
Fターム[3D232FF03]の内容
走行状態に応じる操向制御 (73,124) | 他の制御システムとの関連 (1,978) | 車両懸架装置 (202)
Fターム[3D232FF03]の下位に属するFターム
ホイルアライメント調整 (32)
Fターム[3D232FF03]に分類される特許
1 - 20 / 170
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
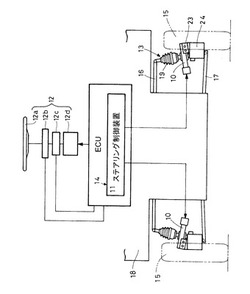
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
車体傾動制御装置、車体傾動制御方法

【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
乗用車両
【課題】車両の走行中に操舵した際の車両姿勢をより安定化することができる乗用車両を提供する。
【解決手段】フレーム部材11に対して回動自在に連結され左右方向に並設された対の支持部材31と、該両支持部材31に配設された対の後輪33とを備え、電気的駆動手段により走行駆動される乗用車両において、フレーム部材11に対する両支持部材31の回動角度をそれぞれ変化させて両後輪33の進行方向における位置を変化させる対の車輪位置駆動手段30とを備え、ハンドル12の操舵時に両車輪位置駆動手段30の片側のみを駆動して、両後輪33の進行方向における位置を互いに異なるように変化させる。
(もっと読む)
操舵装置及びキックバック判定装置
【課題】適正にキックバックに対応することができる操舵装置及びキックバック判定装置を提供することを目的とする。
【解決手段】車両に設けられ回転操作することで操舵可能である操舵部材2と、前記操舵部材2の操舵角度と前記操舵部材2に作用する操舵トルクとに応じて定まる動作点が予め設定される判定領域外にある場合に、キックバック発生状態であると判定する判定装置8とを備えることを特徴とする。したがって、操舵装置、キックバック判定装置は、適正にキックバックに対応することができる。
(もっと読む)
車両制御装置
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車両の統合制御装置
【課題】自動操舵機構の有する過渡時における応答性の問題を適切に補償して、通常走行時の快適性を保つことはもちろん、理想のハンドリング性能を実現する。
【解決手段】制御ユニット50の操舵制御部20では、ハンドル角θHd、ハンドル角速度(dθHd/dt)により目標舵角δtを算出し、モータ回転角θMを算出して、このモータ回転角θMを、ギヤ、モータの慣性等に起因する振動を抑制する為、所定のローパスフィルタによる処理や不感帯処理を行って、モータ駆動部21に出力する。サス_ECU40では、ハンドル角速度(dθHd/dt)に基づいて、減衰力補正基本値Cpを設定し、減衰力補正値Cを算出して、ストローク速度(dST/dt)、減衰力補正値Cを基に減衰力Faを設定し、所定のローパスフィルタによる処理等を行って出力する。
(もっと読む)
操舵装置及び操舵制御装置
【課題】状態に応じて運転感覚を変えることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ回転操作可能である操舵部材2と、操舵部材2の回転方向の振動を調節可能である調節装置6と、車両の運転状態に応じて調節装置6を制御して操舵部材2の回転方向の振動を調節する制御を実行可能である操舵制御装置8と備えることを特徴とするので、状態に応じて運転感覚を変えることができる。調節装置6は、例えば、操舵部材2に伝達される振動の伝達度合いを調節可能であり、操舵制御装置8は、例えば、操舵部材2に伝達される振動の伝達度合いを調節することで操舵部材2の回転方向の振動を調節することができる。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
車両用制御装置
【課題】燃費の悪化や車輪の偏摩耗が生じることを防ぐと共に、車両の走行安定性を向上させることのできる車両用制御装置を提供すること。
【解決手段】車両用制御装置100は、スリップ角に対するセルフアライニングトルクを角度で微分した角度微分値が所定の第1閾値以下であるかを判断し、角度微分値が第1閾値以下であると判断される場合に車輪のキャンバ角を調整する第1キャンバ角調整手段を備えているので、横力が飽和してグリップ力の限界に近付くことを予測し、車輪のグリップ力が限界を超える前にキャンバスラストを発生させて、著しいアンダーステア傾向、オーバーステア傾向やスピンなどの発生を未然に防止することができる。これにより、車両の走行安定性を向上させることができると共に、長時間に亘ってキャンバ角が付与されることによる燃費の悪化や車輪の偏摩耗が生じることを防止できる。
(もっと読む)
車両用電源制御装置
【課題】本発明は、限りある供給可能電力を有効利用することができる、車両用電源制御装置の提供を目的とする。
【解決手段】車両に搭載される複数の電気負荷(電動パワステ1や電動スタビ2など)と、これらの電気負荷に対して電力を供給するバッテリ10やオルタネータ12とを備え、ドライバーの視線を検出する視線検出装置20や道路情報を有するナビゲーション装置21などによって取得可能なこれらの電気負荷の作動を予知させる予兆情報に基づいて、これらの電気負荷の作動に伴う電力需要を推定し、その推定結果に応じてこれらの電気負荷のそれぞれに対するバッテリ10等からの電力供給を調整することを特徴とする、車両用電源制御装置。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
操舵装置
【課題】操舵フィーリングに対する違和感を運転者に与えることを抑制することができる操舵装置を提供すること。
【解決手段】前輪11側のロール剛性あるいは後輪12側のロール剛性の少なくともいずれか一方を制御でき、制御により前輪側のロール剛性と後輪側のロール剛性とのロール剛性の比を可変に設定可能なロール剛性制御手段を備えた車両1に設けられ、運転者により操舵用の操作部材15に入力される操舵力を補助する補助力を出力し、操舵力と補助力とにより操作部材と機械的に接続された前輪を転舵する操舵装置2であって、補助力は、ロール剛性の比に基づいて変化する。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
1 - 20 / 170
[ Back to top ]