
Fターム[3D232DC09]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 計時手段(タイマー) (523)
Fターム[3D232DC09]に分類される特許
121 - 140 / 523
電動パワーステアリング装置
【課題】電動パワーステアリング装置を制御する装置が有する記憶装置の不具合を診断する際の時間を短縮すること。
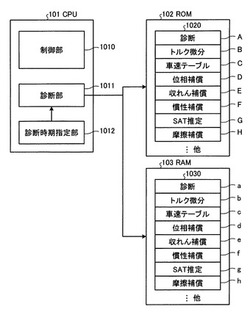
【解決手段】CPU101、ROM102、RAM103は、電動パワーステアリング装置の制御に用いられる。ROM102やRAM103は、電動パワーステアリング装置の制御に使用される情報を格納するとともに、複数のエリアに分割されている。複数のエリアは、電動パワーステアリング装置の制御における所定の処理単位毎に対応している。CPU101は、前記処理単位を実行するタイミングで、複数のエリアのうち、これから実行する処理単位に対応するエリアを診断する。また、CPU101は、前記処理単位を実行するタイミングでないときには、ROM102やRAM103に対する診断を実行しない。
(もっと読む)
走行制御装置

【課題】自車両の横方向の移動に関する走行制御を、先行車両の状態に応じて適切に行うことができる走行制御装置を提供する。
【解決手段】操舵制御装置1では、ECU7において先行車両位置情報に基づき操舵制御の制御量が算出され、算出された制御量で操舵制御が実行される。さらに、操舵制御装置1では、ミリ波レーダ6によって先行車両の自車両Cに対する車間距離が検出され、ECU7において、検出された車間距離に応じて操舵制御の目標制御量のゲイン値が変更される。つまり、操舵制御の目標制御量が、先行車両の状態に応じて変更される。
(もっと読む)
車両挙動制御装置
【課題】 挙動制御アクチュエータの作動量を検出するセンサが故障した場合においても、望ましくない車両挙動を発生させ難くした車両挙動制御装置を提供する。
【解決手段】 油圧センサ26が故障することで実際には存在しない油圧差ΔPが継続して算出された場合、フィードバック積分項Iiが徐々に増大して遂には上限値Ilimを超え、ステップS26の判定がYesになる。すると、ATTS−ECU16は、ステップS29でフィードバック積分項Iiを上限値Ilimとした後、ステップS27,S28に移行して駆動電流フィードバック項Ifbや目標駆動電流Itgtの算出を行う。これにより、駆動電流フィードバック項Ifb(すなわち、目標駆動電流Itgt)の無制限な増大が防止され、ATTS13の不適切な作動に起因する望ましくない車両挙動が抑制される。
(もっと読む)
車両挙動制御装置
【課題】 アクチュエータの作動遅れを補償するとともに、走行状態に適した応答性を実現できる車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS23で車速Vに所定の車速係数Kvを乗じて車速補正値Fcvを算出した後、ステップS24で路面μに所定のμ係数Kμを乗じてμ補正値Fcμを算出する。次に、ATTS−ECU16は、ステップS25で、フィルタ周波数ベース値Fbに対して車速補正値Fcvを減じるとともにμ補正値Fcμを加えることにより、可変ローパスフィルタ63のフィルタ周波数Ffを設定する。これにより、フィルタ周波数Ffは、車速Vが高くなるほど低くなり、路面μが高くなるほど高くなる。
(もっと読む)
ナビゲーション装置
【課題】電気自動車のバッテリ劣化を防止すると共に、そのために行うバッテリの放電エネルギーを有効に活用できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置7を、電気自動車1の駆動用モータ3を制御するモータ制御装置10と通信可能に構成し、制御装置22は、電気自動車1が走行停止となっている期間が所定の閾値を超えると、駆動用モータ3を空転させる指令をモータ制御装置10に出力する。そして、駆動用モータ3が空転しない又は滑らかに回転しない等の異常だと判断した場合は、表示装置や音声出力装置によりその旨の報知を行う。
(もっと読む)
車両運動制御システム
【課題】旋回運動の安定化制御の干渉を防止できる車両運動制御システムを低コストで提供することを目的とする。
【解決手段】車両運動制御システムは、駆動輪である左右前輪に異なる駆動力を配分することにより車両にヨーモーメントを発生させる左右駆動力配分装置と、車両の転舵輪である前輪の向きを変更する操向ハンドルの操作角θHに応じて後輪のトー角を変更する後輪トー角制御装置と、を少なくとも備える。左右駆動力配分装置は左右駆動力配分制御ECU37を有し、フィードフォワード部71とフィードバック制御部73と駆動力配分量制御状態モニタ部75を有している。駆動力配分量制御状態モニタ部75が、車両の旋回方向のヨーレイトを増加させる方向に作動しているときには、後輪トー角制御ECU36における第2補正部67は、操向ハンドルの操作角θHの向きと逆相に後輪のトー角を制御しない。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 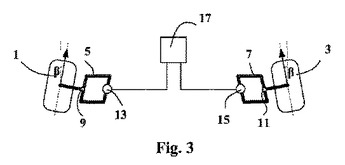 (もっと読む)
