
Fターム[3D232DC09]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 計時手段(タイマー) (523)
Fターム[3D232DC09]に分類される特許
161 - 180 / 523
操舵支援装置

【課題】運転者のハンドル操作に応じた適切な操舵支援が行える操舵支援装置を提供すること。
【解決手段】車両の前方の走行路を撮像した画像に基づき車両が走行路に沿って走行するように操舵機構に操舵トルクを加える操舵支援装置であって、車両の運転者によるハンドル2の操作があったか否かを判断し、ハンドル2の操作があったと判断された場合、ハンドル操作がないと判断される場合と比べて操舵トルクの変化率の制限値を小さく設定する。これにより、ハンドル操作により運転者が違和感を覚えることを抑制することができ、適切な操舵支援が行える。
(もっと読む)
路面摩擦係数推定装置

【課題】幅広い運転領域で、レスポンス良く、精度の良い路面μを推定する。
【解決手段】路面μ推定装置10は、サンプリング時間が異なる複数のラック推力をラック推力推定値Fmsveとして検出し、このラック推力推定値Fmsveと同じタイミングで、基準とするラック推力(基準ラック推力)Fmdveを少なくとも路面μをパラメータとして含むタイヤモデルにより推定し、少なくともラック推力推定値Fmsveと基準ラック推力Fmdveとの偏差を最小とする路面μの値を最適化計算により求める。
(もっと読む)
タイヤ状態推定装置及びタイヤ状態推定方法
【課題】自動車両の動的挙動の安定化に資するべく、タイヤの状態を正確に推定すること。
【解決手段】タイヤ横力上限推定値、及び車両状態測定値に基づいてタイヤ横滑り角推定値を計算するタイヤ横滑り角推定器と、タイヤセルフアライニングトルク測定値、及び前記タイヤ横滑り角推定器によって計算された前記タイヤ横滑り角推定値に基づいて前記タイヤ横力上限推定値を計算する横力上限推定器と、によってタイヤ状態推定装置を構成する。
(もっと読む)
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 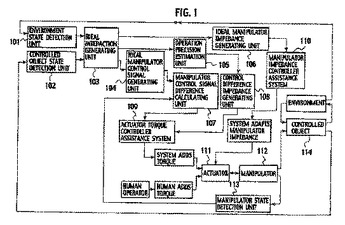 (もっと読む)
(もっと読む)
操舵支援装置
【課題】ドライバの運転意思に応じて制御方法を適切に変更する操舵支援装置を提供する。
【解決手段】自車両OVが走行車線に沿って走行するように操舵機構10に操舵力を付与する操舵支援装置を、自車両前方の環境を認識する環境認識手段110と、自車両の目標走行位置を設定する目標走行位置設定手段120と、自車両の横位置を認識する自車横位置認識手段130と、目標走行位置と自車両横位置との偏差に基づいて目標操舵力を設定する目標操舵力設定手段150と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段160と、操舵操作力を検出する操舵操作力検出手段23と、操舵操作力の履歴に基づいてドライバの運転意思を判定する運転意思判定手段140とを備え、目標操舵力設定手段は、運転意思低下状態が判定されたときに、自車両を目標走行位置に追従させる支援レベルを通常時よりも低下させた低支援レベル制御を実行する構成とする。
(もっと読む)
車線逸脱警報装置
【課題】運転者に違和感を与えることなくカーブ内側方向への車線からの逸脱を警告することができる車線逸脱警報装置を提供する。
【解決手段】車両3の車線からの逸脱を運転者に警告する車線逸脱警報装置であって、車線から逸脱するか否かを判定する逸脱状況判定部11と、車両3のハンドルに与える警報トルクの目標横加速度Gdecを算出する支援量演算部12と、逸脱状況判定部11により車線から逸脱すると判定した場合には、目標横加速度Gdecに基づいて警報トルクを付与する操舵装置31と、を備え、支援量演算部12は、直線車線での警報トルクの目標横加速度Gstraに対して減少量U0を与えてカーブ内側方向への車線逸脱を警告する警報トルクの目標横加速度Gdecとし、減少量U0を車両3がカーブを旋回するために必要な横加速度Gcirに基づいて算出することを特徴として構成する。
(もっと読む)
車両の操舵装置
【課題】 車両流れが発生したときに運転者が操舵ハンドルに入力する操作力を適切に低減することができる車両の操舵装置を提供すること。
【解決手段】 電子制御ユニット47は、車輪速センサ41、操舵角センサ42、回転角センサ43、横加速度センサ45およびヨーレートセンサ46から入力した各検出値に基づいて車両が直進走行状態であるか否かを判定する。この判定により、車両が直進走行状態であれば、電子制御ユニット47は、操舵トルクセンサ44によって検出された操舵(保舵)トルクTが、運転者が不快感を覚えるトルクとして予め設定された所定トルクαよりも大きいか否かを判定する。そして、操舵(保舵)トルクTが所定トルクαよりも大きければ、電子制御ユニット47は、操舵(保舵)トルクTが所定トルクα以下となるまで、EPSモータ33を駆動制御してアシスト力をラックバー32に付与する。
