
Fターム[3D232DC09]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 計時手段(タイマー) (523)
Fターム[3D232DC09]に分類される特許
101 - 120 / 523
車両用接触回避支援装置
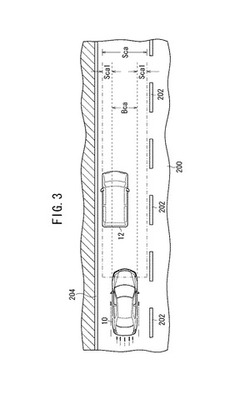
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両用接触回避支援装置

【課題】レーンキープアシスト手段によって車両が操舵制御されているときには、接触回避支援処理が過剰に作動しないようにする。
【解決手段】接触回避ECU20は、レーンキープアシスト部96によって車両10が操舵制御されているときは、車両10が自車線302を逸脱する可能性がきわめて低いことを考慮し、レーダ80によって検出された車両前方の対向車11との相対位置に基づき得られる接触余裕値Laの閾値Laを、レーンキープアシスト部96によって車両10が制御されていないときの第1閾値Lth1より小さい第2閾値Lth2に置き換えて、対向車11に対する当該車両10の接触回避支援を行うようにしたので、接触回避支援処理が過剰に作動する状況を防止できる。
(もっと読む)
電動パワーステアリング装置
【課題】一のセンサ信号に基づく操舵トルクの検出時において、より安定的にアシスト力付与を継続することのできる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、故障が検出されていない方のセンサ素子が出力するセンサ信号(残存センサ信号)を用いたアシスト継続制御の実行時には、そのアシスト力の付与とは無関係に、周期的に瞬発的なモータトルクを操舵系に印加すべくEPSアクチュエータの作動を制御する。そして、この瞬発的なモータトルクの印加が、そのアシスト継続制御の基礎となる残存センサ信号に反映されるか否かに基づいて、当該残存センサ信号の異常を検出する。
(もっと読む)
パワーステアリング機構
【課題】エンジンに直結された油圧ポンプにおける無駄な動力を削減することが出来て、車両の既存部品を生かして後付けが可能なパワーステアリング機構の提供。
【解決手段】油圧ポンプの吐出口(2o)と吸入口(2i)とを連通するバイパスライン(Lb)を有し、該バイパスライン(Lb)には流量調整弁(16)が介装されており、該流量調整弁(16)には制御装置(20)から開閉制御信号が入力され、制御装置(20)は、操舵角度センサ(18)が計測したステアリングの操作量と、操舵力センサ(19)で計測したパワーシリンダ(3)或いはナックルアーム(11)に作用する力とに基づいて、前記流量調整弁(16)を開閉制御する機能を有している。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】故障誤判定を抑制することにより当該故障検出に対する信頼性を高めつつ故障電流に対する保護機能の向上が図られる電動パワーステアリング装置の制御装置を提供する
【解決手段】FETの駆動が制限された状態で故障検出条件が非成立である旨判定される場合(ステップS202でNO)には、モータの端子電圧に基づき設定される制限解除条件が成立する旨判定されるとき(ステップS209でYES)にのみ、FETの駆動制限が解除される。このため、FETの駆動が制限された状態で故障検出条件が非成立である旨判定される場合に、当該制限が即時に解除されることはない。したがって、故障誤判定が抑制されることにより、当該故障検出に対する信頼性を高めつつ故障電流に対する保護機能の向上が図られる。
(もっと読む)
車両用操舵装置
【課題】車両用操舵装置において、伝達比制御モータの焼損の発生を未然に防止でき、フェイルセーフの確実性を増す。
【解決手段】操舵制御部30の起動に伴う初期診断において、ロック解除モードであることを確認した(ステップS2)後、伝達比制御モータ14をロック時の遊び量Bを超える第1の所定角度A1だけ回転変位させる(ステップS4)。これに応じた実際の回転位置変化量Δθが上記第1の所定角度A1未満の場合(ステップS7でYESの場合)、ロック解除モードであるにもかかわらずロック機構がロック状態にあることになる。これを第1の異常であるとして第1の異常信号を出力する(ステップS8)。車両の走行開始前に、第1の異常を検出し、これに応じた修理等の対処を走行開始前に可能とする。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルクが非操舵相当の所定範囲内にあるときも、制御装置で減速機構の駆動ギヤ5aに回転トルクを与える。すなわち、従動ギヤ5bを駆動するには不十分な微小な回転トルクをモータに生じさせることにより、駆動ギヤ5a及び従動ギヤ5b間で一方向へのバックラッシュBLがない状態とし、かつ、所定時間の経過等の所定の条件で回転トルクの方向を反転させ他方向へのバックラッシュBLがない状態に切り替える。