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ10が、回避制御を実行するべきと判定した時点における自車両1の運転者の車両操作量に基づいて回避制御の動作範囲を設定し、設定された回避制御の動作範囲内で自車両1が障害物Oと接触することを回避する走行経路を回避経路として算出し、算出された回避経路に沿って走行するように運転者の車両操作を支援する。これにより、個々の運転者によって異なる回避操作の許容範囲を反映した回避制御を行うことができるので、運転者が回避制御に対して感じる違和感を低減することができる。
(もっと読む)
車両用操舵装置、車両用操舵方法、車両用操舵装置付き車両
【課題】ステアリングホイールと機械的に切り離されたいわゆるステアバイワイヤを有する車両に於いて、操向輪の転舵角がステアリングホイールの操舵角に応じて制御できなくなった場合、システムがバックアップに切り替えられるが、この間、運転者に違和感を与えることのない車両用操舵装置を提供する。
【解決手段】ステアリングホイールと機械的に切り離された操向輪の転舵角が、ステアリングホイールの操舵角に応じて制御できなくなったとき、ステアリングホイールと操向輪との連結が完了するまでの間、操向輪の転舵角の制御ができなくなる直前の操向輪の転舵角状態に応じて、操向輪の転舵角を制御する。
(もっと読む)
車両舵角制御装置及び車両舵角制御方法
【課題】車両特性モードを切り替えた際における目標転舵角の急変を抑える。
【解決手段】車体速Vとステアリングホイール1の操舵角θとから推定する車両の走行状態に係る車両状態量に基づき目標ヨーレートおよび目標横速度を演算する。その演算した目標ヨーレートおよび目標横速度に基づいて操向輪の目標転舵角を演算する。その目標転舵角を目標値として、転舵アクチュエータを介して操向輪を転舵制御する。運転者の操作によって車両特性モードの選択切替を検出すると、一時的に、過渡特性に係る状態量を除いた車両状態量に基づき目標ヨーレートおよび目標横速度を演算する。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線Lの幅方向中央からそれぞれ幅方向左右に横変位基準位置LXL、LXRを設ける。そして、少なくとも左右の横変位基準位置LXL、LXR以内に自車両が位置する場合、ヨー角偏差が小さくなるように自車両をフィードバック制御する。また、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外に自車両がいる場合、上記角度偏差および横変位偏差が小さくなるようにフィードバック制御する。角度偏差及び横方向偏差の少なくとも一方の偏差に応じて、相対的に前輪の転舵方向に対する後輪の転舵方向の位相を制御する。
(もっと読む)
車両用操舵制御装置及び車両用操舵制御方法
【課題】路面カントが変動した場合であっても、片流れの抑制を適正に行うことができる車両用操舵制御装置及び車両用操舵制御方法を提供する。
【解決手段】運転者がハンドル6を把持した状態で、且つ車両が直進走行している状態であるとき、運転者の操舵力(操舵トルクT)が“0”となるように、操舵補助制御の電流指令値Iaを補正する(操舵トルク→0制御)。また、運転者がハンドル6に手を添えた状態で、且つ車両が非直進走行状態であるとき、車両の偏向量(ヨーレートY)が“0”となるように、操舵補助制御の電流指令値Iaを補正する(ヨーレート→0制御)。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電流検出部が故障した場合でも、モータの端子電圧とモータ電流推定値を用いて過熱保護を行うことにより、モータ電流検出部の故障や異常で危険な挙動に至ることがなく、ハンドル操舵のアシストを停止するがない場合には、モータ及びコントロールユニットの過熱保護を継続することが可能な電動パワーステアリング装置の制御装置を提供する。
【解決手段】操舵トルク及びモータ電流の検出値に基づいてモータ電流指令値を演算し、前記モータ電流指令値に基づき、モータ駆動回路によってモータを駆動し、操舵アシストを行う電動パワーステアリング装置の制御装置において、前記モータ電流の電流検出部の異常を検出するモータ電流異常検出部と、前記電流検出部の異常が検出されたときにモータ電流推定値を推定するモータ電流推定値演算部とを具備し、前記電流検出部の異常が検出されたときには前記モータ及びコントロールユニットの過熱保護を行っている前記モータ電流の検出値の代わりに前記モータ電流推定値を用いる。
(もっと読む)
後輪操舵制御装置
【課題】 後輪操舵車両の挙動が運転者に与える違和感を低減することができる後輪操舵制御装置を提供する。
【解決手段】 自動車Vの左右後輪5L,5Rを操舵制御する後輪操舵制御装置10L,10Rであって、乗員の運転操作と車両の運動状態量との少なくとも一方に基づき、目標後輪操舵量ベース値を設定する目標後輪操舵量ベース値設定部23と、前記車両の運転継続時間に基づき、制御ゲインを設定する制御ゲイン設定部25と、目標後輪操舵量ベース値と制御ゲインとに基づき、目標後輪操舵量を設定する目標後輪操舵量設定部26とを有することを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】正常に制御可能であればできるだけ制御を長く安全に継続することが可能な1CPU構成の制御系を有する電動パワーステアリング装置を提供する。
