
Fターム[3D232DC09]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 計時手段(タイマー) (523)
Fターム[3D232DC09]に分類される特許
141 - 160 / 523
運転支援装置
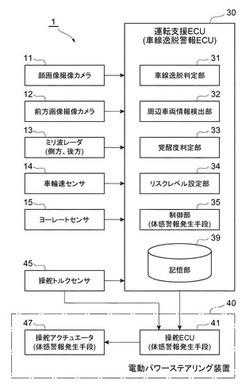
【課題】運転者の覚醒度、及び、自車両の周辺環境に応じて、体感警報を発生させることで注意喚起を行なうことが可能な運転支援装置を提供することを目的とする。
【解決手段】自車両周辺の他車両の情報である周辺車両情報を検出すると共に、自車両の運転者の覚醒度を検出し、これらの周辺車両情報及び覚醒度に基づいて、自車両のリスクレベルを設定する。さらに、運転者が触覚を用いて認識することができる刺激を付与することで、体感警報を発生させる体感警報発生手段35,41,47を備える構成とする。これにより、設定されたリスクレベルに応じて体感警報を発生させることができ、覚醒度、及び、自車両の周辺環境に応じて、注意喚起を実行することができる。
(もっと読む)
後輪舵角制御装置

【課題】後輪舵角の限度を路面の凹凸の状態に基づいて決定し、後輪舵角を目標値通りに制御できる機会を多くすること。
【解決手段】車輪が路面の凹凸によりバウンドしたりリバウンドしたりすると、車輪が転舵可能な角度の上限値(限度)も変化する。一般的には、車輪がバウンドする(車高が小さくなる)と、車輪が車体に接近し、隙間が小さくなるため限度も小さくなる。そこで、後輪12が通過する路面の凹凸の状態が、前輪10の上下方向の挙動に基づいて予測され、その予測された路面の凹凸の状態に基づいて限度が決定される。そして、後輪12がその路面を通過する場合に、後輪12の転舵角度が、決定された限度を超えない大きさに制御される。
(もっと読む)
旋回挙動制御装置、旋回挙動制御方法
【課題】旋回性能の低下を防ぎつつ旋回挙動の安定化を図る。
【解決手段】差分E1を算出し(ステップS1)、差分E1が第一の所定値th1を超えたら(ステップS3の判定が“Yes”)、その時点の推定値γeを目標値γ*として設定する(ステップS4)。そして、差分E2を算出し(ステップS6)、この差分E2が第二の所定値th2より大きいときに(ステップS7の判定が“Yes”)、差分E2に応じて転舵角θwの修正量Δθを算出し(ステップS8)、修正量Δθに応じてカウンターステアを行う。その後、再び差分E2が第二の所定値th2より小さくなり、且つ差分E1が第一の所定値th1より小さくなったら(ステップS10の判定が“Yes”)、修正量Δθの算出及びカウンターステアを終了する。
(もっと読む)
車両用操舵制御装置及び車両用操舵制御方法
【課題】運転者に違和感を与えることなく適正に操舵反力を付与することができる車両用操舵制御装置及び車両用操舵制御方法を提供する。
【解決手段】ステアリングホイール1と舵取り機構10(転舵機構)とを機械的に切り離した構成とし、前輪(操向輪)11R,11Lの転舵角θtが、自車両の走行状態に基づいて演算した自動転舵指令角θaとなるように、転舵モータ8を駆動制御する自動転舵制御を行う。このとき、自動転舵制御により発生した自動転舵指令角θaに対応する路面反力Faを推定する。そして、検出した実路面反力Fから推定した推定路面反力Faを差し引いた反力偏差相当の操舵反力をステアリングホイール1に付与するように、反力モータ5を駆動制御する。
(もっと読む)
パワーステアリング装置
【課題】操舵フィーリングの低下を強く感じてしまうことを防止できるパワーステアリング装置を提供すること。
【解決手段】パワーステアリング装置1は、操舵補助力発生用の油圧ポンプ20を駆動するための電動モータ22と、電動モータ22がフェール状態にあることを報知するための警告灯37とを備えている。電子制御ユニット24は、電動モータ22の回転数Rが所定のしきい値Rt以下である低回転状態が第1の時間T1以上継続したときには、警告灯37を点灯させる。さらに、電子制御ユニット24は、低回転状態が第1の時間T1よりも長い第2の時間T2以上継続したときには、電動モータ22の駆動を停止させる。このような制御により、電動モータ22が停止することを運転者が事前に予測できる。
