
Fターム[3D244AA24]の内容
Fターム[3D244AA24]の下位に属するFターム
追突防止、車間距離保持 (389)
急加減速、暴走防止 (38)
システムのフェイルセーフ (12)
検出部の信頼性向上 (18)
故障診断 (3)
警報 (134)
誤操作対策 (14)
Fターム[3D244AA24]に分類される特許
21 - 40 / 65
車両用走行制御装置
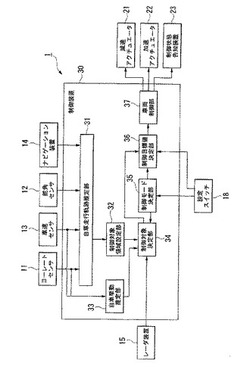
【課題】路上物体や上方物体を車両制御対象としない。
【解決手段】車両用走行制御装置1は、自車両の走行軌跡を推定する自車走行軌跡推定部31と、レーダ装置15および自車走行軌跡推定部31の出力に基づいて自車両の追従制御対象とすべき先行車両を判定する制御対象決定部34と、先行車両に対して追従走行制御を行う車両制御部37と、レーダ装置15により検出された物体が停止物であるか否か判定する停止物判定手段と、自車両が安定走行状態であるか否か判定する自車挙動推定部33と、備え、制御対象決定部34は、自車両が先行車両に対して追従走行制御を実行中であり、先行車両と自車両との間に検出された物体が停止物と判定され、自車両が安定走行状態であると判定された場合には、停止物と判定された物体を先行車両として判定しない。
(もっと読む)
居眠り警報装置

【課題】運転者の居眠りを検知したときに、周囲の交通の流れを可能な限り乱さずに運転者を覚醒させる居眠り警報装置を提供することを課題とする。
【解決手段】
この居眠り警報装置は、複数の変速段を有する変速機と、この変速機の変速制御を行うドライブトレインECU15と、車速を定速制御する定速制御装置14とを備える車両に搭載される。居眠り警報ECU11は、運転者の居眠り状態を検知するドライバモニタカメラ12の検知結果に基づいて運転者が居眠り状態であると判定すると、ドライブトレインECU15に変速段をダウンシフトさせ、定速制御装置14に車速を定速制御させる。
(もっと読む)
車両の運転支援方法及び車両の運転支援装置
【課題】異なる条件の後方車両の追突に対して、その異なる条件に応じて最適な運転支援をすることができる車両の運転支援方法及び車両の運転支援装置を提供する。
【解決手段】CPU2は、加速制御しても前方車両に追突する状態にあって後方車両との追突が回避できないと判断したとき、後方車両の車速及び自車両の車速の他に、自車両の車重量と後方車両の車重量を考慮にして最小の衝撃力で後方車両に追突されかつ前方車両に追突しない場合の加速度を演算する。そして、CPU2は、燃料噴射制御装置15を介して、演算した加速度で自車両を加速制御するようにした。従って、自車両は、後方車両の車種に左右されることなく、最小の衝撃力で追突を吸収することができる。
(もっと読む)
車両用制御装置
【課題】クルーズ制御を行っている際の安全性を飛躍的に高めること。
【解決手段】オートクルーズ制御中に、運転者の集中度を示す実集中度と、周囲環境から求められる要求集中度との関係に基づいて、自車両の置かれた周囲環境において、運転者の実集中度が安全性の面で不十分であるおそれが生じたか否かを判定する。そして、運転者の実集中度が不十分であるおそれが生じた場合には、安全性を高めるため、オートクルーズ制御中であっても、設定車速よりも低い制御車速を演算し、その制御車速に一致するように、自車両の速度を制御する。これにより、運転者の状態や周囲環境が変化しても、常に車両を安全に走行させることができる。
(もっと読む)
車両用走行制御装置
【課題】カーブにおいてドライバの運転感覚に合った車速制御を行う車両用走行制御装置を提供することを課題とする。
【解決手段】車両の車速制御を行う車両用走行制御装置であって、走行路がカーブであるか否か検出するカーブ検出手段と、カーブ検出手段で検出したカーブにおける入口側で減速制御を行う減速制御手段と、カーブ検出手段で検出したカーブにおける出口側で加速制御を行う加速制御手段とを備え、カーブ検出手段で検出したカーブにおける道路環境情報(道路種別など)及び/又は自車情報(燃料残量など)に基づいて目標加速度及び/又は目標減速度を設定することを特徴とする。
(もっと読む)
交通システム、車両および交通信号制御機
【課題】右折感応制御を行う交差点に設置された信号機の右折青矢印灯の表示に関する情報を車載機に提供する交通システム等を提供することを目的とする。