(もっと読む)
電動パワーステアリング装置
【課題】舵角中点学習を終了させることができないために正規の制御が行えずに操舵フィーリングが悪化した状態が長時間継続することを避ける。
【解決手段】補助操舵力を発生するモータ9と、舵角に基づいて、ステアリングホイールを中立位置に復帰させる所要の大きさの戻し力が得られるように、モータの補助操舵力を制御するステアリング制御装置21とを有し、この制御装置では、所定の舵角中点学習条件に基づいて舵角中点を確定する舵角中点学習が舵角中点学習部36にて行われ、これにより取得した舵角中点を基準にして制御を行うようになっており、特にここでは、舵角中点学習が開始から所定の時間を経過しても完了しない場合に、標準の舵角中点学習条件より緩和された舵角中点学習条件に基づいて舵角中点学習を行うようにする。
(もっと読む)
電動パワーステアリング装置
【課題】舵角中点学習が未終了の状態でも、ステアリングホイールを中立位置に復帰させる戻し力を十分に確保して、良好な操舵フィーリングを得る。
【解決手段】補助操舵力を発生するモータ9と、舵角及びヨーレイトに基づいて、ステアリングホイールを中立位置に復帰させる所要の大きさの戻し力が得られるように、モータ9の補助操舵力を制御するステアリング制御装置21とを有し、この制御装置では、所定の舵角中点学習条件に基づいて舵角中点を確定する舵角中点学習が舵角中点学習部36にて行われ、これにより取得した舵角中点を基準にして制御を行うようになっており、特にここでは、舵角中点学習が終了するまでの間、ヨーレイト反力制御部33から出力するヨーレイト補正値、すなわち戻し力中のヨーレイト成分が増大するように制御する。
(もっと読む)
舵角制御装置及び舵角制御方法
【課題】μスプリット路面上において車両姿勢を安定に維持でき、しかも車両がμスプリット路面から均一路面に入った場合に運転者が感じる違和感を低減できる舵角制御装置を提供する。
【解決手段】 車両が備える車輪の操舵を制御する舵角制御装置に、路面がμスプリット路面であるか否か判断すると共に、路面がμスプリット路面である場合、車両の前輪または後輪の舵角が、車両の重心回りに作用するヨーモーメントを打ち消すための目標カウンタ舵角になるように補正する前輪操舵コントローラ203と、左右の車輪の各々に加わる横力を検出するハブセンサ104と、前輪操舵コントローラ203による制御中、左右の車輪にかかる横力の差分に基づいてμスプリット路面でないと判断した場合、前輪操舵コントローラ203に対して制御の停止を指示する目標出力値生成部202と、を設ける。
(もっと読む)
電動パワーステアリング装置
【課題】故障診断処理がモータ電流制御にて途中で中断されるのを防止しつつ、モータ電流制御と故障診断処理とを一台の演算処理装置にて実行させる。
【解決手段】CPU22は、トルク指令生成処理22aおよび電流制御処理22bの優先度よりも故障診断処理22cの優先度を高くし、マイクロコントロールユニット21などの故障診断処理22cを所定の周期で実行しながら、トルク指令生成処理22aおよび電流制御処理22bを故障診断処理22cの合間に実行する。
(もっと読む)
車両退避装置
【課題】運転者がハンドルに倒れかかってしまうような状況などであっても適切に車両を誘導することができる車両退避装置を提供すること。
【解決手段】車両の運転者の状態の異常を検知する検知し(S10)、運転者の状態が異常である場合に操舵入力を無効とし(S20)、操舵入力を無効とした状態で操舵制御によって車両の進行方向を調整し車両を退避位置まで誘導する(S22)。これにより、運転者がハンドルに倒れかかっていたりハンドルを握っており操舵系を作動させにくい状態であっても、適切な車両の退避が行える。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】自車両側方の障害物の存在に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、障害物を検出するレーダ装置14L,14Rが走行車線に対して逸脱傾向が発生している方向で自車両の側方に位置する障害物を検出した場合(ステップS24)、切増し操作量判定用しきい値δovr_endを大きくすることで、運転者の操舵操作に対する車線逸脱防止制御の作動の抑制をしない方向に補正をする(ステップS25)。
(もっと読む)
車両の操舵装置
【課題】 前輪および後輪が転舵可能な車両において発生する操舵ハンドルの中立操作位置のずれを補正する車両の操舵装置を提供すること。
【解決手段】 電子制御ユニット26は、車速Vが所定の車速Vo以上のときに、操舵トルクTが所定の操舵トルクTo以下であり、かつ、操舵角θの変化量Δθが所定の操舵角θo以下となる状態で所定の時間to以上継続すれば、車両が直進走行していると判定する。また、車両が直進走行している状態で操舵ハンドル11の操舵角θが中立操作位置を表す「0」でなければ、操舵角θと前輪側転舵機構13におけるギア比とを用いて左右前輪FW1,FW2の転舵量と一致する左右後輪RW1,RW2の転舵量(転舵角)Sを算出する。そして、転舵量Sに対応する後輪RW1,RW2の制御中立転舵位置が絶対中立転舵位置となるまで電動モータ14を駆動制御して後輪RW1,RW2を転舵する。
