
Fターム[3D246EA13]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 伝達装置 (422) | 左右輪のディファレンシャルギア (58)
Fターム[3D246EA13]に分類される特許
1 - 20 / 58
車両旋回挙動制御装置
【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置

【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
駆動力伝達装置
【課題】装置を小型軽量化できると共に応答遅れを極めて少なくでき、さらに前輪または後輪のスリップ時のトラクションを向上できる駆動力伝達装置を提供すること。
【解決手段】駆動源5の駆動トルクは中央差動制限装置7から前部差動装置4及び後部差動装置10に分配され、前部差動装置4及び後部差動装置10に分配された駆動力は、前輪2FL,2FR及び後輪2RL,2RRに分配される。前部差動装置4及び後部差動装置10の少なくとも一方と、中央差動制限装置7とはトルク感応式の差動制限装置で構成されているので、装置を小型軽量化できる。また、車輪2のスリップ時には、スリップした車輪2の駆動力が、トルク感応式の中央差動制限装置7により前輪2FL,2FR又は後輪2RL,2RRに増幅して非差動で分配される。その結果、スリップ時のトラクションを向上できると共に、時間的な応答遅れを極めて少なくできる。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
差動制限機構の制御装置
【課題】要求されるLSD(差動制限機構)の作動と、LSDの作動により生じる操舵反力変化に起因して発生する操舵違和感の抑制とをバランスさせることができるようにした、差動制限機構の制御装置を提供する。
【解決手段】車両の左右輪の差動を制限する差動制限機構5と、差動制限機構5を制御する制御手段10とを有する車両において、車両の操舵角を検出する操舵角検出手段8aと、車両の操舵トルクを検出する操舵トルク検出手段9と、を有し、制御手段10は、操舵角検出手段8aにより検出した操舵角の方向と、操舵トルク検出手段9により検出した操舵トルクの方向とが異なった際に、差動制限機構5の制御量を減少させる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
ドライバー支援システム及びドライバー支援システムの調整のための方法
【課題】車両の中のブレーキ装置と車の車軸の二つの駆動車輪の間のアクティブリミテッドスリップデフとの間の、改良され且つ簡単化されたネットワークを作る。
【解決手段】ドライバー支援システムは被駆動車軸の車輪の上のブレーキ装置4並びにリミテッドスリップデフ3を含んでいる。少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の中で制動トルク又はロックトルクが求められ、その際少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の後方に配分モジュール2が接続されており、この配分モジュール2の中でブレーキ装置4及びリミテッドスリップデフ3の制御のための制御信号を生み出すことが出来る。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
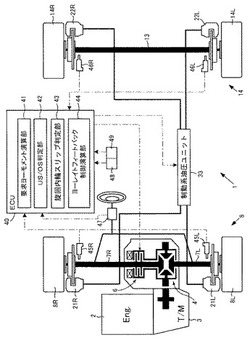
車両の経路追跡システム及び方法
前車軸及び後車軸の各車輪(6、9)に瞬間速度センサを含む自動車車両(1)の経路追跡システム。本発明によれば、システムは、同じ車軸(Aav及びAar)の車輪間の速度偏差を計算する手段(200及び201)と、各車軸の速度偏差間の差を計算する手段(202)と、この差を記憶された閾値(ε)と比較する手段(203)とを含む。本発明は、次の:各前車軸及び後車軸(Aav及びAar)の車輪の速度偏差を計算するステップと、各前車軸及び後車軸(Aav及びAar)間の速度偏差の差を計算するステップと、速度偏差の差を記憶された閾値(ε)と比較するステップとを含む自動車車両の経路追跡方法にも関する。 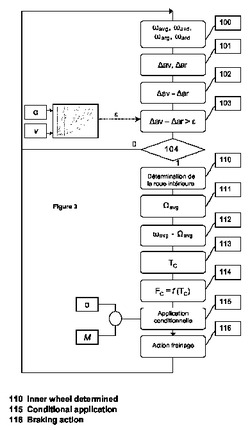 (もっと読む)
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
車両の旋回挙動制御装置
【課題】旋回走行時における制動力制御を正確に行い、走行安定性能を向上させる。
【解決手段】車両の左右駆動輪の制動力を独立して制御可能に構成して、実ヨーレイトと車速及び操舵角から演算した目標ヨーレイトとの差に応じて旋回内輪の制動圧Puまたは旋回外輪の制動圧Poを設定し、車両がアンダーステア状態である場合には、旋回内輪の制動圧Puからデフにおけるフリクションによる拘束トルクTdを減算して旋回内輪の制動圧Pu’を求め(S60)、車両がオーバーステア状態である場合には、旋回外輪の制動圧Poにデフにおける拘束トルクTdを加算して旋回外輪の制動圧Po’を求める(S100)。そして、求めた旋回内輪の制動圧Pu’または旋回外輪の制動圧Po’で左右駆動輪を制動する(S110)。
(もっと読む)
同軸二輪車
【課題】少ない駆動モータで、しかも簡単な構成で左右の車輪に回転差を生じさせることができるデファレンシャルデアを用いた同軸二輪車を提供する。
【解決手段】本発明に係る同軸二輪車は、車体10と、車体10に支持される搭乗ステップ20と、第1の駆動モータ31と、第1の駆動モータ31から駆動力が伝達されるデファレンシャルギア32と、デファレンシャルギア32から駆動力が伝達される車軸33と、車軸33に連結され、同軸上に配置される一対の車輪34と、一対の車輪34に回転差を生じさせる差動発生部35と、一対の車輪34の駆動を制御して車体10の姿勢制御を行う制御部40と、を備える。差動発生部35は、搭乗ステップ20の左右方向への回転角度に基づいて、車輪34の回転を制御するブレーキ機構である。
(もっと読む)
車両の車両車輪に作用する差トルクの発生方法
車両内における差トルクの発生方法において、車両が負荷切換状態にあり、同時に、車両車輪に異なる高さの車輪トルクが作用する走行動特性限界状況にある場合に対して、車両車輪間のトルク分配が変化される。 (もっと読む)
1 - 20 / 58
[ Back to top ]