
Fターム[3D232EB22]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | コーナリングパワ、コーナリングフォース (43)
Fターム[3D232EB22]に分類される特許
1 - 20 / 43
路面摩擦係数推定装置及び方法

【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
電動パワーステアリング装置

【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
後輪トー角制御装置および電動アクチュエータの基準作動量設定方法
【課題】後輪トー角制御装置が設置された後輪のホイールアライメントを容易に調整できるようにする。
【解決手段】ECU12は、後輪トー角δrが0となる電動アクチュエータ11の基準ストローク量S0を設定する基準ストローク量設定部22と、ストロークセンサ16で検出したストローク量検出値Sdtcと基準ストローク量S0とから後輪トー角検出値δrdtcを算出する後輪トー角検出値算出部23とを備える。ECU12は、基準ストローク量設定制御を行った場合、左右の後輪5を対称にした後(ステップS1)、アクセル開度を一定にした状態で左右の後輪5を対称状態に保持したまま左右の電動アクチュエータを駆動し(ステップS3)、車速vが最大となったストローク量検出値Sdtcを基準ストローク量S0として設定する(ステップS5)。
(もっと読む)
車両の制御装置
【課題】 操舵に対する逆ロールの応答性を確保でき、制動力を向上させることができる車両の制御装置を提供すること。
【解決手段】 旋回方向内側への横移動の反力、あるいは車体の逆ロールによって、車両が受ける反力ロールモーメントを算出する反力ロールモーメント算出部104と、反力ロールモーメントを抑制する平面運動アクチュエータ部108の平面運動制御量目標値を設定する平面運動制御量目標値算出部105と、算出した平面運動制御量目標値に基づいて、平面運動アクチュエータ部108を制御する平面運動制御部106を備えた。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 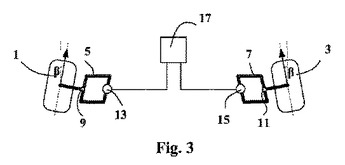 (もっと読む)
(もっと読む)
駆動制御システム
本発明は、自動車、ボート、航空機など、またはビデオゲームのコンソール、シミュレーション装置などの運転シミュレータの車両駆動制御システム(1)に関し、ステアリングホイール、舵などの方向制御デバイス(2)を備え、指向手段(21′、22′、21″、22″)を備え、前記システム(1)は、前記方向制御デバイス(2)の位置を検出するための手段(6)と、フレームを有し、前記方向制御デバイス(2)の動作に対する抵抗を調節するのに適している受動的アクチュエータおよび調節手段(8′、8″、8a、8a′、8b、8b′)を備える前記方向制御デバイス(2)と機械的に連結する調節モジュール(7、7′、7″)と、前記指向手段(21′、22′、21″、22″)の位置を検出するための1つまたは複数のセンサー(27)と、前記検出手段(6)によって検出された前記方向制御デバイス(2)の位置に基づいて、前記受動的アクチュエータまたは調節手段(8′8″、8a、8a′、8b、8b′)による前記方向制御デバイス(2)の動作に対する抵抗を適切に較正し、前記指向手段および前記センサー(27)によって前記車両またはシミュレータの方向を制御する、少なくとも1つの中央制御装置(23)とを含むことを特徴とする。  (もっと読む)
(もっと読む)
ヨーレート制御装置
【課題】車両がバンクのあるカーブ路を走行する場合に、運転者の違和感を低減できるヨーレート制御装置を提供する。
【解決手段】規範ヨーレートYrefと実ヨーレートの偏差に応じた駆動力配分制御量Imを算出し、バンク走行検出部10が推定するバンク角度βの絶対値が所定値より大きくなった場合は、バンク角度βの絶対値の大きさに対応したバンク角補正ゲインBgを算出して駆動力配分制御量Imに乗算し、駆動力配分制御量Imを低減するECU30を備えるヨーレート制御装置とする。
(もっと読む)
車両挙動制御装置
【課題】摩擦円の影響が小さい緩加速時やアクセルオフ等での不必要な車両制御を防止して、違和感無く自然で扱いやすい車両挙動を実現すると共に、各輪のグリップ状態を監視して、必要な運転領域では確実に、限界領域における車両挙動の安定性を確保する。
