
Fターム[3D244AE16]の内容
Fターム[3D244AE16]に分類される特許
1 - 15 / 15
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
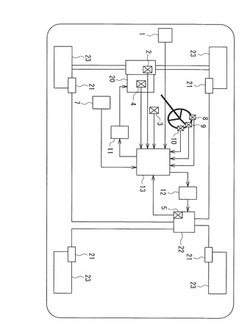
車両クルーズコントロールを制御する方法及びシステム

本発明は、車両クルーズコントロールを制御する方法であって、前記方法は、クルーズコントロールを作動状態にすると共に、車両設定目標速度(Vcc設定目標速度)を維持するように設定して、車両を運転するステップと、坂の上り坂を走行中に、車両の減速によって、車両設定目標速度より低い第1車速(Vmin)まで車速が低下し、しかも減速が0に減少した、又は車両設定目標速度まで車速を高めるために車両が加速し始めた第1車両位置(A)を登録するステップと、頂上から第1距離(y1、y2)を過ぎた地点での、頂上から下り坂の第2位置(C1、C2)における所望の車速(Vbcc超過速度)を登録するステップと、前記所望の車速に基づいて、第1距離(y1、y2)を走行中に最小限化又はゼロ燃料消費で、所望の車速に達することができるように、車両が頂上を通過しなければならない、頂上での車両最低速度(Vmin1、Vmin2、Vmin3)を計算するステップと、車両が、頂上を通過するとき車両最低速度(Vmin1、Vmin2、Vmin3)に達するように、第1車両位置(A)から頂上(B)までの第2距離(x)を走行中の車速を制御するステップとを含む。 (もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
車両用制御装置
【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】運転者の運転特性に応じてより違和感の無い車両の走行制御を行うことができる車両用走行制御装置を提供する。
【解決手段】運転者の減速意思を検出するドライバ操作状態検出部26、アクセル操作検出部28、ブレーキ操作検出部29と、システム作動距離Lthと減速意思距離Ldとの偏差を距離偏差として算出するとともに該安全装置の作動対象となるカーブ曲率と距離偏差とを対応付けて運転特性として記憶する運転特性記憶部37と、新たに検出されたカーブ曲率と運転特性記憶部37に記憶されている運転特性とに基づいて安全装置の作動タイミングを変更する適正車両状態変更部36とを備えたことを特徴とする。
(もっと読む)
車両用制御装置
【課題】車両の燃費を向上させつつ、運転者の加速要求を駆動力に適切に反映させる。
【解決手段】車両用制御装置10は、車両の駆動力を発生する内燃機関Eの吸気系において吸入空気量を調整するDBWドライバ12およびDBW13とスロットル弁とを具備し、車間距離センサ33により検出される車間距離Dに基づき先行車両が存在しないと判定し、かつ、車両の発進時にアクセルペダルセンサ32により検出されるアクセルペダル開度APの変化が所定の下限閾値Lim_L以上かつ上限閾値Lim_H未満である場合に、標準発進加速状態であると判定し、内燃機関Eでの燃料消費量が最小となるようにしてスロットル弁による吸入空気量を制御する。
(もっと読む)
運転支援装置、運転制御装置、及びプログラム
【課題】運転者の加速操作の特性を考慮して、適切な運転支援を行なうことができるようにする。
【解決手段】特徴量算出部22によって、車両走行時の車速の時系列データに基づいて、車両の運転者が加速操作を行なったときの加速終了地点で目標車速が得られるように一定加速度で走行したときの加速開始からの所要時間と、加速操作を行なったときの車速の時定数とに基づいて定まる、運転者の加速特性を表わす特徴量を算出する。そして、算出手段によって算出された特徴量に基づいて、運転支援を行う。加速特性を表わす特徴量を算出して、運転支援を行なうことにより、運転者の加速操作の特性を考慮した適切な運転支援を行なうことができる。
(もっと読む)
運転支援装置
【課題】低速オートクルーズ(ACC)機能のオン/オフをドライバの嗜好や技能に合わせて自動的に行う。
【解決手段】低速ACC制御推論装置40では、低速ACC装置1が手動でオンにされたときに周辺監視装置10により取得される周辺監視情報の履歴をACC操作履歴データベース(DB)43に記憶し、走行シーン推定処理41により、現在の周辺監視情報と、記憶されている履歴に基づいてACC機能の自動オン監視エリアか否かを判定し、自動オン監視エリアと判定した場合に、ACCオン/オフ推定処理42により、現在の周辺監視情報に基づいてACC機能を自動的にオンにするか否かを判定する。また、自動的にオンにした後、現在の周辺監視情報に基づいて自動的にオフにするか否かを判定する。さらに、内装品の操作が検出されたとき、ドライバの視線が自車の運転行動にかかわる監視領域から外れたときに、ACC機能を自動的にオンにする。
