
Fターム[3D246EA12]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 伝達装置 (422) | 変速機 (256) | トルクコンバータを持つもの (48)
Fターム[3D246EA12]に分類される特許
1 - 20 / 48
SBW車両の制御方法
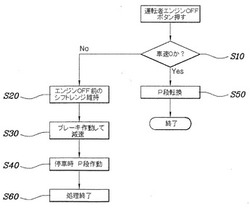
【課題】運転者が意図したエンジンオフ操作はもちろん不注意や非常事態によってエンジンオフ操作をする場合にも、急停車等のように車両の走行に障害をもたらしたり変速機の部品に損傷等が発生したりしないようにし、常に安定したP段転換がなされ、車両の出発時の急発進状況を防止するSBW車両の制御方法を提供する。
【解決手段】車両のエンジンオフ操作がなされると、現在の車速が0であるかを判断する車速判断段階と、現在の車速が0でない場合、エンジンオフ操作以前の変速段を維持する変速段維持段階と、変速段維持段階以後に制動装置を作動させて車速を減少させる減速段階と、減速段階以後の車の停車時にP段に転換するパーキングロック段階、とを含んで構成されたことを特徴とする。
(もっと読む)
駐車支援装置

【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】クラッチ係合状態からのダウン変速時における変速ショックの抑制と燃費の向上とを両立させるハイブリッド車両の駆動装置を提供する。
【解決手段】クラッチK0が係合された状態からの自動変速機16のダウン変速に先立って、そのクラッチK0のトルク容量を低減させると共に、電気式制動装置74及び前記電動機MGの少なくとも一方による制動力を変化させるものであることから、電気式制動装置74乃至電動機MGにより変速ショックを低減するための補償制御を実行するのに必要なトルクを、クラッチK0のトルク容量低下分だけ確保することができるため、電動機MGによる回生量の減少を抑制しつつ変速ショックの発生を好適に抑制することができる。
(もっと読む)
車両制御装置
【課題】走行中の車両が障害物に衝突する可能性がある場合に、シフトダウンによるエンジンブレーキの制動効果を実効的なものとすることができる車両制御装置の提供。
【解決手段】変速機を備えた車両の走行状態を制御する車両制御装置であって、車両周辺の障害物を検出する障害物検出手段と、上記障害物検出手段により検出された障害物と上記車両とが衝突する可能性を判定する衝突可能性判定手段と、上記衝突可能性判定手段による判定結果に応じて上記変速機の変速比を変更する第1の衝突回避手段と、上記衝突可能性判定手段による判定結果に応じてドライバに対する警報またはブレーキ装置の制御による自動的な制動の少なくともいずれか一方の衝突回避動作を上記車両に行わせる第2の衝突回避手段とを備え、上記第1の衝突回避手段による変速比の変更は、上記第2の衝突回避手段による衝突回避動作より前のタイミングで行われることを特徴とする。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
車両の制動制御装置
【課題】要求制動トルクをMGトルクおよびECBトルクの両方で分担するとともに、車両の停止直前にMGトルクをECBトルクに振り替える場合に、MGトルクによる制動をできるだけ低車速まで実施できるようにする。
【解決手段】要求制動トルクがモータジェネレータMGのMGトルクと油圧ブレーキ62によるECBトルクとの両方で分担されるが、車両の停止直前にMGトルクをECBトルクに振り替える際には、ECBトルクを漸増させるとともに、そのECBトルクの増加に対応してロックアップクラッチ30のL/Uクラッチトルクを漸減し、且つ、MGトルクをL/Uクラッチトルク以上に保持しながら漸減する。MGトルクの振り替えと並行してL/Uクラッチトルクが漸減されるため、MGトルクの振替制御の開始時間をそれだけ遅く(低車速)することが可能で、MGトルクの回生制御を低車速まで実施できるようになり、エネルギー回収効率が向上する。
(もっと読む)
車両制御装置
【課題】減速中にエンジンに対する燃料の供給を停止し、かつエンジンと駆動輪との動力の伝達を遮断する場合の制動力の変動を抑制することができる車両制御装置を提供すること。
【解決手段】エンジンと、開放することによってエンジンと駆動輪との動力の伝達を遮断するクラッチと、制御可能な制動装置と、を備え、減速時にエンジンを停止(S4)し、かつクラッチを開放する(S3)ときに、制動装置が発生する制動力を減少させる(S5,S6)。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
ハイブリッド車両
【課題】減速回生中のシフトダウンに関し、運転者の違和感を減少し、また、電力の回収漏れを抑制すること。
【解決手段】第1及び第2変速機構と、前記第1変速機構に接続された電動機と、前記第1及び第2変速機構と断続される内燃機関と、を備えたハイブリッド車両において、運転者の制動要求中、前記電動機による減速回生を行う減速回生制御手段と、運転者の制動要求により前記減速回生制御手段が前記減速回生を行っている場合であって、前記第1変速機構により実現される所定の変速段を選択中に、前記制動要求に係る制動要求量が所定量減少した場合は前記第1変速機構により実現される、前記所定の変速段よりも低速側の変速段に切り替える一方、減少しない場合は前記所定の変速段を維持するシフト制御手段と、を備えたことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】回生協調ブレーキ制御時のショックを抑制することを目的とする。
