
Fターム[3D244AD14]の内容
Fターム[3D244AD14]に分類される特許
1 - 19 / 19
車両の走行制御装置

【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
車両の運転支援制御装置

【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】定速走行制御下における燃費性能の改善を図ると共に、高度な安全性を有するハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)の制御装置(26)は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する手段(16)と、車間距離を検出する手段(18)と、走行路面が下り勾配を有する場合に、下り勾配の最下地点bより手前側に設定された惰性走行開始地点aから惰性走行を開始し、車間距離が所定車間距離L1未満となった場合に前記惰性走行を中止する制御手段(26)とを備える。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
作業車両の車速制御装置
【課題】
本発明は、大きな負荷がかかることによって車速が目標車速に到達しない状態から負荷が抜けた状態に移行した時点で生じる急加速を防止し、それによるショックを低減したり操作感覚の違和感を取り除くことが可能な作業車両の車速制御装置を提供する。
【解決手段】
作業車両のアクセル手段の操作量を検出する操作量検出手段、作業車両の実車速を検出する実車速検出手段、作業車両の負荷を計測する計測手段、操作量検出手段で検出された操作量に対応する目標車速を設定し、計測手段で計測された負荷に応じて、目標車速と作業車両の実車速との偏差が零になるように車速を制御する第1の制御又は目標車速を実車速に応じた低い値に補正し、該補正された補正目標車速と実車速との偏差が零になるように、作業車両の車速を制御する第2の制御を行うコントローラとを備える。
(もっと読む)
エンジンの定速運転を変速制御可能な装置と結合する動力システム
【課題】エンジンの定速運転を変速制御可能な装置と結合する動力システムを提供する。
【解決手段】エンジン100が静止状態から起動、及び低速から加速して駆動する過程に、エンジン100を制御して、定速又は定速に近い速度で正味燃料消費率がより高い回転速度区域に運転させることができる。又、エンジンの出力端より、能動的に有段又は無段変速を制御可能な前側変速装置102を駆動することで、出力端から起動、及び低速から加速して駆動する過程及び運転を駆動する場合、エンジンが正味燃料消費率の比較的高い回転速度区域に運転することで、燃料を節約することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の乗員が走行挙動に違和感を与えることを防止しつつ燃費効率を向上させるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド・マネジメントECU36は、車速VPをセット車速VCに追従させるクルーズコントロールの制御時のパラレル運転モードの状態で、パワープラント要求トルクの加算側の更新を規制し、ロックアップ上限トルクに係る所定トルク値に保持するようにし、車速VPが、セット車速VCから車速偏差の上限値ΔVSを減算して得た値未満に低下したとき、シリーズ運転モードに切り換える。
(もっと読む)
車速制御装置
【課題】簡易な構成でロックアップハンチングを抑制すること。
【解決手段】車速制御装置10は、定速走行時の目標車速を設定する目標車速設定手段1dと、走行車速を検出する車速検出手段4と、目標車速に対する走行車速の偏差と、フィードバック制御用の制御ゲイン値と、に基づいて、スロットル要求開度を算出する要求開度算出手段1aと、スロットル要求開度に基づいて、エンジン11のスロットル弁2の開度を制御するスロットル制御手段1bと、トルクコンバータ3のロックアップクラッチ3aをオン状態又はオフ状態に制御するロックアップ制御手段1cと、を備えている。要求開度算出手段1aは、ロックアップ制御手段1cによりロックアップクラッチ3aがオン状態に制御されたときと、オフ状態に制御されたときとで、制御ゲイン値を変更する。
