
Fターム[3D046KK11]の内容
ブレーキシステム(制動力調整) (22,399) | 制御回路要素 (645) | タイマー素子 (302)
Fターム[3D046KK11]に分類される特許
1 - 20 / 302
電動車両の停止制御方法
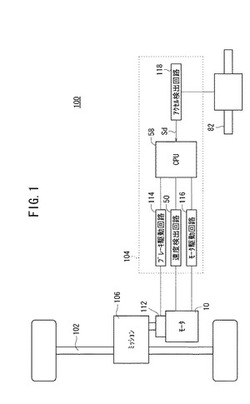
【課題】廉価なホールICを用いて、しかも、誤差成分の影響を最小にして高精度に電動車両の停止制御を行うようにする。
【解決手段】電動車両100は、操作レバー82と、車軸102と、操作レバー82からの操作指示に基づいて回転制御されるモータ10と、モータ10の回転力を車軸に伝達する伝達機構106と、モータ10の回転を制動するための電磁ブレーキ108と、モータ10の回転に伴って生成される一連のパルス信号に基づいてモータ10の回転速度を検出する速度検出回路50を有する。そして、操作レバー82からの操作指示がモータ10の回転停止を示し、且つ、モータ10の回転が電子制御ユニット104によって減速制御される時点から、速度検出回路50からのパルス信号の2回の立ち下がりを経過した時点を、モータ10の回転を電磁ブレーキ108によって停止させる契機の基準時点とする。
(もっと読む)
シフト制御システム

【課題】車両停止時におけるPスイッチの操作に際して運転者に違和感を与えることのないシフト制御システムを提供する。
【解決手段】車両が完全に停止していないにもかかわらず運転者がPレンジへの切替要求を入力した場合、直ちにPレンジに切り替えるのではなく、ホイールシリンダ圧が所定の保持圧Phに保持される。つまり、ホイールシリンダ圧を残し、車両の停止が推定される保持時間Δtの経過後にPレンジに切り替えられる。また、そのPレンジのロック機構を作動させた後に、ホイールシリンダ圧を保持圧Phから所定の減圧勾配をもって徐々に減圧させるようにする。
(もっと読む)
車両の運転支援装置
【課題】現在のみならず将来予測される危険度を考慮して最適な回避ルートを通過するように制御して安全性を向上させる。
【解決手段】制御ユニット5は、自車両1の周辺に存在する白線、ガードレール、側壁、及び、立体物のそれぞれを対象として、現在のトータルリスク関数を設定し、各対象の位置の時間的変化を予測してトータルリスク関数の時間的変化を予測して、このトータルリスク関数の時間的変化を基に各時間毎の自車位置におけるY軸方向の極小点を演算する。そして、各時間毎の目的関数を作成し、該目的関数を最小とする各時間毎の旋回制御量を自車両の旋回制御量として演算して、自車両が各時間毎の旋回制御量で移動したときの各ルート毎のリスク関数を設定し、各ルート毎のリスク関数から最終的な回避ルートを選択し、最終的な回避ルートに基づいて操舵制御、及び、ブレーキ制御を実行させる。
(もっと読む)
車両用ブレーキ制御装置
【課題】ウィリー走行中であっても、車輪速センサの異常判定をより精度良く行える車両用ブレーキ制御装置を提供することを目的とする。
【解決手段】二輪車用ブレーキ制御装置1Aは、前輪TF、後輪TRの車輪速度を取得する車輪速センサ2F、2R、液圧ユニット31、制御ユニット30Aを備えている。制御ユニットは、前輪車輪速度から車輪加速度を取得する従動輪加速度取得手段32と、車輪加速度に基づいて走行状態を判定する走行状態判定手段33Aと、車輪速センサの異常の有無を判定する異常判定手段34と、液圧ユニットを制御する制動力制御手段35を有している。異常判定手段は、後輪が非停止状態を示し、前輪が停止状態を示している場合に、走行状態判定手段に前輪が浮き上がったままの走行状態かどうか判定させ、その結果に基づいて前輪の車輪速センサに異常が有るか否かを判定する。
(もっと読む)
液圧ブレーキ装置およびその制御方法
【課題】液圧ブレーキ装置において、液漏れ等の失陥発生時にリザーバタンクからの空気吸い込みを防止しつつブレーキの制御可能時間を延長する。
