
Fターム[3D244AD23]の内容
Fターム[3D244AD23]に分類される特許
1 - 16 / 16
車間距離制御装置
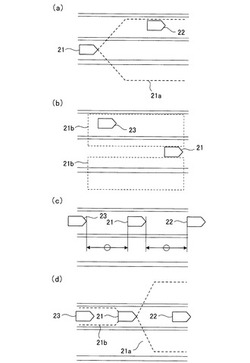
【課題】より安全性の高いACC走行時の車線変更を実現する。
【解決手段】隣接車線を走行する車両の間を目標スペースとして車線変更する際、隣接車線における先行車両22との車間距離と後続車両23との車間距離とが等しくなるよう車速を制御し、車線変更後は、先行車両22との車間距離をACC設定車間距離に戻す際、後続車両23との車間距離が基準車間距離Lbase以下のときは、減速度を限定した上で先行車両22との車間距離がACC設定車間距離Laccとなるような車速を決定することで、より安全性の高いACC走行時の車線変更を実現する。
(もっと読む)
車両用走行制御装置

【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
車両用速度制御装置
【課題】目的とする車速に向けて車速を低下させる場合に、運転者にとって操作の煩わしさや操作のしにくさをより生じにくくすることを可能にする。
【解決手段】車両の運転者からの操作入力を受けてON状態に切り替わったことを示す手動スイッチ信号を出力する手動スイッチ7と、手動スイッチ信号に従って、現在の設定車速から所定の量の速度を減じた新設定車速を算出する設定車速決定部11と、一定時間をかけて現在の設定車速から新設定車速へ移行するために逐次とるべき目標速度を算出する目標速度算出部12と、目標速度と現在車速との差をもとに、目標速度を実現するために必要な減速度である要求減速度を算出する要求減速度算出部13と、を備え、逐次算出される要求減速度に従った減速度で逐次減速を行わせていくことによって新設定車速に自車速を合わせる。
(もっと読む)
自動車およびその制御方法
【課題】先行車両に追従する定速走行中の制御時における車両のエネルギ効率の向上を図る。
【解決手段】レーダクルーズコントロール制御によって車両に比較的大きな制動力が要求されているときには、運転者によってブレーキペダルが踏み込まれたときより小さな速度V2を置き換え車速Vchに設定し(S230)、車速Vが置き換え車速Vch以上のときには、要求制動トルクTr*の範囲内でモータを回生制御し(S150〜S170)、車速Vが置き換え車速Vch未満のときには、モータによる制動トルク(回生トルク)を油圧ブレーキによる制動力にスムーズに置き換える(S180,S190)。これにより、レーダクルーズコントロール制御中の車両のエネルギ効率を向上させることができる。
(もっと読む)
オートクルーズ装置
【課題】 先行車との車間距離を保持しながら走行可能なオートクルーズ装置に関し、常に適切なタイミングで補助ブレーキを作動させることを目的とする。
【解決手段】 先行車に対する目標車間距離doを算出する目標車間距離算出手段26と、先行車との実際の車間距離dを求める実車間距離検出手段18と、目標車間距離doと実車間距離dとの偏差Δdを求める車間距離偏差算出手段28と、目標車間距離doと該車間距離偏差Δdとの比としての車間距離偏差率drを求める車間距離偏差率算出手段30と、少なくとも該車間距離偏差率drに基づいて該車両の制動装置を制御する制動装置制御手段22とを有するように構成する。
(もっと読む)
車両の定速走行装置
【課題】車両乗員の違和感を生じさせずに、車両が目標巡航速度で定速走行できるようにする。
【解決手段】目標巡航速度となるように車速を制御する車両の定速走行装置であって、段階的に制動力を生じさせる第1補助ブレーキ12,13,14と、該車両の加速度を検出する加速度検出手段25と、該加速度検出手段25によって検出された該加速度が第1閾値αTH1よりも大きくなると該第1補助ブレーキ12,13,14を作動させる補助ブレーキ作動手段28と、該車速を検出する速度検出手段15と、該速度検出手段15により検出された該車速が増大するに連れて該第1閾値αTH1を減少させる閾値変更手段27とを有するように構成する。
(もっと読む)
車間自動制御装置
【課題】 本発明は、安全な車間距離を自動的に確保するための車間自動制御装置に関し、車両の積載重量を荷重計により測定することなく積載重量を推定し適正車間の制御を行うことを目的とする。
【解決手段】 車両に積載される荷物の積み下ろし情報を入力する入力手段と、前記積み下ろし情報に基づいて現在の車両の重量を求める重量算出手段と、前記重量算出手段で求められた前記車両の重量に基づいて前記車両の速度を適正車間になるように制御する制御手段とを有することを特徴とする。
(もっと読む)
重作業用乗り物用の適応クルーズコントロール
乗り物の速度を制御する適応クルーズコントロール装置及び方法が開示される。装置は、一般に、選択されている速度未満の乗り物の制限速度に関連しているトルク指令を求める制御装置を有している。方法は、一般に、乗り物と乗り物の経路内で検出された物体との間の距離を求めることと、選択されている速度未満の制限速度に関連しているトルク指令を少なくとも距離から求めることと、トルク指令を乗り物のエンジン制御装置に送信することとを有している。  (もっと読む)
(もっと読む)
定速走行制御装置及び制御方法
【課題】オートクルーズ走行時で、降坂時のオーバーシュート量を抑制し、一定走行時の速度安定性を確保すること。
【解決手段】主制動装置B4と、複数の補助制動装置B1〜B3と、燃料噴射制御手段11と、定速走行制御を行うべく燃料噴射制御手段11をして燃料噴射量を制御せしめ且つ主制動装置B1及び複数の補助制動装置B1〜B3の作動を制御する定速走行制御手段10と、車速検出手段12と、エンジン負荷検出手段13と、を有する車両において、定速走行制御手段10は降坂時に目標車速に対して実車速が超過した場合に、最初に最も制動能力の低い補助制動装置B1を作動させ、それでも目標車速に対する実車速が超過していれば、次に制動能力の低い補助制動装置から順に作動させるべき補助制動装置B1〜B3を追加し、最後に主制動装置B4を作動させるべき制動装置に追加するように制御する。
(もっと読む)
リターダを有する車両の車速の制御及び/又は調整のための方法
リターダを有する車両の車速の制御及び/又は調整方法に関連して、リターダを接続すると、記憶された基準速度に対する走行速度の行過ぎが減少又は回避される。その場合記憶された基準速度に到達する前にリターダが接続され、このため記憶された基準速度に到達する前にリターダの制動作用が働き、車両の加速が減少又は最小化される。 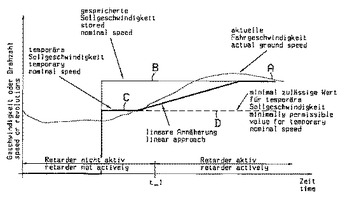 (もっと読む)
(もっと読む)
ダンプトラックの速度表示装置
【課題】 現在の走行制御モードを容易に確認できるとともにオートクルーズ制御とオートリタード制御における目標速度をそれぞれ容易に設定し確認可能なダンプトラックの速度表示装置を提供する。
【解決手段】 車体速度を速度スケール上で表示する速度メータ(20)は、現在の走行制御モードを表示する走行制御モード表示手段(C3)を有するとともに、走行制御モードに応じてオートクルーズ制御における目標速度及びオートリタード制御における目標速度のいずれか一方を速度スケール上に表示する目標速度表示手段(C2, C21, C22)を有する。
(もっと読む)
1 - 16 / 16
[ Back to top ]