
Fターム[3D246EA09]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 伝達装置 (422)
Fターム[3D246EA09]の下位に属するFターム
メインクラッチ (55)
変速機 (256)
左右輪のディファレンシャルギア (58)
4輪駆動装置 (40)
Fターム[3D246EA09]に分類される特許
1 - 13 / 13
作業車両の回生制御装置および作業車両の回生制御方法
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
差動制限機構の制御装置

【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
ハイブリッド自動車
【課題】走行モードが切換えられる際のトルクショックを低減し、切換え後の変速制御を排除できるハイブリッド車を提供する。
【解決手段】車両1に搭載されるエンジン2と、走行用モータ4と、バッテリ12と、発電機3と、車速検出手段se1、se2と、バッテリの残容量Eqを検出する残容量検出手段16とを備え、残容量Eqが第1閾値Eq1以上の場合に第1走行モードEV、第2走行モードMs、第3走行モードMpのいずれかで走行するよう選択するモード選択手段A1を備え、モード選択手段A1は、残容量Eqが第1閾値未満の状況下では第1速度Sc1より小さい第2速度Sc2以上の場合に第3走行モード域Mpを選択し、所定の第2速度Sc2未満の場合に第2走行モードMsを選択し、第3速度未満Sc3の場合に第1走行モードEV又は第2走行モードMsを選択する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
運転支援装置
【課題】 その時の状況に即したより適切な運転支援をおこなう運転支援装置を提供する。
【解決手段】
本発明に係る運転支援装置1は、第1および第2の判定手段として機能するECU2が、対象交差点に進入する自車の車速が、警報を鳴らす車速の閾値である下限車速を上回っていると判定した場合には警報を鳴らし、下限車速以下であると判定した場合には警報を鳴らさない。また、ECU2は、自車の進行方向が直進か否かを判定し、直進でない場合には下限車速を所定の補正値αだけ減らし、直進である場合には下限車速を減らさない。それにより、対象となる交差点に進入する車両が、直進するか否かにより下限車速が変わることとなるため、たとえば対象交差点において右折しようと車両が、直進車両に適用される下限車速以下であっても、下限車速から補正値αを減算した車速よりも高い場合には警報が鳴らされる。
(もっと読む)
ブレーキ制御装置
【課題】回生協調制御において運転者への違和感なく液圧制動力の併用へとスムーズに遷移させる。
【解決手段】ブレーキ制御装置は、回生制動力に液圧制動力を併用して要求制動力を発生させる。この装置は、目標圧と実液圧との偏差が許容範囲外にある場合には偏差を該許容範囲に収めるように実液圧を制御し、偏差が許容範囲内にある場合には実液圧を保持することにより液圧制動力を制御する液圧ブレーキユニットを備える。液圧ブレーキユニットは、液圧制動力による補填が必要となるタイミングを検出し、該タイミングにおいて目標圧を嵩上げする制御部を備える。
(もっと読む)
パーキング装置
【課題】パーキングレンジへのセレクト操作時に左右の車輪の回転を同時に固定できるパーキング装置を提供する。
【解決手段】パーキング装置130は、一対の車輪3を独立駆動する駆動軸33にそれぞれ設けられる歯車形状のパーキングギヤ131と、セレクトレバーがパーキングレンジにセレクト操作されたときに、パーキングギヤ131の歯溝131bに噛合して車輪3の回転を規制する凸部132aを有するパーキングポール132と、パーキングギヤ131の歯溝131bにパーキングポール132の凸部132aが噛合する前に、2つのパーキングギヤ131の歯131aの位相差に基づいて、各パーキングギヤ131の歯131aの位相を同期させる位相同期手段と、を備える。
(もっと読む)
車両の制御装置
【課題】この発明は、車両の制御装置に関し、車両コースト状態からの加速時に、燃費悪化を招来することなく駆動系のギヤの歯面間のガタ詰めを良好に行うことを目的とする。
【解決手段】車両を駆動する内燃機関14を備える。内燃機関14の駆動力を駆動輪12bに伝達する変速機16、デファレンシャル装置20を備える。駆動輪12bに制動力を付与可能な液圧式ブレーキ24を備える。アクセル開度の変化に基づきコースト状態からの加速要求を検出した場合に、液圧式ブレーキ24を用いて駆動輪12bに制動力を瞬間的に付与する。
(もっと読む)
ブレーキ装置、ブレーキ制御装置およびブレーキ制御方法
【課題】液圧制御の減圧時にその目標液圧に確実に収束させることができ、特に目標液圧がゼロである場合にブレーキの引きずりを発生させないブレーキ制御技術を提供する。
【解決手段】ブレーキ装置においては、液圧制御においてその目標液圧に不感帯領域を設定している。そして、回生協調制御において液圧制御から回生制御へ切り替える際、残圧低減条件の成立により、目標液圧を本来収束させるべきゼロよりも低く設定する残圧低減制御が実行される。
(もっと読む)
車両の車速制御装置
【課題】所定の設定速度に制御しつつ旋回限界を超えずに安定した旋回を確保可能な車両の車速制御装置を提供する。
【解決手段】先行車との目標車間距離に対応する所定の設定車速に応じた第1の目標車速指令値Vacc を演算し、その第1の目標車速指令値Vacc となるように車両の速度制御を行う先行車追従制御と、車両が安定して走行可能な限界旋回状態に近づいたと判定すると車両の安定した旋回走行を維持するために必要な目標減速度を演算しその目標減速度に応じた制動力を車両に負荷する旋回安定制御を行う。このとき、上記旋回安定制御が演算した目標減速度に応じた第2の目標車速指令値Vcop と、上記先行車追従制御が演算した第1の目標車速制令値とのいずれか小さい値側の目標車速指令値となるように排他的に車両の速度を制御する。
(もっと読む)
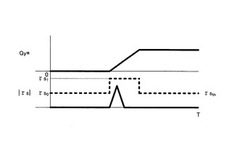
車両の横転防止及び警告システムのための予測横荷重伝達比の特定方法
一定時間にわたって車両運動因子を測定することによって車両の予測横荷重伝達比を決定し、この予測横荷重伝達比に基づいて車両の運転を制御するステップを含む車両の安定性制御方法。 (もっと読む)
協調型トラクション制御システム
個々の車輪の空転及び/又は横滑りを個別に制御する協調型トラクション制御システムである。該システムは、特定の車軸に備えられた所定の車輪に掛かる駆動トルクの量を調節できる駆動トルクアクチュエータに接続されている既存のトラクション及び挙動安定化モジュールを使用している。このシステムは、空転及び/又は横滑りしている車輪の駆動トルクの制御を行うか、或いは、ブレーキを作動させてスロットル角度を調節するとともに該駆動トルクの制御を行って、車輪の空転及び/又は横滑り及び/又は車両の動作を低減又は制御する。 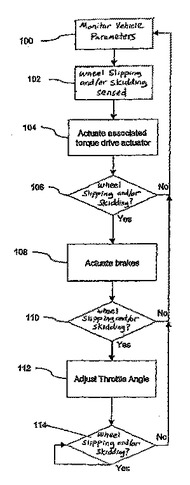 (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]