【解決手段】液面スイッチ80は、リザーバタンクの予め定められた下限液面へのブレーキ液面の低下を検知する。タイマ部108は、リザーバタンク内の液面の傾斜によって液面スイッチがブレーキ液面の低下を検知する第1時刻から、車両が加減速しておらずブレーキ液面が水平であるときに液面スイッチがブレーキ液面の低下を検知する第2時刻までの経過時間を計測する。液漏れ推定部103は、第1時刻の加速度を参照して液面高さマップ保持部102から対応する液面高さを取得し、経過時間と液面高さからブレーキ液面低下速度を算出する。猶予時間算出部110は、ブレーキ液面低下速度に基づいて液圧ブレーキ装置の制御を停止するまでの猶予時間を計算する。
(もっと読む)
自動車の運転におけるアクセルペタルの踏み間違いによる緊急自動停止装置。
【課題】従来、自動車の運転において、アクセルペタルとブレーキペタルの操作は、右足で別々に操作し通常の運転では問題ないが、突作の場合アクセルペタルをブレーキペタルと間違え、そのまま、急激に踏込んでしまう場合、事故になるケースがあり、その場合にのみ自動制動が働き、急停車するようにした。
【解決手段】アクセルペタルの動きを2個のセンサ、速度センサ3、近接センサ4で異常な動きをキャッチし、その信号により、モータを駆動し、自動制御でブレーキ操作するようにした。
(もっと読む)
車両の挙動制御装置
【課題】運転者の技量に合わせて適切な時期に制御を開始するよう構成された旋回中の車両のヨー方向の挙動を修正するための車両挙動制御装置を提供すること。
【解決手段】本発明の車両挙動制御装置は、車両のいずれかの車輪のグリップ力が限界を越えていることを検出する手段と、車両のいずれかの車輪のグリップ力が限界を越えたことが検出された時点から待機時間の経過後に挙動制御が必要であるか否かを判定する手段とを含み、挙動制御が必要であると判定されたときに挙動制御の実行を開始することを特徴とする。挙動制御が必要か否かは、現在の時点から所定の予測時間が経過したときの車両がスピン状態になるか否かを予測することにより行う。
(もっと読む)
車両の制動装置
【課題】制動時における車室内の快適性を向上できる制動装置を提供する。
【解決手段】ブレーキペダルの操作量に応じた制動力を発生するポンプ8を備えた車両の制動装置である。所定条件下、ポンプ8の作動による制動力の変化速度を、車体速度やエンジン回転数に応じて変更し、当該車体速度若しくはエンジン回転数が低い程、当該変化速度を小さく抑える。
(もっと読む)
車両およびその制御方法
【課題】駆動系の起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制する。
【解決手段】パワースイッチからプッシュ信号が入力されてから所定時間tlat1が経過する前にシフトポジションが走行ポジションにシフト操作されたときには、シフト操作されないときの所定時間tlat1よりも長い所定時間tlat2が経過するまで起動指示フラグFに値1を設定し続ける即ち起動指示を行ない続ける。これにより、シフトポジションが走行ポジションにシフト操作された後に再び非走行ポジションにシフト操作されたときに起動処理実行条件が成立する可能性を高くすることができる。この結果、起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制することができる。
(もっと読む)
ブレーキ装置
【課題】 BBW式ブレーキ装置において、ABS装置の作動時における制動距離の短縮を図る。