【解決手段】動力源としてエンジン及びモータジェネレータを備えるハイブリッド車両の制御装置であって、所定の低車速域で、車速に応じた大きさのクリープトルクを駆動トルクとして発生させるクリープトルク発生手段(S10)と、回生協調ブレーキ制御時に前記回生制動トルクが0になるまでは、車速にかかわらずクリープトルクの大きさをハイブリッド車両の駆動系のバックラッシュを抑制可能な0に近い所定のガタ詰めトルクに制限するクリープトルク制限手段(S8)と、回生制動力が0になった後は、クリープトルクをガタ詰めトルクから車速に応じた大きさのクリープトルクへと変化させるときの変化率を制限するクリープトルク変化率制限手段(S9)と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】摩擦締結要素のスリップ制御中にブレーキ操作があった場合に、協調回生制御トルクの増加を禁止することにより、意図しないスリップによるショックの発生を防止可能なハイブリッド車両の制御装置を提供する。
【解決手段】エンジンEngに第1摩擦締結要素CL1を介して締結されたモータジェネレータMGと、モータジェネレータMGと駆動輪との間に介装された摩擦締結要素CL2を含む有段の自動変速機ATと、メカニカルブレーキ操作に基づくブレーキコントローラ9からの目標ブレーキトルクBSと車速情報に基づく最大回生トルクとの差分から目標回生トルクを算出して協調回生制御を実行する協調回生制御実行手段10とを備えている。
協調回生制御実行手段10は、メカニカルブレーキ操作による目標ブレーキトルクBSの増加の判断と第2摩擦締結要素CL2がスリップ中であるか否かを判断する判断部M11と、目標ブレーキトルクBSの増加時でかつ摩擦締結要素CL2のスリップ中に回生トルクの増加を禁止する回生トルク増加禁止手段M11とを有する。
(もっと読む)
車両のブレーキ保持力制御装置
【課題】車両が停止している路面の勾配と自動変速機の油圧状態に応じてブレーキ力の保持を開放するタイミングを変更することによって車両の違和感の無いスムーズな発進を可能とする車両のブレーキ力保持制御装置を提供すること。
【解決手段】油圧で駆動される自動変速機4を備え、ブレーキ装置7のマスタシリンダ11とホイールシリンダ12とを連通させる液圧通路13に設けられた電磁弁14によってマスタシリンダ11とホイールシリンダ12との連通を遮断し、ブレーキペダル9の踏み込みが解除された後もブレーキ液圧をホイールシリンダ12に残してブレーキ力を保持することができる車両のブレーキ力保持制御装置において、車両が停止状態にあるときに前記自動変速機4の油圧が予め定められた閾値を超えると、その時点で車両の発進が可能であると判断してブレーキ力の保持を解除するECU(制御手段)3を設ける。
(もっと読む)
車両の駆動力制御装置
【課題】車両の加速時に駆動輪が回転振動するとき又はその虞れがあるときにはトランスミッションの変速比のアップシフト変更を促進することにより、車両の加速時に於ける駆動輪の回転振動を効果的に抑制する。
【解決手段】車両の加速時に(ステップ110)、駆動輪の回転振動を検出したとき(ステップ130)、若しく走行路がまたぎ路であると判定したときには(ステップ160)、駆動輪の回転振動が終息し(ステップ210)若しくはまたぎ路走行が終了するまで(ステップ220)、トランスミッション16の変速段を演算するための目標駆動力Fp_t_futureを漸減し(ステップ190、200)、トランスミッションの変速段のアップシフトを促進する。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作量又はマスタシリンダ内の流体圧を検出するためのセンサを用いなくても、車両のエンジンを自動的に停止させるタイミングを設定することができる。
【解決手段】ブレーキ用ECUは、加速度センサからの検出信号に基づき車体加速度Gを演算し、該車体加速度Gに基づきマスタシリンダ内のMC圧Pmcに対応するMC圧加速度Amcを演算する。また、ブレーキ用ECUは、路面の勾配に対応する勾配加速度Agを演算する。そして、ブレーキ用ECUは、MC圧加速度Amcの絶対値が勾配加速度Agの絶対値以上となった場合に、エンジンの自動的な停止を許可する停止制御を行う(第3のタイミングt13)。
(もっと読む)
車両の制御装置
【課題】エンジンの自動停止、自動再始動を行う車両において、登坂路での停車時における車両のずり下がりを好適に防止することのできる車両の制御装置を提供する。
【解決手段】エンジン1の自動停止、自動再始動を行う電子制御ユニット11は、エンジン1の停止中の登坂走行時に、停車後の車両のずり下がりが発生するか否かを判定する。そして電子制御ユニット11は、ずり下がりが発生すると予測されたときには、車両のずり下がりが発生する停車時迄にエンジン1の再始動が完了するように同エンジン1の再始動を開始する。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両の自動フリーホイーリング機能を制御する方法及び装置
本発明は、現行のフリーホイーリング状態によりフリーホイーリング機能が起動される車両の自動フリーホイーリング機能を制御する方法及び装置であって、制御ユニットは、前記車両が間もなく、現行の下り坂と比較して更に険しい下り坂(図2の位置Bの下)を走行することを予測し、前記車両が前記更に険しい下り坂に入る前に前記フリーホイーリング機能の作動が位置D(位置Bの上)で停止した場合、前記車両が前記フリーホイーリング機能の作動状態で前記更に険しい下り坂に入った場合と比較して、燃料消費がより少ないか否かをシミュレートし、前記シミュレーションによってより少ない燃料が消費されることが示された場合は、フリーホイーリング機能の作動は前記位置Dで、すなわち前記車両が前記更に険しい下り坂に入る前に停止するようにプログラムされている、方法及び装置に関する。 (もっと読む)
1 - 20 / 48
[ Back to top ]