
Fターム[3D232DC09]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 計時手段(タイマー) (523)
Fターム[3D232DC09]に分類される特許
21 - 40 / 523
ステアバイワイヤ式操舵装置
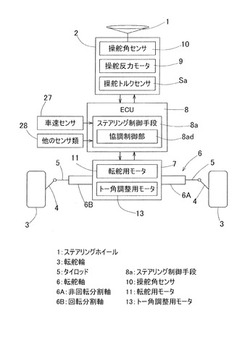
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
モータ制御装置及び車両用操舵装置

【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、複数種類の変量をそれぞれ検出する複数種類の変量検出手段を備え、制御部は、それぞれの検出値の絶対値が所定の範囲内にあり、かつ、それぞれの検出値の今回値の絶対値が前回値の絶対値より小さいことを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
操舵装置及び操舵制御装置
【課題】操舵フィーリングを向上させることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ操舵操作が可能である操舵部材5と、操舵部材5に対する操舵操作を補助するアクチュエータ9と、アクチュエータ9を制御し、操舵部材5の中立位置側からの切り込み操作に対応した当該操舵部材5の中立位置側への切り戻し操作を補助する戻し操作補助制御を実行可能であり、切り込み操作の際の操舵部材5の操舵量に応じて、当該戻し操作補助制御を実行する際の切り戻し操作時間を決定する操舵制御装置11とを備えることを特徴とするので、操舵フィーリングを向上させることができる。
(もっと読む)
電動パワーステアリング装置
【課題】
電動パワーステアリング装置に異常が発生して操舵補助が停止された場合に、ディファレンシャルギアをアクティブ制御することによって、運転者の操舵感に違和感を与えることなく代替操舵補助を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の異常を検出する異常検出部と、左右の車輪の回転数差を調整するためのディファレンシャルギアとを設け、異常検出部が電動パワーステアリング装置の異常を検出したときに、ディファレンシャルギアが車両状態に基づいて代替操舵補助を行う。
(もっと読む)
モータ駆動装置、およびこれを用いた電動パワーステアリング装置
【課題】 製造時に電流制限値マップを作成するための工数を少なくし、かつ実使用時に電流制限値を変更可能なモータ駆動装置を提供する。
【解決手段】 スイッチング素子の電流制限値を変更する場合、素子温度Tが時刻t1での素子温度T1から第1目標温度T01まで変化するのに必要な温度到達時間P1、および電流制限値Eが時刻t1での電流制限値E1から第1目標電流制限値E01まで変化するのに必要な電流到達時間P2が算出される(S103)。次に、温度到達時間P1と電流到達時間P2との大小を判定する。(S104)温度到達時間P1が電流到達時間P2以下の場合、スイッチング素子の電流制限値を変更する。(S105)これにより、モータ駆動装置の製造時に電流制限値マップを作成することなく、時刻t1での素子温度T1に基づいて、スイッチング素子の状態に応じた電流制限値に変更することができる。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構の作動に伴う操舵トルク変化を精度よく抑制し、運転者のステアリング操作時の違和感を解消し、走破性と安定性とを両立させる。
【解決手段】電子制御式の左右輪差動制限機構81の拘束トルク制御量に比例して拘束トルク比例制御手段201が操舵力制御機構へ出力させる付加トルクと、操舵反力フィードバック制御手段204が操舵力制御機構へ出力させる、演算した操舵系反力を打ち消す方向の付加トルクとの割合を、前記左右前輪の回転速度差に応じて切り替える第1の前輪左右速差補正係数規定手段202、第2の前輪左右速差補正係数規定手段205、第1の乗算処理手段203、第2の乗算処理手段206および加算手段207とを備える。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両に搭載されるステアリング装置において、ストッパーの位置関係を調整することなく、所望の旋回半径で安定的に旋回できるようにする。
【解決手段】操舵輪の操舵角が設定操舵角に到達した以降(s230「YES」)、ステアリング51への操舵トルクが制御されることで(s240)、設定操舵角を超えるような操舵輪の操舵が制限される。「設定操舵角」は、フォークリフトを所定の旋回半径で旋回させるのに適した操舵角として、設定変更可能な値であるホイルベースに応じたものが設定されるため(s220)、フォークリフトの機種などによりホイルベースが異なる場合であっても、このホイルベースを事前に設定変更しておくことにより、ホイルベースの違いに拘わらず、所望の旋回半径で安定的に旋回できるようになる。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】走行時におけるステアリングのふらつきを抑制することで、予期せぬ旋回を防止して旋回性や直進性を向上させることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作角度に応じて回転軸の角度が変更される後輪12と、ステアリングホイール16の操作角度を検出するエンコーダE11と、エンコーダE11の検出結果が過去の一定期間(遊び期間)に亘って予め設定された範囲(遊び範囲)内に収まっている場合には、ステアリングホイール16の操作角度をエンコーダE11の検出結果で示される操作角度に固定して後輪12を制御する制御装置34とを備える。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】第1電流センサのバックアップ用として設けた低分解能の第2電流センサを使っている場合でも、良好な操舵アシストを行う。
【解決手段】第1電流センサ31の異常が検出されている場合には、異常時モータ制御量演算部80が電圧指令値V*を演算する。異常時モータ制御量演算部80は、操舵トルクtrに比例した基本電圧V0に、逆起電圧の推定値に相当する補正電圧V1と、逆起電圧を推定するための交流電圧V2とを加算した値(V0+V1+V2)を電圧指令値V*として設定する。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
車両用操舵装置および車両用操舵装置の製造方法
【課題】ハウジング内で転舵軸の移動量を規制することができ、しかも小型で強度に優れた車両用操舵装置を提供する。
【解決手段】電動モータ21,22の回転動力をボールねじ機構23を介して転舵軸6の軸方向X1の移動に変換する、ステアバイワイヤ式の車両用操舵装置1である。転舵軸6の移動方向に応じて、転舵軸6の中間部のねじ軸32の両端の当接部45,46が、ロータ26内を挿通して、対応するストッパ47,48に当接することにより、転舵軸6の移動量を規制する。ストッパ47,48をハウジングとは別部材の強度の強い材料で構成する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
異常判定装置および車両用制御装置
【課題】舵角センサの診断における誤判定を抑えることを目的とする。
【解決手段】第1診断手段21は、舵角センサ92から取得した舵角の今回値と前回値との差の絶対値を変化量として算出する第1変化量算出部21Aと、正常閾値を記憶する第1記憶部21Bと、変化量が正常閾値を超えたときに、舵角の前回値を基準舵角に設定する基準舵角設定部21Cと、変化量が正常閾値を超えたときから第1の判定時間が経過するまでの間、正常閾値を徐々に増加させる増加部21Eと、第1の判定時間中、舵角と基準舵角との偏差と、正常閾値とを比較し、偏差が正常閾値よりも大きいときに第1カウンタ21Gをカウントアップ(カウント)する偏差比較部21Fと、第1カウンタ21Gが所定値に達すると舵角センサ92が異常であると判定する第1判定部21Hを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
21 - 40 / 523
[ Back to top ]