(もっと読む)
車両運転状態評価システム
【課題】自動制御装置を備えた車両において、運転者に対して運転技術の向上に役立つ情報を提示する。
【解決手段】運転状態表示装置1は、車両に搭載された自動制御装置の作動状態を運転状態に基づいて検出し、また、燃費を悪化させる運転が行われたことが検出され、燃費を悪化させる運転が行われたことが検出された場合に、実際に消費された燃料量と、その燃費を悪化させる運転が行なわれずに走行したとした場合の燃料消費量とがそれぞれ演算される。そして、実際に消費された燃料量からその燃費を悪化させる運転が行われずに走行したとした場合の燃料消費量を減じてその燃費を悪化させる運転によって過剰に消費された燃料の量が演算され、演算された過剰燃料消費量が表示部4に表示される。
(もっと読む)
エンジン制御装置及びエンジン制御方法
【課題】エンジン制御においてアイドル条件が成立しても車速の調整を容易にし、かつ無駄なエネルギーの消費を減少させる。
【解決手段】本発明のエンジン制御装置においては、渋滞などの影響で車両がアイドリング状態でクリープ走行しているような場合でも、基本的にエンジン回転数に基づく回転数制御ではなくオートクルーズ制御が行われる。このため、車両が低速域で走行している場合にも車速の微調整が容易になる。その結果、基本的にブレーキ制御を伴わないか或いはブレーキ制御が抑制され、車両の低速走行時における無駄なエネルギーの消費を減少させることができる。
(もっと読む)
車両用走行制御装置
【課題】 クラッチペダルが操作されているときであっても走行制御が可能となり、走行性能を向上することができる車両用走行制御装置を提供する。
【解決手段】 運転者による走行制御開始要求操作を検出する走行制御開始要求操作検出手段と、走行制御手段による走行制御中に運転者によるクラッチペダル操作が検出された場合には内燃機関の回転数をシフト段に応じた回転数に制御する回転数制御手段と、を備える。クラッチペダル操作検出手段により運転者のクラッチペダル操作が検出されているときに走行制御開始要求操作検出手段により運転者の走行制御開始要求操作が検出された場合には、走行制御手段は走行制御を開始するとともに、回転数制御手段は内燃機関の回転数をシフト段に応じた回転数に制御する回転数制御を開始する。
(もっと読む)
車両およびその制御方法
【課題】 定速走行をより容易に迅速に行なうと共に運転状態に応じて定速走行を行なう。
【解決手段】 アクセルオンの状態からアクセルオフとしたときにそのときの車速Vを目標車速V*として設定し(S440)、車速Vが目標車速V*となるよう走行用の動力を出力するエンジンやモータを制御する。目標車速V*が設定されているときに運転者がブレーキペダルを踏み込み、その後にブレーキペダルを離したときには、そのときの車速Vを目標車速V*に設定し(S510)、定速走行を再開する。このとき、ハンドル操作が行なわれると、ブレーキペダルを踏み込む直前に設定されていた目標車速V*を再び目標車速V*として設定して(S520)、定速走行を再開する。これらの結果、定速走行をより容易により迅速に行なうことができると共に運転状態に応じて定速走行を行なうことができる。
(もっと読む)
車間距離制御を行う方法及び装置
本発明は、車間距離制御を行う方法及び装置に関し、これによれば、前記車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定され、前記重み付け値(gi)が、第1の計算ステップで論理的に結合されて、距離変数のための論理結合値(f)を形成する。距離変数のための設定値(dsetp)が論理結合値(f)から決定され、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう起動される。第1の計算ステップの後に第2の計算ステップが続き、ここで、論理結合値(f)が、予め定義された値の範囲に限定され、距離変数の設定値(dsetp)が、適宜限定される論理結合値(f)から決定される。 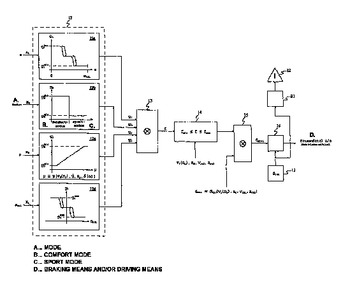 (もっと読む)
(もっと読む)
1 - 19 / 19
[ Back to top ]