(もっと読む)
電動パワーステアリング装置
【課題】回転位置検出部毎の異常検出を行うことなく、回転位置検出部の異常を即座に正確に検出することができる電動パワーステアリング装置を提供する。
【解決手段】電動モータの回転位置に応じて2値の回転位置信号を出力する複数の位置検出手段と、前記複数の位置検出手段から出力される回転位置信号に基づいて状態関数を所定時間毎に演算して回転位置情報を算出する状態関数演算手段(ステップS14)と、前記電動モータの回転方向を検出する回転方向検出手段と、前記回転位置情報及び前記回転方向に基づいて次に出力される回転位置検出手段の回転位置信号を予測する出力信号予測手段(ステップS15)と、該出力信号予測手段で予測した回転位置信号が所定時間内に検出されないときに、該当する回転位置検出手段の異常と判定する異常判定手段(ステップS17〜S22)とを備えた。
(もっと読む)
車両接触回避支援装置
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
運転中の車両のドライバーを補助するための方法及びシステム
本発明は、現在の運転シナリオに基づいて望ましくない状況を回避するために、運転中の車両のドライバーを補助する方法であって、前記望ましくない状況を回避するために、車両操舵装置に対する第1案内力が望ましいか否かを予測するステップ、そして、第1案内力が望ましい場合には、前記望ましくない状況を回避するために前記操舵装置に付与されることになる前記第1案内力を含む合計案内力を予測するステップ、予測された合計案内力と限界値とを比較するステップ、そして、該予測合計案内力が前記限界値を超える場合には、前記望ましくない状況を回避するために前記操舵装置に前記予測合計案内力を付与すべきか否かを事前に決定するステップを特徴とする方法に関する。 (もっと読む)
ポンプ装置
【課題】直進走行時におけるポンプのエネルギ損失を抑制し得るポンプ装置を提供する。
【解決手段】電子コントローラ40により、少なくとも車速Vが第1所定車速以上である場合を直進走行状態とみなし、電磁弁16に与える指令電流を操舵角θ、操舵角速度ω及び操舵角加速度ωdの実際の検出値又は算出値に基づいて算出するのではなく、操舵角θ、操舵角速度ω及び操舵角加速度ωdを「0」として必要最小限の目標吐出流量から指令電流を算出して、これによって算出された指令電流をもって電磁弁16を介してカムリングの偏心を抑制するように制御したことにより、直進走行状態において僅かなステアリング操作やキックバック等の外乱によるステアリング動作等が発生した場合でも、ポンプの固有吐出量(吐出流量)が過敏に増加してしまうおそれがなく、当該ポンプのエネルギ損失の低減化に供される。
(もっと読む)
車両制御装置
【課題】運転者に与える違和感を抑制しつつ、目標値に実際の項目を近づけられる車両制御装置を提供すること。
【解決手段】走行環境あるいは走行条件の少なくとも一方に基づいて運転者に加わる加速度が変化する車両運動に係る項目(加速度)の目標値101を設定する目標値設定手段と、運転者の要求値102を設定する要求値設定手段と、対数値で比較したときの要求値との差が第一の範囲内となる項目の範囲である所定範囲A、および、対数値の変化速度で比較したときの要求値との差が第二の範囲内となる項目の変化速度の範囲である所定変化速度範囲をそれぞれ設定する範囲設定手段と、所定範囲内で項目を目標値に近づけ、かつ、項目の変化速度が所定変化速度範囲内となるように項目の指令値105を設定する指令値設定手段と、指令値に基づいて車両を制御する制御手段とを備え、第二の範囲は、要求値の変化速度に応じて可変に設定される。
(もっと読む)
車両用操舵伝達比可変式操舵装置
【課題】操舵伝達比可変式操舵装置により操舵伝達比が変更された後に操舵装置に残存するオフセットに起因して運転者が操舵操作時に覚える違和感を低減する。
【解決手段】操舵伝達比可変装置14によって操舵伝達比を変更する特定の制御によりオフセットが生じたときには(S180〜200)、特定の制御が終了する際のステアリングホイール20の操舵位置を基準操舵位置とし、基準操舵位置の両側の二つの操舵領域のうちステアリングホイール20の車両直進位置に対しオフセットの側と同一の側の操舵領域を第一の操舵領域とし、オフセットが0であるときの操舵伝達比を標準の操舵伝達比とする。特定の制御の終了後に運転者が第一の操舵領域に於いて操舵操作する場合には(S160)、目標ステアリングギヤ比Rstを標準よりも小さくすることにより(S210)操舵伝達比を標準の操舵伝達比よりも大きくする。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて、トルクセンサ異常時の代替的なアシスト制御時においても安定的にアシスト力付与を継続することのできる電動パワーステアリングを提供すること。
【解決手段】セルフステア抑制制御部52は、モータ21の回転角速度ωmに基づいてセ