【解決手段】右折専用車線に設置された車両感知器3からの車両感知信号に応じて、信号灯器2Aaの右折矢について右折感応制御を実施する交差点において、前記右折矢に関する右折表示情報を車両Cの車載機6に提供する。前記右折表示情報を受け取った車載機6は、前記右折表示情報に基づいて、交通信号制御機1Aによる右折矢の延長等の動作を予測し、前記予測に基づいて車両Cの制御等を行う。車載機6において右折矢の表示がどのタイミングで終了するかを正確に予測することで、右折を予定する車両Cが右折可能か否かを正確に判断することが可能となる。
(もっと読む)
車両用制御装置
【課題】自車両に接近する後方車両をより確実に回避すること。
【解決手段】車両用制御装置10は、後方車両の自車両への接近を検出する接近検出手段1aと、自車両の車速が設定された制限速度以下となるように、車速の制限制御を行う車速制御手段1bと、を備えている。また、接近検出手段1aにより、後方車両の接近が検出されたとき、車速制御手段1bは制限制御を解除するのが好ましい。さらに、車線変更検出手段21aにより、自車両の車線変更が検出されているときにおいて、車速制御手段1bは制限制御を解除するのが好ましい。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
車両の速度制限装置
【課題】 後続車両の追い越し行為に起因する事故が発生する虞を低減し、車両の走行安全性を高めることができる車両の速度制限装置を提供する。
【解決手段】 車両の速度を制限するECU1であって、後続車両の追い越し意図を判断する追い越し意図判断手段と、追い越し意図判断手段が、後続車両に追い越しの意図がある、と判断した場合に、車両の速度を制限する特定速度制限手段とを備える。特定速度制限手段は、追い越し意図判断手段が後続車両に追い越しの意図がある、と判断したときの速度以下の速度に前記車両の速度を制限する。その一方で特定速度制限手段は、後続車両との相対速度が所定値以上である場合には、追い越し意図判断手段が後続車両に追い越しの意図がある、と判断したときの速度に車両の速度を制限する。
(もっと読む)
車両用運転支援装置および方法
【課題】カーブおよびカーブ間において運転者が違和感を感じない最適な車速を実現する。
【解決手段】自車前方の少なくとも2つ以上のカーブまでの距離とそれらのカーブの旋回半径を検出し、各カーブの旋回半径と予め設定したカーブ通過時の横加速度とに基づいて各カーブの目標通過速度を演算するとともに(1)、各カーブの入口で目標通過速度となるような各カーブごとの目標車速パターンを演算し(2〜4)、それらの目標車速パターンの内の最小値を選択して自車の加減速度を制御する(5)。
(もっと読む)
車両の走行制御装置
【課題】ACC制御を作動させたまま、円滑に連続カーブを走行することができる車両の走行制御装置の提供。
【解決手段】ACC制御部10と、自車両の旋回半径を検知する旋回半径検知部11と、自車両の旋回半径が基準半径以下の場合に、ACC制御部10による加速制御を制限する旋回時加速制限部12と、自車両の操舵装置の舵角の変化速度を検知する舵角速度検知部13と、舵角の変化速度の絶対値が基準舵角速度以上の場合に、ACC制御部10による加速制御を制限する切返し加速制限部14とを備える。
(もっと読む)
運転支援装置
【課題】本発明の解決しようとする課題は、ナビ協調制御装置の使い勝手を向上するため、制御開始と終了を自動的にガイドする手段を提供することにある。
【解決手段】地形情報算出手段、入出力手段、協調制御手段、協調制御開始終了設定手段を設けたナビ協調制御装置において、地図上の現在位置とドライバの操作情報をもとに、次回の走行時に開始終了の誘導ガイダンスを行う機能を、協調制御開始終了設定手段に組み込むことにより実現する。
(もっと読む)
オートクルーズ装置およびプログラム
【課題】ユーザの意図しない操作が受け付けられてしまうことを防止しつつ、オートクルーズ装置としての操作性を低下させないようにすること。