【解決手段】制御部50は、前後軸の接地荷重に基づく第1のステア特性量A1と摩擦円の限界を考慮した第2のステア特性量A2を演算し、A1≧A2の場合は、エンジントルク制御、及び、舵角制御を禁止する。また、A1<A2の場合は、第1のステア特性量A1と第2のステア特性量A2の差分を考慮した、エンジントルク制御、及び、舵角制御を実行する。
(もっと読む)
車両制御装置
【課題】カーブなどにおいて車両の道路逸脱の可能性を抑制するとともに運転者の操舵に関する意思も十分に考慮する車両制御装置を提供する。
【解決手段】旋回状態変更指令に基づいて旋回状態を変更する旋回状態変更機構を備えた車両制御装置。車両の進行方向に存在するカーブの形状を含むカーブ特性情報と、運転者の視線に関する視線情報とを入力して、これらの情報に基づいて旋回状態変更機構1へ旋回状態変更指令を出力するカーブ走行評価手段50が備えられている。
(もっと読む)
ロール角推定装置、及び電動パワーステアリング装置
【課題】一般乗用車に装備されやすいセンサを利用し、車体のロール角φを高精度に推定する。
【解決手段】例えばマルチ荷重センサ12により、左右輪に作用する垂直荷重WL及びWR、並びに横力FL及びFRを検出する。そして、左右輪に作用する垂直荷重WL及びWRに応じて、左右輪の荷重移動量ΔWを算出し、この荷重移動量ΔW、並びに横力FL及びFRに応じて、車体のロール角φを推定する。より正確に車体のロール角φを推定したければ、横力における、車輪進行方向に対する直角方向成分、つまりコーナリングフォースFcFL〜FcRRを用いる。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態を速やかに解消させることができる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態になると、グリップ力回復制御が実行される。すなわち、転舵輪である前輪の転舵角σは、その絶対値が一時的に小さくなるように調整される。また、前輪に対する駆動力Dは、グリップ力回復制御の実行によって転舵角σが最小転舵角σminになった時点では、前輪の回転状態に応じて増加又は減少されている(第1経過時間t1)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第2経過時間t2)。また、前輪に対する駆動力Dは、グリップ力回復制御の実行直前の駆動力Dとなるように再び調整される(第3経過時間t3)。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪にコーナリングパワーの差が生じた場合にも安定したステアリング特性を維持する。
【解決手段】左右の後輪5l,5rに対して電動アクチュエータ11l,11rをそれぞれ有する後輪トー角可変式の自動車Vに設けられ、電動アクチュエータ11の駆動制御に供される後輪トー角制御装置10において、左右の後輪5l,5rのコーナリングパワーを検出する手段として、タイヤ空気圧判定部23およびタイヤ種類判定部24を備え、タイヤ空気圧判定部23およびタイヤ種類判定部24によって一方の後輪5にコーナリングパワーの低下が判定された場合、他方の後輪5のトー角θを、スリップ角αが大きくなる向きに補正する。
(もっと読む)
旋回制御装置及び旋回制御方法
【課題】車両を旋回させる際に消費されるエネルギーを小さくすることができ、車両の旋回時の応答性を必要に応じて高くすることができるようにする。
【解決手段】ボディと、車輪WLF、WRF、WLB、WRBと、車輪にキャンバ角を付与する車輪駆動部と、運転者が車両を旋回させる際に必要とする旋回の要求度を表す要求ヨーレートを算出する要求ヨーレート算出処理手段と、要求ヨーレートが基準値以上であるかどうかを判断する要求ヨーレート判定処理手段と、要求ヨーレートが基準値以上である場合に、車輪にスリップ角を付与するスリップ角付与処理手段と、要求ヨーレートが基準値より小さい場合に、車輪にキャンバ角を付与するキャンバ角付与処理手段とを有する。要求ヨーレートが基準値以上である場合に、スリップ角を大きくすることができ、要求ヨーレートが基準値より小さい場合に、コーナリング抵抗を小さくすることができる。
(もっと読む)
車両走行状態推定装置
