
Fターム[3D244AA27]の内容
定速走行制御 (7,912) | 目的 (1,793) | 危険回避、安全性向上 (673) | 急加減速、暴走防止 (38)
Fターム[3D244AA27]に分類される特許
1 - 20 / 38
先行車追従走行装置及び運転支援システム
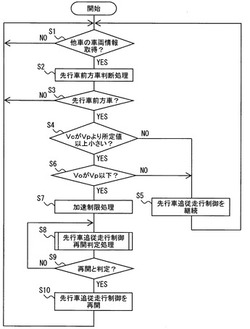
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
走行制御システム、制御プログラム、記録媒体

【課題】先行車両への追突を回避可能である安全な走行制御と、自車両に急激な速度変化が生じることのない乗り心地の良好な走行制御とを両立して実現できる走行制御システムを提供する。
【解決手段】走行制御システムは、自車両が現時刻の先行車両の位置に到達するまでの到達時間を分割することで複数の予測区間を設定して(ステップS105)、到達時間の経過時点における自車両の目標加速度を各予測区間毎に算出する(ステップS107)。そして、各予測区間における自車両の予測加速度や、連続する2つの予測区間における操作変化量を入力値とする評価関数を作成して(ステップS108)、評価関数の出力値が最小となる入力値を求める一般化予測制御に基づき、各予測区間における自車両の加速度を取得して(ステップS109)、取得値に現時刻以降の自車両の加速度を制御する(ステップS110)。
(もっと読む)
走行支援装置
【課題】本発明は、他車両の走行状態に基づいて自車両の適切な加速度を設定する走行支援装置を提供することを課題とする。
【解決手段】車車間通信で取得した他車両の走行状態に基づいて自車両の目標速度を設定する走行支援装置1であって、車車間通信で走行状態を取得できた他車両の台数の増加に応じて大きな加速度を設定する加速度設定手段51と、加速度設定手段51で設定した加速度に基づいて目標速度を設定する目標速度設定手段51を備えることを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】周囲環境に対する迷惑を抑制しつつ燃費を向上することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置1は、自車両10の周囲環境を検出するためのミリ波レーダ2,3と、ミリ波レーダ2,3で検出された周辺環境に応じて自車両10の走行を制御するECU4とを備えている。この車両用走行制御装置1では、ミリ波レーダ3で後続車両が検出されない場合には、速度範囲E内でエンジン11駆動による加速走行及びエンジン11停止による減速走行が繰り返されるような燃費走行で自車両10が走行され、燃費向上が実現される。一方、ミリ波レーダ3で後続車両が検出された場合には、加減速走行が行われない通常走行で自車両10が走行され、後続車両に対する迷惑が抑制される。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、ACC制御の実行中に、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に、先行車が存在するときは、車間制御ECU20及びブレーキ制御ECU42は先行車の減速度に応じて自車両を減速させる。これにより、運転者が居眠り等の状態にないにも関わらず、運転者の意図に反して速度が低下することが少なくなり、安全性を確保しつつ運転者に与える違和感を軽減することが可能となる。
(もっと読む)
車間距離制御装置
【課題】自車両が被牽引車両を牽引する場合に安全な制動距離を確保することができると共に、走行安定性を高めることができる車間距離制御装置を提供すること。
【解決手段】自車両と先行車両との車間距離を制御する車間距離制御装置10において、自車両が被牽引車両を牽引しているか否かを判定する判定手段12と、自車両と先行車両との目標車間距離を判定手段12の判定結果に応じて決定する車間距離決定手段14と、自車両の目標加減速度を判定手段12の判定結果に応じて決定する加減速度決定手段16と、目標車間距離及び目標加減速度に基づいて自車両を制御する制御手段18とを備える。
(もっと読む)
車速制御装置、車速制御方法
【課題】ACCキャンセル時の運転者の意図に応じてスピードリミッタの上限車速を変更する車速制御装置及び車速制御方法を提供すること。
【解決手段】補足された先行車両に追従走行する追従走行手段24、25と、アクセルペダル14が踏み込まれても予め設定した上限車速により車速を制限する上限車速制限手段23と、を有する車速制御装置100であって、先行車両との相対速度を検出する相対速度検出手段12と、自車両の車速を検出する自車両速度検出手段11と、車両の減速操作により追従走行手段24、25が解除された際に、減速度の大きさから運転者の意志により追従走行手段が解除されたか否かを判定する判定手段27と、運転者の意志により追従走行手段が解除されたと判定された場合、上限車速を先行車両の車速以下に設定する上限車速変更手段21と、を有することを特徴とする。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