【解決手段】スイッチの操作が検出されてからその操作が検出されなくなるまでの間に別のスイッチの操作が検出された(2つのスイッチが同時に操作された)場合(s240「YES」)、それら操作の組み合わせがあらかじめ定められた組み合わせであるときに、定速走行の開始を禁止している(s260→s280)。そして、本実施形態では、定速走行の開始を禁止すべき組み合わせとして、同時に操作されうるスイッチの組み合わせを除いた組み合わせがあらかじめ定められているため、ユーザの意図しない操作が受け付けられてしまうことを防止しつつ、オートクルーズ装置1としての操作性を低下させないようにすることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン回転数の急上昇を伴うことなく大きな減速度を得ることが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力を出力すると共に回生制動力を作用させるモータジェネレータと、目標車速を達成するように前記モータジェネレータの制駆動力を制御する自動走行制御手段と、を備えたハイブリッド車両の制御装置において、前記駆動輪に対して前記回生制動力を限界まで作用させたにも関わらず前記目標車速を上回った場合に下り勾配と判定する下り勾配走行判定手段と、下り勾配と判定した場合に前記モータジェネレータの回生制動力限界値を前記回生制動力が大きくなるように変更する限界値変更手段とを備えた。
(もっと読む)
走行制御装置
【課題】トラクション制御終了後に走行制御を自動的に復帰可能としつつも、トラクション制御と走行制御とが干渉してしまうのを防止する。
【解決手段】走行制御装置は、トラクション制御による駆動力制御期間中の駆動トルク最小値を取得し(ステップS5)、トラクション制御が終了したとき、ACCによる駆動トルク制御の上限値を規定する駆動トルク上限値にその駆動トルク最小値を設定する(ステップS7)。
(もっと読む)
車両速度制御システム
【課題】途中で曲率が変化するカーブにおいても、適切に車両の速度を制御する。
【解決手段】曲率が変化するカーブをナビゲーション装置2により自車両の進行方向に検出し、制御点設定部10によりそのカーブ上に複数の制御点を設定する。こうして設定された制御点ごとに、曲率算出部11により曲率値を求めると共に、自車両の目標横加速度を目標横加速度設定部12により設定する。この曲率値と目標横加速度に基づいて、当該カーブを走行する際の自車両の目標速度を目標速度算出部13により算出し、算出された目標速度に基づいて、車両制御部16により自車両の速度を制御する。
(もっと読む)
滑走艇の運転制御装置
【課題】エンジンが過回転状態にあるときにクルーズ制御操作手段が操作されても、エンジンが過回転状態に保持されることのない滑走艇の運転制御装置を提供する。
【解決手段】エンジン5が特定運転状態であるか否かを判定する特定運転状態判定手段30を設け、モード設定手段30は、エンジン5が特定運転状態であると判定された時は速度設定モードへのモード設定を禁止し、上記特定運転状態でないと判定された時は上記速度設定モードへのモード設定を許可する。
(もっと読む)
運転支援システム
【課題】コストの上昇を防ぎながら車両が対向車と衝突する交通事故を防止する。
【解決手段】自動車が走行を開始すると、車載カメラによって自動車の前方に位置する道路画像の撮影が開始される。黄色い車線が検出されると車線が曲線か否かが判定される。車線が曲線の場合はその曲率が算出される。曲率が算出されると前方の道路を安全に通過するための最適速度が決定される。自動車の速度が最適速度以下に抑えられるようにエンジンに供給する燃料の量を調節する。
(もっと読む)
画像認識装置、車両制御装置、画像認識方法および車両制御方法
【課題】危険度の高い歩行者との距離を優先して算出し、警告や車両制御の実行タイミングを早期化すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から歩行者認識部18が歩行者認識を行なうとともに、優先度設定部19aが画像内における歩行者像のサイズや位置、移動状態に基づいて優先度を設定する。算出順序決定部19bは、優先度の高い歩行者から順に距離を算出するように算出処理部19cによる距離算出の処理順序を決定する。
(もっと読む)
交通状況に応じて車両エンジンを作動および非作動させる装置
先行車両(16)の位置を測定するセンサ(10)と、先行車両(16)の移動状態に応じてエンジンを作動および非作動させる制御装置とを有する、車両(14)のエンジンを作動および非作動させる装置において、制御装置が、同じ車線の少なくとも1つの更なる別の車両(14、18)の移動状態に応じて、エンジンの作動および非作動を制御するために設けられていることを特徴とする。 (もっと読む)
21 - 40 / 65
[ Back to top ]