【課題】 車両挙動急変時にも精度良く車両挙動を推定することができる車両走行状態推定装置を提供すること。
【解決手段】 車両モデルに基づいてタイヤスリップ角を演算する車両挙動手段と、車輪の横力相当物理量とタイヤスリップ角からコーナリングスティフネスを演算するコーナリングスティフネス演算手段と、コーナリングスティフネスの演算値の演算値の発散を防止する発散防止手段とを設け、車両挙動演算手段はコーナリングスティフネスによって車両モデルを補正するようにした。
(もっと読む)
車両走行状態推定装置
【課題】 車両挙動急変時にも精度良く車両挙動を推定することができる車両走行状態推定装置を提供すること。
【解決手段】 車両モデルに基づいてタイヤスリップ角を演算する車両挙動演算手段と、車輪の横力相当物理量とタイヤスリップ角からコーナリングスティフネスを演算するコーナリングスティフネス演算手段とを設け、車両挙動演算手段は、コーナリングスティフネスによって車両モデルを補正するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】タイヤのグリップが失われ始めることを運転者に感知させることができると共に、タイヤのグリップ限界に近づいたときに運転者の切増し操舵を抑制する。
【解決手段】グリップロス度検出部23で、セルフアライニングトルク検出値SATdとセルフアライニングトルク推定値SATpとに基づいて、タイヤのグリップが失われた度合を表すグリップロス度gを検出すると共に、アクティブリターン補償部40で、車速Vx、操舵角δ及び舵角速度ωhに基づいて操舵補助電流指令値Irefに対するアクティブリターン補償値HRを算出し、補償値補正部24で、グリップロス度gに基づいてアクティブリターン補償値HRを補正する。
(もっと読む)
車両運動制御装置
【課題】 車両に発生するヨーモーメントを抑制し、車両の操縦安定性の向上を図ることができる車両運動制御装置を提供する。
【解決手段】 車両運動制御装置1の取得部26は、車両の操縦安定性の低下の原因であるキングピン軸モーメントを取得する。また、算出部27は、キングピン軸モーメントを打ち消す反キングピン軸モーメント発生させるような後輪の舵角量を算出する。さらに、後輪舵角制御部31は、この舵角量に基づいて後輪の操舵機構を制御する。これにより、車両に発生するキングピン軸モーメントを抑制することができるので、車両の操縦安定性の向上を図ることが可能となる。
(もっと読む)
車両挙動制御装置
【課題】複数の車両運動制御装置を用いて運動を協調制御させるに際し、各車輪のタイヤの荷重状態に応じて適切に所望の運動を実現させるタイヤ発生力を算出して無駄なエネルギ消費を抑える。
【解決手段】車輪3のタイヤ横力Fyおよびタイヤ前後力Fxを個別に可変制御することによって車両の挙動を制御する車両挙動制御装置10において、車輪のタイヤ横力とタイヤ前後力との制御割合を設定する制御割合設定部30と、運転者による運転操作量から目標ヨーレイトγTを算出する目標ヨーレイト算出部27と、車輪の実舵角から規範ヨーレイトγT0を算出する規範ヨーレイト算出部29とを備え、制御割合設定部30は、目標ヨーレイト算出部によって算出された目標ヨーレイトと規範ヨーレイト算出部によって算出された規範ヨーレイトとの差Δγが小さいほど、タイヤ前後力の制御割合を小さくするように構成する。
(もっと読む)
電動パワーステアリング装置
【課題】車両応答の悪化を抑制しつつ、操舵フィーリングの悪化をも防ぐ。
【解決手段】車両転舵制御装置(10)は、ドライバの操舵入力に応じた操舵トルク及び操舵角の少なくとも一方に基づいて、操舵入力を補助するためのアシスト操舵力を算出する第1算出手段(30)と、アシスト制御力を操舵入力における操舵トルクに付与する操舵力付与手段(10)と、アシスト操舵力を付与された操舵トルクに対する車両挙動又は操舵入力における操舵角の特性が、(i)操舵入力における操舵周波数fが所定値以下となる範囲のうちの少なくとも一部において、操舵周波数fが所定値以下となる範囲のうちの他の一部における操舵トルクに対する車両挙動又は操舵角の特性よりも増大し、且つ、(ii)操舵周波数fが所定値以上となる範囲において、操舵周波数fが大きくなるほど低減するように、第1算出手段を制御する操舵力制御手段(30)とを備える。
(もっと読む)
1 - 20 / 43
[ Back to top ]