車速制限制御装置
【課題】制限車速の変化速度決定処理が走行抵抗による影響を受けることなく、制限車速変更操作に対する再現性が確保され得るようにした車速制限制御装置を提案する。
【解決手段】t1から「SET」スイッチの短時間操作を6回繰り返したことにより、制限車速指令値tLmtVSPが変更前制限車速指令値tLmtVSP (0)からPitch=「1Km/h」の小ピッチずつ6回上昇された場合の制限車速LmtVSPの変更速度を以下のように決定する。現在の制限車速指令値tLmtVSPおよび変更前制限車速指令値tLmtVSP(0)間の制限車速指令値段差ΔtLmtVSPが設定値ΔtLmtVSP(2)に到達するt2までは、制限車速LmtVSPの時間変化割合を小さなγにし、t2以降は、ΔtLmtVSP≧ΔtLmtVSP(2)であるから、LmtVSPの時間変化割合を大きなβにし、制限車速LmtVSPを実線図示のごとき速度(γ,β)制御下で変更後制限車速指令値tLmtVSP に至らしめる。
(もっと読む)
ペダル反力制御装置
【課題】車両の自動走行時の走行状態に応じて運転者の加速意思を車両の走行挙動に適切に反映させる。
【解決手段】運転者によるアクセル操作を必要とせずに、先行車両に追従する追従走行または目標速度での定速走行による自動走行可能な車両に搭載され、車両の自動走行時にアクセルペダルのフットレスト位置においてペダル反力を増大させるペダル反力制御装置10は、自動走行として追従走行が設定されたときに、フットレスト位置に第1位置を設定すると共にフットレスト位置でのペダル反力に第1反力を設定し、自動走行として定速走行が設定されたときに、フットレスト位置に第1位置よりも浅い第2位置を設定すると共にフットレスト位置でのペダル反力に第1反力よりも小さな第2反力を設定する。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】定速クルーズ走行中、運転者に違和感を覚えさせない車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】アクセルペダル12に対する反力Frを急増させるペダル操作量Pを、車両100が走行している際の目標スロットル弁開度θtと基準スロットル弁開度θrとの差D1、D2に応じて変化させる。これにより、車両100が坂道に差し掛かった等、車両100に対する外的負荷が変わったため、クルーズ速度Vcrを維持するためにエンジン30の出力を増減させる場合、前記外的負荷に応じてペダル操作量Pを変化させることができる。その結果、エンジン30の出力とペダル操作量Pのずれに起因する違和感が運転手に発生することを防止することができる。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速Vを検出する車速検出手段2aと、自車両と先行車両との車間距離Lを検出する車間距離検出手段2bと、車速Vを設定車速VSに制御する及び車間距離Lを車速Vで除して算出された車間時間Tを設定車間時間TSに制御する車両制御手段2cと、自車両の後側方の他車両を検出する後側方検出手段2dと、車間距離Lが車線変更を行うために必要な所定車間距離LC以下となった場合で、後側方検出手段2dが自車両の後側方の他車両を検出しない場合に、車線変更時期を報知する報知手段2eを備えることを特徴とする。
(もっと読む)
車両走行制御装置
【課題】 車両が旋回中に所定の速度で走行する走行制御が開始された場合でも、ドライバ対して与える違和感を小さくすることができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、ヨーレートセンサ5から送信されるヨーレート信号および車速センサ7から送信される車速信号に基づいて自車両の旋回状態を検出する。ここで、自車両が旋回状態にあるときにクルーズ設定スイッチ4がONとされた場合には、ACCを開始するとともに、スロットル開度を0に設定して、現状のスロットル開度を維持するようにする。
(もっと読む)
車両の車速制限装置
【課題】車速制限動作を解除した際に運転者の意図に沿った加速を実現することができる車両の車速制限装置を提供する。
