
Fターム[3D244AA24]の内容
Fターム[3D244AA24]の下位に属するFターム
追突防止、車間距離保持 (389)
急加減速、暴走防止 (38)
システムのフェイルセーフ (12)
検出部の信頼性向上 (18)
故障診断 (3)
警報 (134)
誤操作対策 (14)
Fターム[3D244AA24]に分類される特許
61 - 65 / 65
車線逸脱防止装置

【課題】運転者の心的負荷を抑えつつ、走行車線からの逸脱を防止できる。
【解決手段】車線逸脱防止装置は、感圧センサ24のセンサ値からRRI値を得て、このRRIに基づいて運転者の心的負荷を計測し(ステップS3)、その計測値に基づいて運転者の心的負荷が高まっている場合、逸脱傾向の判断に用いる設定時間TTLCを大きい値に変更する(ステップS4、ステップS5)。これにより、車線逸脱防止制御の介入時期を早くする。また、運転者の心的負荷が高まっている場合、車線逸脱防止制御のために自車両に付与するヨーモーメントや減速を小さくする。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置

【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
車間距離制御装置
【課題】降雨等により車間距離検出性能が低下した状態でも、自車両が先行車両に対し目標車間距離より接近するのを抑えるようにすることが可能な車間距離制御装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を用いて測定した先行車両と自車両との車間距離が限界車間距離以内にある場合には車間距離が目標車間距離となるように制御し、車間距離が限界車間距離を超える場合には車間距離制御を解除する車間距離制御装置100で、雨量検知センサ17により測定した雨量の増大に伴い、限界車間距離は短くなるように変更されるようにした。
(もっと読む)
運転支援方法およびシステム
【課題】
省エネルギー、排ガス汚染の防止、および交差点での安全走行を目的とした、交差点での車両のノンストップ通過の実現。
【解決手段】
交差点の手前一定距離Dの地点Pにおいて前記交差点の信号状態情報、前記距離D情報および前記通信領域−交差点間の許容最高速度情報から、交差点をノンストップで通過するための前記地点P−交差点間の推奨所要時間 、推奨走行速度 を演算し、車両側では前記交差点までの間を前記推奨走行速度で走行することによって交差点ノンストップ通過を実現する。
(もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 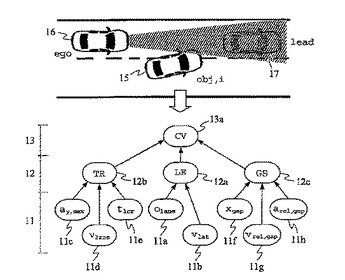 (もっと読む)
(もっと読む)
61 - 65 / 65
[ Back to top ]