【解決手段】 運転者がブレーキペダル12を踏むと、スレーブシリンダ23が発生したブレーキ液圧でホイールシリンダ16,17,20,21が作動して車輪が制動される。車輪がロック傾向になってスレーブシリンダ23およびホイールシリンダ16,17,20,21間に配置されたABS装置24が作動すると、ABS装置24の非作動中に対して前記スレーブシリンダ23のアクチュエータ31の駆動が変更され、ABS制御におけるブレーキ液圧の増圧レートが最適の値に制御されるので、車輪のロックを抑制しながら制動距離を短縮することができる。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ブレーキ7(FL,FR,RL,RR)の作動中に車輪6(FL,FR,RL,RR)がロック傾向になったときに制動力を減少させるアンチロックブレーキ制御を実行する装置20において、ブレーキング中に車輪6がジャンプしてから着地するときに、駆動系にかかる負荷を軽減可能とする。
【解決手段】ブレーキング中において車輪6が走行路面からジャンプすることによって、アンチロックブレーキ制御の実行条件が成立したときに、当該アンチロックブレーキ制御における制動力減少動作を抑制させる。これにより、ジャンプしていた車輪6が着地したときの制動力が従来例のように減少されずに済むので、着地時に車輪6に作用する負荷が車輪6およびブレーキ7で吸収されることになって、駆動系にかかる負荷が軽減される。
(もっと読む)
車両の運転支援装置
【課題】ドライバの走行する環境を精度良く検出し、自然で最適な警報や自動ブレーキ制御を行う。
【解決手段】制御ユニット8は、予めドライバの視線挙動に基づいて漫然状態と判定された際の入力画像を基準画像として設定する。そして、この基準画像と入力画像の正規化相関を演算し、この正規化相関の相関値から、ドライバの漫然状態を検出し、漫然状態と判定した場合には、警報の頻度を高め、衝突回避のための自動ブレーキ制御の開始タイミングを早めるように変更する。
(もっと読む)
車両の運動制御装置
【課題】車両の運動制御装置において、大きな液圧振動を発生させないように液圧ユニットを制御することにより、車両挙動センサの検出精度の向上を図る。
【解決手段】車両の挙動を検出する車両挙動センサと、車両の各ホイールシリンダに付与される液圧を個別に制御するための複数の液圧機器を搭載した液圧ユニットと、車両挙動センサの検出結果に基づいて液圧機器を制御して車両の運動を制御するための電子制御装置と、が一体化されてなる車両の運動制御装置であって、電子制御装置は、各ホイールシリンダのうち任意の複数のものへの液圧の付与状態を時間的に連関させて切り替える場合に、各ホイールシリンダへの液圧の付与状態を互いにタイミングをずらして切り替えるように各液圧機器を制御する(ステップ402〜420)。
(もっと読む)
車両制動力制御装置
【課題】 停止ショック低減制御とABSとを併用する場合において、車両が停止状態に移行する際にABSが作動しても停止ショックを抑制すること。
【解決手段】 車両用ブレーキ制御装置1は、車輪のロックを抑制するために、目標スリップ率を設定することで車輪の制動力を制御可能なABS制御部15aと、車両の車速が閾値未満になった場合に車両の制動力を低減させ、車両が停止した時に制動力を増大させる停止ショック低減制御部15bとを備え、当該車両の車速が閾値未満になった場合に、ABS制御部15aにおいて目標スリップ率を低く設定することを特徴とする。
(もっと読む)
車間距離制御装置
【課題】停止車両以外の静止物体を車間制御のターゲットから極力除外し、また、車間制御のターゲットを先行車両から割込車両へ早期に変更することができる車間制御装置を提供する。
【解決手段】運転者がコントロールSW21から停止車両選定指示や割込車両選定指示に対応するコースト操作を行った場合に、停止車両や割込車両をターゲットの候補として抽出しやすくする。
(もっと読む)
車両の制御装置
【課題】ブレーキホールド制御実施中にニュートラル制御を実施している状況から、発進要求に応じてニュートラル制御からの復帰を行うときに、そのニュートラル制御の復帰時のショックを抑制する。