(もっと読む)
車両用操舵制御装置及び車両用操舵制御方法
【課題】操舵反力系フェール時にSBW制御からEPS制御への移行を確保することができる車両用操舵制御装置及び車両用操舵制御方法を提供する。
【解決手段】クラッチ6を締結解除した状態では、操舵反力モータ5及び転舵モータ8を駆動制御してステアバイワイヤ制御(SBW制御)を行う。クラッチを締結した状態では、転舵モータ8を駆動制御して操舵補助制御(EPS制御)を行う。SBW制御中に、メイン操舵トルクTm、サブ操舵トルクTs、推定操舵トルクTrを用いて多数決診断を行い、異常が発生している操舵トルク値を判別する。そして、SBW制御中に操舵反力系に異常が発生すると、SBW制御からEPS制御に移行する。このとき、判別した正常な操舵トルク値を用いてEPS制御を行う。
(もっと読む)
パワーステアリング装置
【課題】運転時間若しくは旋回時間の長さに応じて、付加摩擦トルクを適切に制御することが可能なパワーステアリング装置を提供する。
【解決手段】パワーステアリング装置は、実操舵角や目標操舵角などに基づいてステアリングに付与すべき付加摩擦トルクを設定し、当該付加摩擦トルクを付与する制御を行う。付加摩擦トルク変更手段は、車両の運転時間若しくは旋回時間の長さに基づいて、付加摩擦トルクを変更する。これにより、運転時間が長い場合、若しくは旋回時間が長い場合に、腕の疲れを考慮した付加摩擦トルクを、ステアリングに適切に付与することができる。よって、保舵時の安定性などを向上させることが可能となる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】温度により変化する配線抵抗等による制御精度の低下を解消または抑制し、高い精度でモータを駆動できるモータ制御装置を提供する。
【解決手段】指令電流算出部21は、dq軸上の指令電流id*、iq*を求める。オープンループ制御部22は、指令電流id* 、iq* と角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧に変換する。配線温度算出部27は配線を流れる電流から配線温度を算出し、配線抵抗算出部28は配線温度に応じた配線抵抗を算出する。3相電圧補正部29は、配線抵抗等による上記印加電圧の低下を補償するため、低下がない場合の印加電圧の各相毎の時間平均値に実際の値が一致するよう、算出された配線抵抗に応じて指令電圧を補正するので、配線抵抗等による制御精度の低下を解消または抑制できる。
(もっと読む)
ステアリング制御装置及びステアリング制御方法
【課題】ステアリング操作初期の応答性の向上と、ステアリング操作後期のヨーレイトによる車両の巻き込み現象の回避との両立を図る。
【解決手段】ステアリングホイール1の操舵速度θ′に対する操向輪7の転舵速度の比である速度比について、ステアリング操作初期の速度比をステアリング操作後期の速度比よりも大きな値に制御する。ステアリング操作初期の速度比は、ステアリングホイール1の操舵速度θ′の絶対値に比例した値で補正して、ステアリング操作後期の速度比は、ステアリングホイール1の操舵加速度θ″の絶対値に比例した値で補正する。
(もっと読む)
車輪転舵制御装置
【課題】車輪転舵用アクチュエータの駆動中にその駆動量における変動の検出が中断された場合に、実際の変動量と検出される変動量との間に生じた乖離を解消できる車輪転舵制御装置を提供すること。