ルフステアの発生を判定するセルフステア判定部53を備え、相セルフステアが発生したと判定した場合には、操舵系に付与するアシスト力を低減するセルフステア抑制制御を実行する。また、セルフステア抑制制御部52は、運転者によるステアリング操作の状態が保舵状態であるか否かを判定してその継続時間Tstbを測定する保舵継続時間測定部57
と、当該継続時間Tstbに基づいて、上記セルフステア判定に用いる閾値ωthを演算する
閾値演算部58とを備える。そして、閾値演算部58は、その保舵状態の継続時間Tstb
の増大に従って低下する閾値ωthを演算する。
(もっと読む)
車両用操舵制御装置、および操舵制御装置付き車両
【課題】ドライバへ違和感をあたえることを防止することができる車両用操舵装置を提供する。
【解決手段】車両用操舵装置は、ハンドルの操舵角に対する前輪の転舵角の比である舵角比を可変にすることができるとともに、後輪も転舵させることができる4輪アクティブステアシステムである。ハンドルの操舵角と前輪の転舵角との比である舵角比を変更する舵角比可変手段を駆動する転舵アクチュエータの負荷が予め定められた所定のしきい値よりも高い状態が設定時間以上継続したときには、その時点の舵角比よりも1に近い値となるように転舵アクチュエータを制御するようにした。
(もっと読む)
センサの基準点補正方法
【課題】走行状態の車両と停車中の車両における周囲温度の変化の影響を好適に回避してヨーレートセンサの基準点を補正できる、センサの基準点補正方法を提供することを課題とする。
【解決手段】走行状態の車両が停車し、停車した状態で所定時間ΔTstが経過したときに1回だけヨーレート中点補正する。そして、走行状態になることなく、停車した状態のままで所定時間ΔTstが経過した後は、ヨーレート中点補正しないことを特徴とする、センサの基準点補正方法。
(もっと読む)
電動パワーステアリング装置
【課題】 電動モータ20やモータ駆動回路32の過熱保護と操舵フィーリングの急変防止とを両立させる。
【解決手段】 加速度センサ70により検出される加速度Gに基づいて、車両が加速状態となった回数をカウントするとともに、そのカウント値から一定時間以上加速状態とならなかった回数を減算する。この加減算されたカウント値に基づいて、カウント値が大きいほど、電動モータ20の上限電流値を下げる。従って、電動モータ20やモータ駆動回路32が過熱防止温度に到達する前から、電動モータ20の出力制限を徐々に行うことができるため、従来のように操舵アシスト制限の突然の開始により操舵フィーリングが急変してしまうといった不具合を生じない。
(もっと読む)
センサの基準点補正方法
【課題】車両の始動直後に走行開始する場合であってもヨーレートの中点を補正できる、センサの基準点補正方法を提供することを課題とする。
【解決手段】走行状態の車両が停車してから、停車した状態で所定時間ΔTstが経過したときにヨーレートセンサのヨーレート中点を補正する、センサの基準点補正方法において、車両の始動時には、所定時間ΔTstより短い所定時間ΔTst’に亘って車両Vが停車しているときに、ヨーレートセンサを暫定中点補正することを特徴とする。
(もっと読む)
車両のトー角制御装置
【課題】 車両のトー角制御装置において、アクチュエータの機械的なガタの範囲内における制御が過剰となることを防止する。
【解決手段】 自動車100の各車輪3のトー角を個別に変化させる電動アクチュエータ8と、自動車100の操舵角、車速、ヨーレイト等を検出する各種センサ10〜17とを有し、操舵角、車速、ヨーレイトに基づいて電動アクチュエータ8の目標制御量を設定し、目標制御量に基づいて電動アクチュエータ8を駆動制御するトー角制御装置6であって、自動車100が走行する路面上の障害物と車輪3とが接触することによって電動アクチュエータ8に負荷が加わることと予測されるときに、目標制御量を低減させるべく補正係数を設定する補正係数設定部53と、補正係数に応じて目標制御量を低減させるべく制御ゲインを低減させる制御ゲイン設定部54とを有することを特徴とする。
(もっと読む)
車両のステアリング装置
【課題】 舵角比可変装置VGRSにより舵角比が大きく設定される場合に、電動パワーステアリング装置EPSの電動モータ31の追従性を確保するために車両電源電圧を昇圧してモータ駆動回路50に電源供給するものにおいて、操舵フィーリングを悪化させないように、昇圧回路60の過熱を防止する。
【解決手段】 昇圧回路60からモータ駆動回路50への電源供給路に副電源70を並列に接続し、副電源70に充電した電気エネルギーを使ってモータ駆動回路50への電源供給を補助する。昇圧温度センサ66により検出した昇圧回路温度の上昇にしたがって、副電源70からモータ駆動回路50への電源供給割合が増加するようにスイッチング素子74のデューティ比を調整する。
(もっと読む)
101 - 120 / 523
[ Back to top ]