
Fターム[3D232EB12]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵力 (2,579) | 操舵反力 (698)
Fターム[3D232EB12]に分類される特許
1 - 20 / 698
車両用操舵装置
車両用操舵装置
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
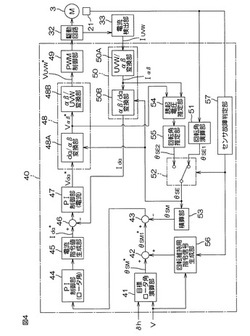
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両用操舵装置

【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
車両用操舵装置
【課題】簡単な構造で安価に操舵反力を発生できる車両用操舵装置を提供すること。
【解決手段】例えば左操舵される操舵部材2によって伝達機構14を介して第1回転方向X1に駆動された空気圧縮機5が、第1ポート51を吸込口とし、第2ポート52を吐出口とする。空気供給口24からの空気が、吸込口となっている第1ポート51に供給される。吐出口になっている第2ポート52から吐出された圧縮空気は、第2可変絞り20、第2逆止弁18、高圧部16aの分岐部29、上流側還流路30、方向制御弁28および第1下流側還流路32を介して、吸込口となっている第1ポート51に還流される。操舵部材2に、空気圧縮機5の駆動の反力による操舵反力が付与される。
(もっと読む)
車両操舵装置
【課題】ステアバイワイヤ装置のフェール時に十分な車両の運動を確保するための車両操舵装置を提供する。
【解決手段】ステアバイワイヤ装置12により転舵する第1の車輪2と、運転者のための操作部材5との機械的連結により転舵する第2の車輪3と、を備える車両1のための車両操舵装置10は、操作部材5への入力により回転可能に操作部材5に連結されている回転軸32と、回転軸32の回転可能範囲を制限するための回転角抑制機構34と、を備える。回転角抑制機構34は、ステアバイワイヤ装置12のフェール時に回転可能範囲を超える回転を回転軸32に許容するよう構成されている。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
車両の操舵制御装置及び操舵制御方法
【課題】転舵モータの過熱時に操舵輪と転舵輪とを機械的に結合しても、運転者が負担する操舵トルクの増加を抑制することが可能な、車両の操舵制御装置及び操舵制御方法を提供する。
【解決手段】操舵輪32の操作に基づいて転舵輪24を転舵させる転舵モータ2の温度が、予め設定したクラッチ締結温度を超えているか否かを判定し、転舵モータ2の温度がクラッチ締結温度を超えていると判定すると、操舵輪32と転舵輪24との間のトルク伝達経路を機械的に分離する開放状態にあるクラッチ6を、トルク伝達経路を機械的に連結した締結状態に切り換えた後も、操舵輪32の操作に応じた目標転舵角を算出し、この算出した目標転舵角に応じて転舵トルクを制御する転舵モータ2の駆動制御を継続させる。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法
【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
車両用操舵装置
【課題】ステアリングギア比を車速に応じて変化させる場合であっても、ドライバに対し、車速に関係なく適切な操舵量をイメージさせる。
【解決手段】車速Vに基づきステアリングギア比Gおよび転舵角δを算出し(ステップS1、S2)、さらに車速Vおよび操舵角θに応じた操舵反力成分T(V,θ)と、フリクション成分Tfと、操舵角速度θ′に応じた操舵反力成分T(θ′)との和から操舵反力Tを演算し(ステップS3〜S8)、操舵反力成分T(V,θ)を、車速Vが大きいときほど小さな値となる特性とする。車速Vが大きいときほど操舵反力Tは抑制されるため、ステアリングギア比を車速に応じてステアリングギア比が大きくなる特性とした場合でも、ステアリングホイール1に付与される操舵反力は車速に関係なくほぼ同等程度となる。そのためドライバは操舵量をイメージしやすくなり、的確な操舵を行うことができる。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角が大きな範囲は、転舵速度に基づく操舵制御を実行することにより運転者の操舵負担を減らす。
【解決手段】タイヤを転舵させる転舵駆動機構と、操舵部材の操舵角を検出する操舵角センサと、操舵角が所定の切替角αを越える高角領域にあるか否かを判定し、操舵角が高角領域にあるとき操舵角センサで検出した操舵角の増減を判定する切り込み/切り戻し判定処理部(B3)と、操舵角が高角領域で増加傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が増大するように転舵駆動機構を制御し、操舵角が高角領域で減少傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が減少するように転舵駆動機構を制御するための目標転舵角を算出する目標転舵角算出処理部(B4)とを備える。
(もっと読む)
車両用操舵装置および操舵制御方法
【課題】ステアバイワイヤシステムにおいて付与する操舵反力をより適切なものとすること。
【解決手段】操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、ステアバイワイヤシステムにおける操舵反力用モータ5aの駆動制御を行う操舵反力用モータ制御手段とを有する車両用操舵装置とした。
(もっと読む)
1 - 20 / 698
[ Back to top ]