【解決手段】車輪転舵制御装置100は、車輪を転舵させるアクチュエータ5の駆動量における相対的な変動量を検出する変動量検出手段10と、変動量検出手段10が検出した変動量に基づいて車輪の転舵量を推定しながら車輪の転舵を制御する車輪転舵制御手段11と、変動量の検出が中断されるか否かを判定する中断判定手段14と、変動量の検出が再開されるか否かを判定する再開判定手段15と、変動量に関する情報を不揮発性記憶媒体に記憶する変動量記憶手段12と、中断前の変動量の推移に基づいて検出再開後の変動量を算出する変動量算出手段13とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】車両挙動の安定性の制御と、運転者の負担軽減のための制御との間で、調和をとって車両挙動の安定性を良好とする電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置を制御するECUのEPS制御部は、操舵トルクTSと車速VSにもとづいて操舵補助力を出力するように制御するベース電流算出部31の他に、車両挙動の安定性向上のアクティブ制御をする第1制御部を構成するハンドル戻し制御部32、アンダステア制御部33、オーバステア制御部34、ヨーレート反力制御部35、及びスプリットμ制御部36と、運転者のハンドル操作の負担を軽減するための制御をする第2制御部を構成する外乱抑制制御部37、車体流れ制御部38を含んでいる。そして、第1制御部が作動している場合には、第2制御部の出力のゲインを第1制御部の出力が所定値以上でゼロとする。
(もっと読む)
操舵支援装置
【課題】 運転者の意図に応じた補助操舵トルクを付与することにより、運転者に与える違和感を軽減しながらハンドル操舵に適応した操舵支援制御が行うことができる操舵支援装置を提供する。
【解決手段】 逸脱防止支援ECU10は、操舵トルクが操舵トルクしきい値を超え、制御トルクが制御トルクしきい値を超えた時間が成立判定時間しきい値を超えたときに、干渉判定を成立させて、目標制御トルクを小さくする。ここで、車両の前方に他車両が走行し、他車両と白線との距離が所定値以下であり、かつ車両の他車両に対する到達時間が所定値以下の場合に操舵トルクしきい値、制御トルクしきい値、および成立判定時間しきい値を小さくする。
(もっと読む)
パワーステアリング制御装置
【課題】悪路走行中に発生する大きなステアリング振動を抑制し、良好な操縦安定性を得ることができるようにする。
【解決手段】予め設定した第2区間時間Δt2内に、予め設定したしきい値βを超過した最大車輪速変動幅ΔVmaxの平均値ΔVaveを算出し(S31)、この平均値ΔVaveに基づき、この平均値ΔVaveが大きくなるに従い小さくなる値の制御係数λを設定する(S32)。そして車速に基づいて設定した基本ダンパ制御量τdに制御係数λを乗算して悪路用ダンパ制御量τd’(τd’←τd・λ)を設定し、この悪路用ダンパ制御量τd’で、基本アシストトルクτtを減算して、目標アシストトルクτpを設定する(τp←τt−τd’)。
(もっと読む)
車両の操舵制御装置
【課題】 トルクセンサによって検出された操舵トルクの信頼性をアシストトルクの付与制御に反映させることができる車両の操舵制御装置を提供すること。
【解決手段】 電子制御ユニット24は、バッテリ電圧センサ21によって検出された電源(バッテリ)の電圧V_BATに基づき、操舵トルクセンサ23による操舵トルクTの検出信頼性の程度を表す信頼性レベルを判定する。そして、電子制御ユニット24は、判定した信頼性レベルに基づき、EPSモータ15を駆動させて運転者による操舵ハンドル11の回動操作に対して付与する目標アシストトルクTaを計算するために用いるアシストマップにおける不感帯の大きさを変更する。すなわち、電子制御ユニット24は、信頼性レベルが悪化するほど、アシストマップにおける操舵トルクTの不感帯の大きさがより大きくなるように変更する。
(もっと読む)
電動パワーステアリング装置
【課題】車両が横方向に流されるような異常の発生を好適に判定できる制御部を備えた、車両用の電動パワーステアリング装置を提供することを課題とする。
【解決手段】直進走行する車両Vの操舵トルクが所定トルク以上のときに運転者の負荷を低減するための傾斜路用補助トルクを、転舵機構に付与する傾斜路走行負荷低減制御を実行するとともに、傾斜路走行負荷低減制御の実行頻度が所定値を超えるときには、転舵輪2R,2Lや後輪のタイヤ空気圧の減圧やホイールアライメントずれなど、車両Vが横方向に流されるような異常が発生したと判定するEPSECU20を備えた電動パワーステアリング装置1とする。
