
Fターム[3D246EA11]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 伝達装置 (422) | 変速機 (256)
Fターム[3D246EA11]の下位に属するFターム
トルクコンバータを持つもの (48)
Fターム[3D246EA11]に分類される特許
1 - 20 / 208
車両のブレーキングを制御するための方法
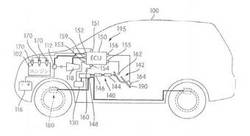
【課題】ブレーキペダルの動作の妨害といったようなブレーキング異常に対処すること。
【解決手段】モータ車両100のブレーキングを制御するための方法であって、ブレーキングシステム140の油圧に関連した情報を受領し;ブレーキペダル表面190に対して印加された圧力に関連した情報を受領し;ブレーキングシステムの油圧とブレーキペダル表面圧力との間の、測定されたブレーキング関係を決定し;所定のブレーキング関係を取得し;測定されたブレーキング関係と所定のブレーキング関係とを比較し;測定されたブレーキング関係が所定のブレーキング関係とは相違するものである場合には、モータ車両の速度を低減し得るよう構成されたブレーキング補助手段を起動する。
(もっと読む)
非常用制動システム

【課題】アクセルペダルとブレーキペダルを踏み間違えたときに瞬時に車両の挙動を安全側に制御する非常用制動システムを提供する。
【解決手段】この非常用制動システムは、ブレーキペダル26と間違えてアクセルペダル20を踏むなどして車両10が暴走してしまうような状況に陥ったときに、空いている左足で操作できるようにされた非常用ブレーキペダル30を踏み込むことにより、車輪ブレーキ22を作動させるとともにオートマティックトランスミッション14をニュートラルに切り換え、エンジン12から車輪への駆動力を遮断するように構成されている。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
パーキング制御装置
【課題】電動車両の駐車状態を安定的に維持する。
【解決手段】電動車両の制御システム21は、Pレンジ指示器19からの信号に応答してアクチュエータ24を駆動し、パーキングロック装置をロック状態にするP基本制御手段51を備える。制御システム21は、充電端子15に充電ケーブル17aが接続されている時に、ロック状態を保持するためのP保持制御手段52を備える。P保持制御手段52は、電源リレー31によりアクチュエータ24への電力供給を遮断し、ロック状態の解除を阻止する。この結果、充電の間中、駐車状態が安定的に維持される。さらに、制御システム21は、自動的にロック状態を提供するP自動制御手段53を備えることができる。制御システム21は、パーキングロックに代えて、ニュートラルレンジとパーキングブレーキとを提供する他レンジ制御手段54および制動制御手段43を備えることができる。
(もっと読む)
車両用減速度制御装置、車両用減速度制御方法
【課題】運転者のブレーキ操作を支援しつつ、減速度の変動を抑制する。
【解決手段】運転者がブレーキ操作を行ったときに、エンジンブレーキによる減速度をライズアップ率Rrで増加させる。そして、減速度をライズアップ率Rrで増加させてから予め定められた時間が経過したら、この時点の減速度から減速度をライズアップ率Rrよりも小さなビルドアップ率Rbで増加させる。また、エンジン被動側の動力伝達状態が、定常状態から低減し、その後、再び定常状態へと復帰したら、減速度の増加率を減少補正する。変速機の変速位置がDレンジからNレンジへ変化したことを検出したときに、動力伝達状態が定常状態から低減したと判断する。また、その後、変速位置がNレンジからDレンジへと復帰したことを検出したときに、再び定常状態へ復帰したと判断する。
(もっと読む)
車両の後退速度規制装置
【課題】車両後退中の車速(後退速度)を運転者によるブレーキ操作/解除に関連付けて適正に規制する。
【解決手段】運転者がブレーキ操作(ブレーキON)を行いながらシフトレンジをRレンジに切り換えた後、最初にブレーキ操作を解除(ブレーキOFF)した時点t1 で、後退速度の制限を開始して所定時間経過後に後退速度の制限を解除する。後退速度の制限中は、制限速度未満の領域では、ブレーキ操作やアクセル操作に応じて後退速度が変化し、制限速度以上の領域では、後退速度が制限速度に制限される。車両を後退させる動力源がエンジンの場合は、後退速度を制限する際に、エンジンの出力を制限せずに、ブレーキ作動制御、自動変速機の変速制御、クラッチのスリップ制御のいずれか1つ又は2つ以上により後退速度を制限する。
(もっと読む)
車両制御装置及び車両制御方法
【課題】自動ブレーキの作動により停止した車両を、長時間に亘って停止させ続けることが可能な車両制御装置、車両制御方法を提供する。
【解決手段】車両に衝突が発生した際に、ブレーキ16を作動させて車両を自動停止させる。そして、車両が停止した場合には、シフトポジションアクチュエータ17の制御により、シフトポジションをパーキングに切り替える。従って、無理なく車両の停止状態を継続させることが可能となり、車両が再度動き出すことを防止することができる。
(もっと読む)
手動変速機付車両の坂道発進補助制御装置
【課題】シフトポジションセンサを用いることなく坂道で停車した手動変速機付車両のずり下がりを抑制してその発進操作を容易化することができる手動変速機付車両の坂道発進補助制御装置を提供すること。
【解決手段】坂道で停車した手動変速機付車両(MT車)のずり下がりが検知されると加圧ポンプを駆動し、ブレーキ液圧を車輪4L,4R,5L,5Rのブレーキ装置17に供給する手動変速機付車両の坂道発進補助制御装置(ECU)13において、所定の勾配以上の坂道で手動変速機付車両のブレーキペダル8の踏み込みによる停車が検知された後、ブレーキペダル8の踏み込みが解除され、クラッチペダルの踏み込みが解除され、アクセルペダル9の踏み込みが検知されているにも拘わらず、ずり下がり方向の車速が所定値以上となったときには、加圧ポンプを駆動してブレーキ液圧を車輪4L,4R,5L,5Rのブレーキ装置17に供給してブレーキ力を発生させる。
(もっと読む)
車両の走行支援装置及び車両の走行支援方法
【課題】降車している運転手が車両を押し歩きする場合に、該押し歩きを支援することができる車両の走行支援装置及び車両の走行支援方法を提供する。
【解決手段】自動二輪車両の制御装置は、自動二輪車両の停車中に運転手が降車していると判定された第1のタイミングt1後に、該判定結果が維持された状態で自動二輪車両の移動開始が検知された場合(第3のタイミングt3)、車載のエンジンのエンジン回転数NEに基づく駆動力を駆動輪に伝達させる支援制御を行う。
(もっと読む)
手動変速機付車両の坂道発進補助制御装置