(もっと読む)
車間距離制御型定速走行装置
【課題】先行車の減速や他車の割り込みによって車間距離が急に減少した場合でも、先行車へ接近し過ぎないように制御する。
【解決手段】警報の発令状況、車間距離制御の解除操作状況および車両の操作量に基づいて、警報発令条件および/または車間距離制御開始条件を変更する。これにより、運転者ごとの好みや癖、あるいは運転経験に合わせた最適なタイミングで警報を出すことができ、先行車へ接近し過ぎるのを防止できる。
(もっと読む)
車両の制御装置及び車両制御用情報の車両間相互利用システム
【課題】メモリに記憶している環境情報がクリアされてしまった場合でも、環境情報を用いた車両の制御を高い制御精度で継続して行えるようにする。
【解決手段】記憶手段12Aの記憶内容がクリアされた場合、車車間通信手段16Aによって自車両2Aを基準とする所定エリア内の他車両2Bに対し、他車両2Bが有する環境情報の送信を要求する。そして、他車両2Bから送信された環境情報を取得し、自車両2Aに関する環境情報として記憶手段12Aに記録する。
(もっと読む)
運転装置の制御装置
【課題】運転者の能力等に合わせて操作装置の操作性を調整でき、車両の運転を容易化することが可能な運転装置の制御装置を提供する。
【解決手段】操作レバー20を含み操作レバー20の操作位置を出力する操作装置10と、車両のブレーキ及びアクセルを動作させる駆動系60,70とを備える運転装置において、操作位置に応じて駆動系60,70の制御量を決定し制御する制御装置50であって、操作位置と駆動系60,70の制御量との関係を変更可能に形成されている。この構成によれば、ユーザの能力、好みや車両の状況に合わせて操作装置10の操作性を調整できる。
(もっと読む)
燃料供給システムの制御装置
【課題】燃料供給ポンプの特性ずれを好適に反映して当該ポンプの燃料吐出量を精度良く制御し、ひいては排気エミッションやドライバビリティの改善を図る。
【解決手段】コモンレール12にはエンジン10に噴射供給するための高圧燃料が蓄圧されており、エンジン10の動力により高圧ポンプ13が駆動されることによりコモンレール12に燃料が圧送される。ECU20は、エンジンのアイドル運転状態で高圧ポンプ13の特性ずれ量を算出するとともに、クルーズ走行状態で高圧ポンプ13の特性ずれ量を算出する。そして、これら2点の特性ずれ量を反映して高圧ポンプ13の燃料吐出量を制御する。
(もっと読む)
車両用走行制御装置および送信波の照射制御方法
【課題】 先行車両との車間距離を正しく検出できる車両用走行制御装置および送信波の照射制御方法を提供する。
【解決手段】 路面からの反射光を先行車両とは誤認識しないように、路面からの反射光の影響を無視できる、路面からある一定の距離だけ離れた高さ位置をレーザ光下限高さとして設定する。先行車両200のリフレクタ201がレーザ光下限高さよりも低い位置にある場合には、先行車両200の後端部におけるレーザ光下限高さが基準照射方向となるように、コントローラ16が基準照射仰俯角を演算して車間距離センサ11に信号を出力する。車間距離センサ11は、コントローラ16からの信号に基づいて基準照射仰俯角を設定して、レーザ光により走査する。なお、先行車両200のリフレクタ201がレーザ光下限高さよりも高い位置にある場合には、レーザ光の基準照射方向は、先行車両200のリフレクタ201が存在する方向に設定される。
(もっと読む)
制動操作矯正装置
【課題】後続の車両の追突可能性や同乗者の不安を低減するために、運転者の制動操作の癖を矯正する。
【解決手段】運転者の制動操作を検知する制動操作検知手段1、2と、制動操作検知手段1、2で検知された制動操作を予め設定された制動操作モデルと比較してその制動操作モデルに対する乖離度合いを判定する乖離度合判定手段と、その乖離度合判定手段で判定された乖離度合いを記憶する乖離度合記憶手段と、その乖離度合記憶手段に記憶された乖離度合いの履歴に基づいて運転者の制動操作が適切か否かを判定する制動操作判定手段と、その制動操作判定手段で運転者の制動操作が適切でなく癖があると判定されたときに運転者に制動支援を行なう制動支援手段6とを設け、その制動支援により運転者の制動操作の癖を矯正する。
(もっと読む)
車両用制御装置
【課題】 運転者に適切な目標車間関係値を学習補正する車両用制御装置の提供を目的とする。
【解決手段】 自車と先行車との目標車間関係値を設定し、その設定値に基づく制御を自車に対して行う車両用制御装置において、運転者が前方を見ているか否かを判別可能な顔向きセンサ12を備え、前方を見ていると判別されたときにブレーキスイッチ15がオンした時(運転者によりブレーキ操作が行われた時)の実車間関係値について学習した結果に基づいて、目標車間関係値の設定値を補正することを特徴とする車両用制御装置。
(もっと読む)
1 - 15 / 15
[ Back to top ]