(もっと読む)
車線逸脱防止装置
【課題】運転者の操作との干渉を低減するとともに車線逸脱を未然に防止する車線逸脱防止装置を提供する。
【解決手段】車線逸脱防止装置において、自車両前方の環境情報を取得して走行車線を設定する環境認識手段110と、走行車線内で自車両の目標走行位置を設定する目標走行位置設定手段120と、目標走行位置と自車両との横位置関係に基づいて自車両の前記走行車線からの逸脱傾向を判定する逸脱判定手段140と、逸脱傾向がないと判定された場合に目標走行位置からの自車両の横変位の増加に応じて横変位を低減する方向へ操舵力を付与する第1の制御モードと、逸脱傾向があると判定された場合にパルス状の操舵力を付与する第2の制御モードとを有する操舵制御手段180とを備える構成とする。
(もっと読む)
モータ制御装置
【課題】回転角の推定演算を必要時にのみ行うことができ、しかも、演算開始後速やかに妥当な推定回転角を得ることができ、これによって、演算負荷の低減を図りながらモータを適切に制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。この間、回転角推定部31は推定演算を停止している。レゾルバ2の故障が発生すると、探査電圧発生部26から探査電圧指令値が発生され、モータ1のステータは探査磁界を形成する。このときのトルクセンサ7の出力に基づいて、初期値決定部24が回転角推定部31の内部変数の初期値を決定する。この初期値を用いて、回転角推定部31が推定回転角θEを求める。この推定回転角θEを用いてモータ1が制御される。
(もっと読む)
車両の走行安全装置
【課題】、少なくとも2個の物体が検出されるとき、それらとの位置関係に応じてステアリング回避量を的確に算出するようにした車両の走行安全装置を提供する。
【解決手段】検出された物体を回避するのに必要なステアリング回避量などを算出し、算出値から警報作動距離などを算出し、相対距離未満のときに接触の可能性があると判定して警報装置などを作動させる(S10からS32)車両の走行安全装置において、第2の物体が検出されたとき、物体と第2の物体の自車幅方向における横相対距離を、自車の走行速度と自車長方向における自車と物体との距離と自車幅方向における自車と第2の物体との距離とに基づいて設定されるしきい値と比較し、横相対距離がしきい値を超えるとき、ステアリング回避量を物体に対して算出する一方、しきい値以下のとき、物体と第2の物体を1個の物体と見做して算出する(S14)。
(もっと読む)
車体流れ抑制装置
【課題】路面の横勾配による車体流れを抑制する制御の最適化を図る。
【解決手段】路面の横勾配による車体流れを抑制する車体流れ抑制装置1であって、所定の条件を満足したときに車体流れ状態であると検知する車体流れ検知部20を備え、車体流れ検知部20により車体流れ状態が検知されたときに車体流れを抑制する制御を行い、ナビゲーション装置8から得られる情報が、車体流れが発生し易い場所であることを示しているときには、前記条件を緩和する補正、または、車体流れ抑制制御の制御量を増大する補正を行う。
(もっと読む)
ドライビングシミュレータ、その制御方法およびその制御プログラム
【課題】異常が発生した場合であっても、ドライビングシミュレータ及びテストドライバの安全を確保することが可能となるドライビングシミュレータを提供する。
【解決手段】ドライビングシミュレータに、車輪を操舵するステアリングメカニズムと、前記ステアリングメカニズムの操舵に基づき仮想車両モデルの挙動を算出するとともに、該挙動に基づき操舵反力を表す指令信号を生成するシミュレーション部と、前記指令信号に対応した操舵反力を前記ステアリングメカニズムに印加するアクチュエータと、前記指令信号が所定の条件を満たす場合に、前記操舵反力を減少させる安全装置と、を備えさせた。
(もっと読む)
後輪操舵装置
【課題】 極低速走行時においても電動モータの消費電力を抑えつつ後輪を転舵できるようにする。
【解決手段】 ハンドル舵角θhから基本目標後輪転舵角δr0*(n)を算出する(S401)。左右後輪の車輪速センサの出力するパルス信号のカウント値Npl,Nprからタイヤ転がり距離Xを算出する(S402)。タイヤ転がり距離XにゲインGを乗じた値を許容舵角変化量G・Xとし、基本目標後輪転舵角δr0*(n)と直前回の目標後輪転舵角δr*(n-1)との偏差が許容舵角変化量G・Xより大きい場合には(S403:Yes)、直前回の目標後輪転舵角δr*(n-1)に許容舵角変化量G・Xを加算また減算して目標後輪転舵角δr*(n)を算出する(S406,S407)。
(もっと読む)
161 - 180 / 523
[ Back to top ]