【解決手段】ROM102を2領域に分割し、第1および第2ROM領域の双方にアシスト制御機能(片方は簡易アシスト制御機能)を搭載し、さらに第1および第2ROM領域の双方にROM異常検出プログラム、RAM異常検出プログラム、WDTプログラムを搭載し、CPUは、起動時は、第1ROM領域に格納された通常アシスト制御プログラムを実行して通常の操舵制御を実行し、この通常の操舵制御の実行中に、ROM異常、RAM異常、WDT異常が検出された場合は、第2ROM領域に格納された簡易アシスト制御プログラムに切り替えて簡易アシスト制御を実行し、この簡易アシスト制御実行中に、ROM異常、RAM異常、WDT異常が検出されまでは、簡易アシスト制御を続行する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】トルク検出手段の一部に故障が発生するなどして、トルク検出手段のメイントルク信号とサブトルク信号の差が大きくなった場合においても、これら信号のうち正常信号を使用して、可能な限りアシスト制御を継続する。
【解決手段】メイントルク信号Vtmとサブトルク信号Vtsとを出力するトルクセンサ11において、メイントルク信号Vtmとサブトルク信号Vtsそれぞれのオフセットを検出し、通常はメイントルク信号に基づいてアシスト制御を行い、メイントルク信号Vtmとサブトルク信号Vtsの差が所定値を超えて所定の時間継続した場合に、トルクセンサ11に故障が発生したと判断して、小さい方のオフセットに対応するトルク信号を用いてアシスト制御を行う。
(もっと読む)
鞍乗り型車両のパワーステアリング装置
【課題】デフロック装置を備えた車両に設けられる電動パワーステアリング装置の温度上昇を抑制して、デフロック時以外で電動パワーステアリング装置の動作が制限されるのを防止する。
【解決手段】上端にステアリングハンドル16が取り付けられたステアリングシャフト17に連結されて操舵力を補助する補助力を発生させる電動パワーステアリング装置12と、ディファレンシャル装置63の差動状態および非差動状態(デフロック)を選択するデフロック手段とを備える。デフロックセンサ64によってデフロックが検出された時に、電動パワーステアリング装置12で発生される補助力の最大値を所定の制限値に低減させるECU100aを備える。ECU100aは、デフロックセンサ64によりデフロックが解除されたことを検出した時に補助力の最大値の制限を解除する。
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】運転者による障害物回避操作をより適切に支援できるようにすること。
【解決手段】障害物検出手段が、自車両の周囲の障害物の位置を検出する。また、存在確率分布推定手段が、検出した位置および障害物検出手段の特性により当該位置に含まれる検出誤差の性質に基づいて、自車両の周囲における障害物の存在確率分布を推定する。そして、回避支援手段が、推定した存在確率分布に基づいて、運転者による障害物回避操作を支援する。そのため、例えば、障害物検出手段の特性により検出結果に含まれる検出誤差、つまり、障害物の位置の検出誤差が大きい場合に、障害物の存在確率を低減することができる。そして、障害物回避操作の支援量を低減できる。その結果、運転者による障害物回避操作に当該回避操作の支援が干渉することを抑制できる。したがって、運転者による障害物回避操作をより適切に支援できるようになる。
(もっと読む)
車両走行支援装置及び車両走行支援方法
【課題】 必要に応じて予測した制御指令値を用いることにより高い精度で車両の運転操作を支援することができる車両走行支援装置等を提供する。
【解決手段】 第1制御指令値演算部22が所定の制御周期で第1制御指令値を演算し、将来状態予測部24が第1時刻における自車両運動状態及び障害物状態に基づいて第1時刻から所定時間後の第2時刻における自車両運動状態及び障害物状態を予測して、第2制御指令値演算部25が予測された第2時刻における自車両運動状態及び障害物状態に基づいて、第2時刻以降の第2制御指令値を演算する。予測適切度評価部23は、予測された自車両運動状態及び障害物状態と実際の自車両運動状態及び障害物状態とを比較して予測適切度を判定し、制御指令値出力処理部26は、予測適切度に基づいて第2時刻以降の実際の制御指令値として第1又は第2制御指令値を出力する。
(もっと読む)
車両のステアリング装置
【課題】電動モータの1相が通電不良となり2相通電駆動する場合に、振動を防止しつつ電動モータを良好に回転させる。
【解決手段】2相通電指令部117は、電動モータ31への通電不良が1相だけ発生しているときに、通電不良が発生していない2相を使って電気角θeの変化に対して変動しない操舵アシストトルクを発生するための理論上の2相通電用電流演算式と、電動モータ31の上限電流を規定する最大電流と、2相通電用電流演算式における電気角θeを進める進角量とに基づいて、2相通電用の指令電流を演算する。舵角比変更指令部120は、電動モータ31が振動状態となった場合、舵角比可変装置に舵角比変更指令を出力する。これにより、電動モータ31の回転位置が変化して振動が停止する。
(もっと読む)
121 - 140 / 523
[ Back to top ]