を検知する。そして特定の状況を検知した場合には、運転者に対する報知や車両動作の制御を禁止・抑制する。
(もっと読む)
パワートレーンの制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体
【課題】出力軸に伝達されるトルクが反転することにより生じるショックを低減する。
【解決手段】ECUは、MG(2)を用いた回生制動が不可能であると、MG(2)を用いた回生制動を制限するステップ(S120)と、エンジンにおいて燃料噴射を停止するフューエルカットを実行するステップ(S130)と、アップシフトを行なうと判断され(S140にてYES)、かつエンジンおよびMG(1)により出力軸に伝達されるトルクが車両を減速させるトルクであると(S150にてYES)、フューエルカットから復帰するようにエンジンを制御するステップ(S160)と、車両を減速させないトルクが出力軸に伝達されるように、エンジンおよびMG(1)を制御するステップ(S170)と、変速機がアップシフトを行なうように制御するステップ(S180)とを含む、プログラムを実行する。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
車両の制御装置
【課題】エンジン始動時におけるドライバーの混乱を防止することができる車両の制御装置を提供する。
【解決手段】エンジン3を一時停止させる自動停止制御部14と、一時停止中に再始動操作がなされたとき制動手段5を継続して作動させる制動力保持部16と、エンジン3を再始動させる再始動制御部17とを備えた車両2の制御装置1において、上記車両2のトランスミッション4を制御するための変速制御部12と、上記再始動制御部17により上記エンジン3が再始動された際に、上記変速制御部12により上記トランスミッション4が発進段にギヤインされたときは、上記制動力保持部16による上記制動手段5の作動を解除し、他方、上記トランスミッション4が失陥して発進段にギヤインできなかったときは、手動による制動操作が行われるまで待機した後、上記制動力保持部16による上記制動手段5の作動を解除する制動力保持解除部18とを備えたものである。
(もっと読む)
1 - 20 / 409
[ Back to top ]