(もっと読む)
車両制御特性変更方法
【課題】車両の運転者が違和感を感じない連続的な制御変更となる車両制御特性変更方法を提供することを目的とする。
【解決手段】車両制御装置の車両制御特性変更方法であって、車両操作入力周波数解析部が、車両操作入力検出部で検出された操作入力から、所定の閾値周波数より小さい第一FF周波数成分割合(λ1)を算出する第一周波数解析工程と、第一周波数解析工程の後、車両操作入力検出部で検出された操作入力から、所定の閾値周波数より小さい第二FF周波数成分割合(λ2)を算出する第二周波数解析工程と、第二FF周波数成分割合(λ2)と第一FF周波数成分割合(λ1)との差(Δλ)と、第二FF周波数成分割合(λ2)と、に基づいて変更後の車両制御装置の制御特性を決定する工程とを有する車両制御特性変更方法とする。
(もっと読む)
車両挙動制御システム
【課題】3つ以上の制御装置を有する場合に、作動させるべき制御装置を的確に且つ迅速に判断して適切な制御を行うことができるようにする。
【解決手段】電動パワーステアリング装置において電動モータ9により車両の挙動を制御するヨーレート反力制御部32、レーンキープアシスト制御部33及び衝突回避支援制御部34を有し、これらの制御の各々にその重要度に応じて優先順位が予め付与されており、制御の際には、現在作動中の制御装置と作動要求があった制御装置とを比較して、新たに作動要求が発生した制御装置の有無を判断し、新たに作動要求が発生した制御装置がある場合には、現在作動中の制御装置と新たに作動要求があった制御装置との間で優先順位を比較して、新たに作動要求があった制御装置を作動させる制御モードへの移行の要否を判断するようにする。
(もっと読む)
操舵支援装置
【課題】 操舵支援を中断した後に再開するにあたり、中断前の情報を有効に活用できるようにすることにより、精度のよい操舵支援を行うことができる操舵支援装置を提供する。
【解決手段】 操舵制御ECU1は、目標操舵トルク算出部14において、中断判定部12において車線維持制御を中断した後、車線維持制御を再開するにあたり、車両の走行ラインが共通する場合には、車線維持制御を中断したときの操舵出力積分値を用いる。ここで、斜線維持制御の中断前後で車両の走行ラインが共通するか否かは、操舵制御の中断時間に基づいて判断する。このとき、車両の通行方向と車両が走行する道路のロードキャンバの傾斜方向を用いる。ここで、車両の通行方向とロードキャンバの下り方向が一致する場合には、車両の走行ラインが車線維持制御の中断前後で一致すると判断する際のタイマしきい値を長くする。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差は負荷角θLである。この負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。リミッタ24は、制限値設定部28によって設定される制限値ωmaxに基づいて加算角αを制限する。制限値ωmaxは、モータ回転角速度に応じて可変設定される。
(もっと読む)
車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができる車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差は負荷角θLである。この負荷角θLに応じたアシストトルクTAが発生する。一方、検出操舵トルクTがフィードバックされ、指示操舵トルクT*に検出操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。指示操舵トルク補正部21Aは、回転角速度推定部27によって推定される推定モータ回転角速度に応じて指示操舵トルクT*を補正する。
(もっと読む)
141 - 160 / 523
[ Back to top ]