【課題】シフトポジションセンサを用いることなく坂道でエンストした手動変速機付車両のずり下がりを抑制して運転者によるブレーキ操作や再始動操作を容易化することができる手動変速機付車両の坂道発進補助制御装置を提供すること。
【解決手段】坂道で停車した手動変速機付車両(MT車)のずり下がりが検知されると加圧ポンプを駆動してブレーキ液圧を車輪4L,4R,5L,5Rのブレーキ装置16に供給する坂道発進補助制御装置(ECU)13において、所定の勾配以上の坂道でMT車のブレーキペダル8の踏み込みによる停車が検知された後、ブレーキペダル8の踏み込みが解除され、アクセルペダル9の踏み込みが検知されて車速が所定値以上となった時点でエンジン回転数が所定値以下であるときには、加圧ポンプを駆動してブレーキ液圧をブレーキ装置16に供給してブレーキ力を発生させる。
(もっと読む)
車両の駆動力制御装置
【課題】旋回性能と加減速性能とを両立させることができるように駆動力を制御する装置を提供する。
【解決手段】運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段(ステップS3,S4,S11)と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段(ステップS12,S13,S14)とを備えている。操舵に基づく駆動力の補正を、旋回要求の度合いに応じて変化させるので、旋回特性と加減速特性とを良好な状態に設定できる。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両の運転支援制御装置
【課題】降坂時定速走行制御による定速走行を、たとえエンジンブレーキでは制動力が不足するような領域でも精度良く安定して行うことができ、ドライバに対して的確な路面情報を伝えつつ、変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を実行する際は、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定車速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、制動力が不足すると判定した場合は、Nレンジ位置にさせると共に、車輪の接地荷重配分に応じて不足する制動力を設定する。また、制動力が不足すると判定した場合には、トランスファクラッチトルクTlsdを略0に近い値に設定させ、制動力が十分であると判定した場合には車輪の接地荷重配分に応じて設定させる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】トルクコンバータで発生する発熱量を抑制するためにダウンシフトを実行するに際して、そのダウンシフトによって運転者に与える違和感を抑制することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】トルクコンバータ34の単位時間当たりの発熱量qが上限値qmax以上、または、トルクコンバータ34の速度比eが下限値emin以下となると、通常ダウンシフトが実施されないタイミングでダウンシフトされ、自動変速機26の変速前後に発生する駆動力段差ΔTによって運転者に違和感を与えることとなるが、ダウンシフトの際に発生する、変速前後の駆動力段差ΔTを抑制する制御が実行されるため、運転者に与える違和感を抑制することができる。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】緊急制動操作されていない場合に、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御が不用意に開始されることを抑制することができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVに外乱に基づく振動成分が含まれるか否かを判定する(ステップS74,S76)。そして、ブレーキ用ECUは、含まれると判定した場合に(ステップS74又はステップS76がYES)、第1の減速判定値DV_stを、含まれないと判定した場合よりも大きな値に補正し(ステップS79)、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超える場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
ブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置
【課題】マスタシリンダ内の圧力を検出するための圧力センサを用いることなく、運転手によるブレーキペダルの踏力が高いか否かを判定することができるブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えた時点での車体減速度の変化勾配DDVを第1変化勾配DDV1とし(ステップS86)、Gセンサ値Gが第2の減速判定値G_stを超えた場合に取得された車体減速度の変化勾配DDVを第2変化勾配DDV2とする(ステップS89)。ブレーキ用ECUは、第2変化勾配DDV2が第1変化勾配DDV1以上である場合(ステップS90:YES)に、運転手によるブレーキペダルの踏力が高いと判定する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両の走行する路面の勾配情報に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切なタイミングで開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の走行する路面の勾配情報を取得し、該勾配情報に基づき第1の減速判定値DV_stを補正する(ステップS79)そして、ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超えた場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切なタイミングで終了させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、補助制御の実行中において、車輪速度センサを用いて演算される車体減速度及び車体加速度センサを用いて演算されるGセンサ値Gの少なくとも一方に基づき補助制御の終了条件が成立したか否かを判定する(ステップS122,S125,S126)。そして、ブレーキ用ECUは、終了条件が成立したと判定された場合(ステップS122,S125,S126のうち何れか一つの判定結果がYES)に、補助制御を終了する(ステップS123,S124)。
(もっと読む)
1 - 20 / 208
[ Back to top ]