【解決手段】車速制限動作が解除された際のギヤ段を、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも小さいとき(dpapbf<X2)にLoギヤ側に1つだけ小さいギヤ段に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも大きくかつ第3の所定の変化割合X3よりも小さいとき(X2≦dpapbf<X3)にLoギヤ側に2つ小さいギヤ段に、更に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第3の所定の変化割合X3よりも大きいとき(dpapbf≧X3)にLoギヤ側に実現可能な最小のギヤ段にそれぞれ変更している。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作の解除後に、車両が急加速することを抑制することができる車両走行制御装置を提供すること。
【解決手段】運転者の制動操作に基づいて油圧による制動トルクを発生するブレーキ装置を有する車両の車速を予め設定された目標車速となるように、エンジンが発生する駆動トルクを制御することで自動走行制御を行う車両走行制御装置において、エンジンは、運転者の加速操作に基づいても駆動トルクを発生するものであり、自動走行制御は、運転者による制動操作の解除に基づいて、運転者による加速操作に拘わらず行われる。運転者による制動操作が解除された場合(ステップST4)、運転者による制動操作の解除から所定時間T(ステップST6)は、エンジンが発生する駆動トルクを車速Vを目標車速Voとすることができる駆動トルクよりも小さく制限されるように、今回の目標駆動トルクETo(n)を算出する(ステップST7,ST8)。
(もっと読む)
追従走行制御システム
【課題】 先導車両のジャークに起因した追従車両の乗り心地悪化を抑制することができる追従走行制御システムを提供する。
【解決手段】 追従走行制御システム1は、先導車両に搭載された送受信器5及びECU6を備えている。ECU6は、スロットル開度を設定するスロットル開度設定部8と、スロットル開度とエンジン回転数とに基づいて要求エンジントルクを設定する要求E/Gトルク設定部9と、送受信器5で受信された後続車情報を入力し、後続車情報に含まれる乗車状態に関する情報に基づいてエンジントルク変化率制限値を設定するE/Gトルク変化率設定部10と、エンジントルク変化率制限値を用いて要求エンジントルクにリミッタをかけることで最終要求エンジントルクを求め、この最終要求エンジントルクに応じてスロットルアクチュエータ15を制御する要求E/Gトルク補正部11とを有している。
(もっと読む)
車両用走行制御装置
【課題】車速変動許容範囲を最適な範囲に変更することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置は、車速を検出する車速センサ11と、目標車速を設定する復帰/加速スイッチ13およびセット/減速スイッチ14と、目標車速設定手段により設定された目標車速を含む車速変動許容範囲を設定する車速変動許容範囲設定手段と、車速変動許容範囲内において指示車速を算出する指示車速算出手段と、指示車速に基づいて車両の走行制御を行うスロットル開度制御部36と、乗員の操作により車速変動許容範囲を変更する上限車速変更スイッチ19および下限車速変更スイッチ20を備える。
(もっと読む)
車両走行制御装置
【課題】車両の発進時の過度な急加速を防止することができる車両走行制御装置を提供することである。
【解決手段】車両走行制御装置1は、アクセルペダル7とは別に運転者の手による操作で車両を加速させるための補助加速操作レバー8と、ECU2と、アクセルペダル7の踏み込み量を検出するアクセル開度センサ3と、補助加速操作レバー8の操作量を検出するレバー操作量センサ4と、車両の車速を検出する車速センサ5とを備えている。ECU2は、アクセルペダル7の踏み込み量、補助加速操作レバー8の操作量、車速に基づいてスロットルバルブ6の開度(スロットル開度)を設定する。このとき、アクセルペダル7及び補助加速操作レバー8によるスロットル開度の設定に対する寄与度を変更する。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
作業車両の車速制御装置
【課題】
本発明は、大きな負荷がかかることによって車速が目標車速に到達しない状態から負荷が抜けた状態に移行した時点で生じる急加速を防止し、それによるショックを低減したり操作感覚の違和感を取り除くことが可能な作業車両の車速制御装置を提供する。
【解決手段】
作業車両のアクセル手段の操作量を検出する操作量検出手段、作業車両の実車速を検出する実車速検出手段、作業車両の負荷を計測する計測手段、操作量検出手段で検出された操作量に対応する目標車速を設定し、計測手段で計測された負荷に応じて、目標車速と作業車両の実車速との偏差が零になるように車速を制御する第1の制御又は目標車速を実車速に応じた低い値に補正し、該補正された補正目標車速と実車速との偏差が零になるように、作業車両の車速を制御する第2の制御を行うコントローラとを備える。
(もっと読む)
1 - 20 / 38
[ Back to top ]