
Fターム[3D232DA50]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 積載量、荷重、車高 (126)
Fターム[3D232DA50]に分類される特許
1 - 20 / 126
車両用操舵装置及び荷役車両
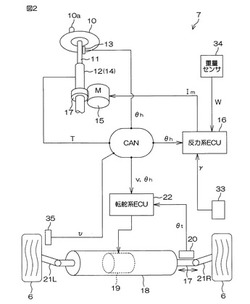
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法

【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両の自動走行制御装置
【課題】車両の自動走行制御装置に関し、動特性が変動した場合においても、目標走行ラインを安定して自動走行させる。
【解決手段】道路情報を検出するカメラ11と、目標走行ラインを設定する目標走行ライン設定部22と、目標走行ラインに対する車両の横方向相対位置を検出する相対位置検出部11,23と、車両重量を算出する車両重量演算部14,21と、車両を目標走行ラインに沿って走行させるための目標操舵角を算出する目標操舵角演算部25と、目標操舵角に基づいて自動操舵電流を算出する自動操舵電流演算部26と、自動操舵電流に応じてステアリング2を目標操舵角に回動させるアクュエータ15とを備えた。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
電動パワーステアリング装置
【課題】積載状態により車両重量が変化しても操舵フィーリングを低下させない電動パワーステアリング装置を提供する。
【解決手段】車両重量Wとバッテリ100のバッテリ電圧PIGは、電流制限値決定部24に入力される。電流制限値決定部24は、車両重量−最大出力制限値マップに基づいて、入力された車両重量Wに対応したモータ駆動電流の最大出力制限値を取得し、バッテリ電圧−出力電流制限値マップ上の出力電流制限値を変更する。そして、電流制限値決定部24は、上記バッテリ電圧−出力電流制限値マップに基づいて、検出されたバッテリ電圧PIGに対応する出力電流制限値Iul,Ivl,Iwlを決定し、モータ駆動電流制限手段23に出力する。
(もっと読む)
摩擦円半径導出装置
【課題】走行路の路面勾配が変化しても、正確な摩擦円半径を得ることができる摩擦円半径導出装置を提供する。
【解決手段】軌跡生成演算部は、まず地図データから、車両が走行しようとする走行路の路面勾配の情報を取得し、路面勾配を考慮しない走行軌跡を生成する。そして、軌跡生成演算部は、路面勾配及び車速等の情報に基づいて、路面に対する車輪の接地荷重を算出し、その接地荷重に基づいて、車両の実走行時における車輪の摩擦円半径(タイヤ発生能力)を求め、その摩擦円半径に基づいて、路面勾配を考慮した走行軌跡を生成する。
(もっと読む)
ステアバイワイヤの操舵反力制御装置
【課題】ステアリングホイールを中立位置から切り始めた際の良好な手応えを確保し、中立周りでの振動を防ぎつつ、手放し時における戻り位置を出来るだけ中立位置にするステアバイワイヤの操舵反力制御装置を提供する。
【解決手段】タイロッド間シャフト2と機械的に連結されていないステアリングホイール3に対し、操舵角センサ5と操舵反力モータ4とが設けられる。ステアリング制御手段12は、操舵角を基に、タイロッド間シャフト2を駆動する転舵機構6の転舵モータ7を制御する。ステアリング制御手段12に、操舵方向と転舵反力の方向とが異なる場合には正入力、同方向の場合には逆入力と判定し、この正逆に応じて操舵反力モータ4の操舵反力を制御する操舵反力制御部14を設ける。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車両の制御装置
【課題】加減速度のある旋回に拡張したスタビリティファクタを適正化することのできる制御装置を提供することを目的とする。
【解決手段】車両が実際に旋回走行した際の互いに異なる値の三つの前後加速度を求め(ステップS2,S7,S9)、それらの前後加速度が求められた各走行時の実スタビリティファクタを求め(ステップS4)、加減速度のある旋回時に拡張したスタビリティファクタの関係式に前記前後加速度と前記実スタビリティファクタを代入して三元連立一次方程式を立てて前記係数および他の係数ならびに定数項の定数についてそれぞれの値を求め(ステップS10)、その求められた前記係数および他の係数ならびに定数項の定数を前記関係式に代入して、加減速度のある旋回に拡張したスタビリティファクタの定義式を更新する(ステップS11)。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
車両用操舵装置
【課題】旋回性に優れ且つ車両姿勢が安定した車両用操舵装置を提供すること。
【解決手段】車両の幅方向Xに延びる第1の被動ラック9Aと第2の被動ラック9Bに、共通の駆動ピニオン10が噛み合う。トレッド幅変更アクチュエータ11が駆動ピニオン10を駆動すると、第1および第1の被動ラック9A,9Bが互いに反対方向に移動する。第1および第2の転舵輪3A,3Bをそれぞれ転舵する第1および第2の転舵アクチュエータ4A,4Bが、それぞれ、第1の被動ラック9Aおよび第2の被動ラック9Bと同行移動する。転舵角センサにて検出された転舵角等に応じて、トレッド幅変更アクチュエータ11を駆動制御し、トレッド幅WTを変更する。
(もっと読む)
車両用操舵装置
【課題】ノブを用いた操舵に対して適切な操舵反力を付与することができる車両用操舵装置を提供する。
【解決手段】操舵部材10と後輪(転舵輪)との間の機械的な連結が断たれた車両用操舵装置9である。操舵部材10のホイール52の芯金54に固定されたノブ支軸56が、軸受62を介してノブ51を回転可能に支持する。ノブ反力アクチュエータ12が、ノブ支軸56に固定されたステータ59と、ノブ51の内周51aと同伴回転するロータ60とを有する電動モータである。ノブ中心C3周りのノブ51の回転に対して、そのノブ回転角に応じた適切な操舵反力を付与するように反力アクチュエータ12を反力制御する。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車両用制御装置
【課題】操舵部材を操作して車両を旋回させるときに、運転者が違和感を覚えたり、操舵部材の切増しが必要になったりすることがないようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、所定の車輪にキャンバが付与されているかどうかを判断するキャンバ付与状態判断処理手段と、所定の車輪にキャンバが付与されていると判断された場合に、操舵部材における操舵特性を、所定の車輪に付与されたキャンバに応じて変更する操舵特性変更処理手段とを有する。所定の車輪にキャンバが付与されている場合に、操舵特性がキャンバに応じて変更されるので、車両がアンダーステアの挙動を示すのを防止することができる。
(もっと読む)
車両運動制御装置
【課題】横転限界舵角をより正確に演算し、車両状態に応じた操舵制御が行えるようにする。
【解決手段】車両重量Mや重心高Hおよび車速Vに基づいて随時に横転限界舵角Strlimを演算する。これにより、車両状態に応じた正確な横転限界舵角Strlimを演算することが可能となる。また、横転限界舵角Strlimに対応する舵角反力特性を求めておき、ドライバがステアリング操作して舵角Strが発生したときに、その舵角Strに対応する舵角反力を発生させることで、より早くから横転限界舵角Strlimに至らないように舵角Strを抑制する。横転が発生する直前の舵角Strである横転限界舵角Strlimを車両重量Mや重心高Hおよび車速Vに応じた値として演算しているため、車両状態に応じた操舵制御を行うことが可能になる。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
1 - 20 / 126
[ Back to top ]