【解決手段】ニュートラル制御からの復帰時に、運転者のアクセルペダル踏み込み量に関係なく、スロットルバルブを、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに開いて、エンジントルクの早期上昇を抑制する(ステップST4)。また、ブレーキ圧についても、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに解放する(ステップST5〜ST8)。このようにして、ニュートラル制御からの復帰時の環境(スロットル開度、ブレーキ力)を、前進クラッチの係合を考慮して適正に設定することで、ニュートラル制御からの復帰時のショックを抑制することができる。
(もっと読む)
車両制御装置および車両制御方法
【課題】運転者が速度順応現象に陥ったときに車両の安全を確保する。
【解決手段】走行情報取得部22は、車両走行情報を取得して蓄積する。判定部24は、車両走行情報の履歴に基づいて、高速走行により車両の運転者の速度感覚に影響を及ぼしうる時間として予め定められた所定時間にわたり高速走行が継続している速度順応条件が成立するか否かを判定する。制御量変更部26は、判定部24により速度順応条件が成立すると判定されたとき、運転者によるブレーキ操作量にしたがって設定される目標減速度を通常走行時より増加させる。ブレーキ制御部28は、目標減速度を参照して車両に制動力を発生させる。
(もっと読む)
ブレーキ制御装置
【課題】 油撃による振動の発生を回避したブレーキ制御装置を提供することにある。
【解決手段】 ホイルシリンダ圧制御時に電磁弁のデューティをPWM制御するPWM制御手段を備え、PWM制御手段は、電磁弁のデューティを第1のデューティに設定する第1デューティ設定手段と、第2のデューティに設定する第2デューティ設定手段と、第3のデューティに設定する第3デューティ設定手段と、を有し、第2のデューティは、第1のデューティよりも高いデューティ比であり、第3のデューティは、第1、第2のデューティの間のデューティ比であって、PWM制御手段は、電磁弁のデューティ比を第1のデューティから第2のデューティに変更する際、第3のデューティで電磁弁を一定時間制御した後、第2のデューティに設定することとした。
(もっと読む)
車両の走行制御装置
【課題】先行車両追従中の車両がハンチングを起こすことを抑制する。
【解決手段】本発明は、自車両前方を走行する先行車両の車速を測定する先行車車速測定手段を有し、前記先行車車速測定手段が測定した車速に基づいて自車両と先行車両との間の車間距離を予め設定された設定車間距離と略同一になるように該自車両を加減速制御する車両の走行制御装置であって、前記先行車車速測定手段が測定した車速の規定時間あたりの変化の程度を算出する車速変化算出手段を有し、前記車速変化算出手段が算出した規定時間あたりの車速の変化程度が所定の変化程度に比べて大きいとき、先行車両との間の車間距離を設定車間距離と略同一になるために必要な加速量または減速量に比べて小さい加速量または減速量で自車両の走行を制御することを特徴とする。
(もっと読む)
車両の回生/摩擦協調型制動制御装置
【課題】回生/摩擦制動協調制御に於いて、摩擦制動量及び車両に発生する制動力に対する摩擦要素のビルドアップ現象の影響を低減し、制動フィーリングを改善すること。
【解決手段】本発明の制動制御装置は、要求制動力と回生実行量とから算出される目標摩擦制動量に基づいて摩擦制動装置の制御量を決定する手段と、摩擦制動の作動開始時からその摩擦制動により吸収した制動エネルギーに基づいて目標摩擦制動量と実際の摩擦制動量とが一致するよう摩擦制動装置の制御量を補正する手段とを含む。摩擦要素の摩擦制動作動開始時から温度の変化分を摩擦制動により吸収した制動エネルギーの指標とし、摩擦制動装置の制御量の補正は、ビルドアップ現象による摩擦係数の変化を補償するようになされてよい。
(もっと読む)
1 - 20 / 302
[ Back to top ]